

МІНІСТЕРСТВО АГРАРНОЇ ПОЛІТИКИ УКРАЇНИ
ВІННИЦЬКИЙ НАЦІОНАЛЬНИЙ АГРАРНИЙ УНІВЕРСИТЕТ
Факультет Кафедра АКМ
Механізації с.-г.
Розрахунково-пояснювальна записка до курсової роботи по курсу птм
На тему: «Поворотний кран»
Технічне завдання – 19-3
Розробив: студент гр.41-М
Тарануха В.П.
Перевірив:к.т.н.
Любін М.В.
Вінниця 2013р.
Вінницький державний аграрний університет
Факультет
Механізації с.– г. Кафедра АКМ
Спеціальність механізація сільського господарства
Курс ___5____ Група____2____ Семестр_____9_____
ЗАВДАННЯ
На курсову роботу по дисципліні
«Підйомно-транспортні машини»
Студенту г. 41-М Тарануха В.П. «Спроектувати
поворотний кран» технічне завдання – 19-3
Зміст розрахунково-пояснювальної записки:
Титульний лист
Завдання
Реферат
1. Розрахунок основних параметрів машини.
1.1.Розрахунок та вибір робочого та тягового органу.
1.2.Тяговий розрахунок.
1.3.Кінематичний розрахунок.
2. Розрахунок основних вузлів машини.
2.1.Розрахунок приводного вала.
2.2.Розрахунок натяжного пристрою.
2.3.Підбір підшипників.
2.4.Розрахунок запобіжного пристрою (при його наявності).
2.5.Вибір компенсуючи муфт.
2.6.Вибір та розрахунок компонентів машини (рама, колісний хід і т.д.).
3. Висновок
Список використаної літератури
(Включити тільки ті джерела, на які є посилання у тексті)
Додаток (Специфікація машини та вузлів)
Дата видачі завдання______________
Керівник проекту_________________
 ЗМІСТ
ЗМІСТ
1.Завдання 4.
2.Вступ 5.
3.Кінематичний розрахунок 7.
4.Розрахунок колони 30.
5.Вибір і розрахунок шпонки 31.
6. Висновок 33.
7. Список літератури 34.
Вінницький національний аграрний університет
Технічне завдання -19 (ТЗ-19)
на курсову роботу по ПТМ
Спроектувати поворотний кран
Дані для розрахунку |
Номера варіантів |
||||||||||
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
||
Вантажопідйомність Q, кН |
15 |
10 |
16 |
25 |
20 |
14 |
30 |
26 |
17 |
14 |
|
Виліт крана L, м |
3,0 |
2,8 |
2,6 |
2,4 |
2,0 |
2,5 |
2,7 |
2,9 |
2,2 |
2,6 |
|
Висота підйому Н, м |
6 |
8 |
7 |
5 |
10 |
9 |
6 |
5 |
7 |
8 |
|
Швидкість розвантаження |
0,15 |
0,1 |
0,2 |
||||||||
Режим роботи |
легкий |
середній |
|||||||||
Графічна частина |
Лист 1 ф. А 1 |
Кран поворотний (загальний вигляд) |
|||||||||
Лист 2 ф. А1 |
Приводний барабан (складальне креслення) |
Колона (складальне креслення) |
|||||||||
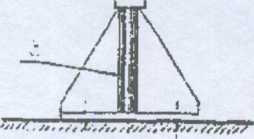
Схема
крана:
1-привод;
2-гакова
обойма;
3-колона.
 Вступ
Вступ
Підйомно-транспортні машини - основа комплексної механізації та автоматизації виробництва. Від правильного вибору раціональних типів машин залежить високопродуктивна робота окремих цехів, дільниць і підприємства в цілому.
Технологічний процес виробництва нерозривно пов’язаний з переміщуванням великої кількості вантажів, починаючи від подавання сировини до видавання готової продукції. У здійсненні вантажних потоків на підприємствах і комплексної механізації процесів праці, основну роль відіграють системи підйомно-транспортних робіт та обладнання.
Підйомно-транспортна техніка розвивається відповідно до потреб суспільства і має історію в кілька тисяч років.
У сучасних умовах потокового і автоматизованого виробництва, значення підйомно-транспортних машин підвищилось. Вони вийшли за рамки свого початкового призначення - допоміжне обладнання для механізації трудомістких процесів виробництва і стали сполучною ланкою в технологічному ланцюзі; забезпечуючи безперервність виробництва, а також основним регулятором потокового процесу, його органічною часткою, що визначає ритм і продуктивність підприємства. На конвеєрних системах виготовляють таку масову продукцію, як автомашини, трактори, різні обладнання і прилади, радіоелектронну апаратуру та ін. Особливо велика роль підйомно-транспортних комплексів у гнучких потокових і автоматизованих підприємствах бо тут вони забезпечують обслуговування технологічних процесів і устаткування.
Конструкції нових поколінь машин потребують вирішення нових задач пов’язаних із їх розрахунком, проектуванням, науковим дослідженням і вибором оптимальних енергоносіїв, які забезпечують високо техніко-економічні показники і якість машини.
 Існує
багато типів підйомних машин конструкція
яких залежить від виду вантажу, місця
та умов установлення, ступеня складності.
У підйомних машинах бувають такі робочі
механізми: піднімання вантажу, переміщення
та повороту крана, зміни вильоту стріли.
Ці механізми можуть застосовувати в
різних комбінаціях, але в усіх машинах
цього класу завжди є механізм підйому.
Існує
багато типів підйомних машин конструкція
яких залежить від виду вантажу, місця
та умов установлення, ступеня складності.
У підйомних машинах бувають такі робочі
механізми: піднімання вантажу, переміщення
та повороту крана, зміни вильоту стріли.
Ці механізми можуть застосовувати в
різних комбінаціях, але в усіх машинах
цього класу завжди є механізм підйому.
До основних типів підйомних машин, залежно від призначення, галузі використання та здійснюваних функцій належать:
підйомники, підіймачі;
підйомні механізми;
крани;
маніпулятори і роботи.
Поворотні крани застосовують для обслуговування обмежених біля сток або передавання вантажу з одного прольоту цеху в інший. Вони бувають стаціонарні та пересувні (які встановлюють у вузьких прольотах цеху чи складу).
 В
залежності від отриманої конструкції
крана, так
як
канат намотується на барабан і блок,
то я вибираю одинарний двохкратний
поліспаст.
В
залежності від отриманої конструкції
крана, так
як
канат намотується на барабан і блок,
то я вибираю одинарний двохкратний
поліспаст.
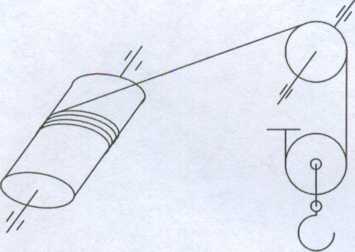
Рис. 1. Схема поліспаста
Приймаємо кратність поліспаста Uп = 2 (таб 1 [1]).
3. Приймаємо номінальну гакову підвіску вантажопідйомністю 3,2т = 32 кН.
Вантажопідйомність, т |
Діаметр каната, мм |
Розміри підвіски, мм |
Вага, кг |
|||
д |
в |
н |
А |
|||
3,2 |
12 |
250 |
254 |
637 |
270 |
35 |


Рис. 2. Гакова підвіска
Розраховую максимальний робочий натяг канату, кгс за формулою:
![]() (1-1)
(1-1)
де Q - номінальна вантажопідйомність крана, кгс
а - число поліспастів в системі підвіски а = 1
![]() - кратність поліспаста,
=
2 (див п.2)
- кратність поліспаста,
=
2 (див п.2)
![]() - загальний ККД поліспаста і направляючих
блоків,
- загальний ККД поліспаста і направляючих
блоків,
![]() ,
,
де
![]() - ККД поліспаста
- ККД поліспаста
![]() -
ККД
направляючих блоків
-
ККД
направляючих блоків
![]() ,
,
де
![]() -ККД
блока з
урахуванням
жорсткості канату. Приймаємо:
-ККД
блока з
урахуванням
жорсткості канату. Приймаємо:
![]()
Звідси:
![]()
а ККД направляючих блоків:
![]() ,
,
де n - число направляючих блоків
 так
як n
= 1, то
так
як n
= 1, то ![]()
Звідси:
![]()
Визначивши
загальний ККД поліспаст, я визначаю ![]()
![]()
Розраховую і вибираю канат:
Діаметр канату визначаю використовуючи умову міцності, кгс
![]() , де
, де
розрахункове розривне зусилля канату;
Бщах - максимальний робочий натяг канату, кгс
Пк - нормований коефіцієнт запасу міцності канату;
З таблиці 2[1] визначаю, що Пк для вантажних і стрілових кранів для легкого режиму роботи становить: Пк = 5,0
Звідси випливає, що:
![]() 505 • 5.0 = 2525
505 • 5.0 = 2525
Потім по фактичному розривному зусиллю визначаю діаметр канату:
dк = 8.3 мм, для якого SР = 3555.
Визначаємо діаметр барабана
Діаметр барабана по центру намотуємого канату визначають із залежності:
Дб>edk (1,3)
де е - коефіцієнт, який залежить від типу і режиму роботи вантажопід- йомної машини.
З таблиці 3 [1] визначаю, що для стрілових кранів, що працюють в легкому режимі, коефіцієнт е = 16. Звідси
 Дб
>
16
• 8,3 =
132,8
мм Приймаю
Дб
=
135
мм
Дб
>
16
• 8,3 =
132,8
мм Приймаю
Дб
=
135
мм
Визначаю окружну швидкість барабану, м/с
(1.4)![]()
де Un - кратність поліспаста Un = 2
V- швидкість підйому вантажу V = 0,15 м/с Звідси: Vб = 2 • 0,15 = 0,3 м/с
Визначаю частоту обертання барабана, хв-1
![]() (1.5)
(1.5)
де Дб = 0,3 - швидкість обертання барабану
Дб = 135 мм - діаметр барабана.
![]() ,
де
,
де
Приймаю nб = 43 хв-1.
Розраховую необхідну потужність електродвигуна за формулою:
![]() (1.6),
(1.6),
Де
![]() -ККД
механізму підйому
-ККД
механізму підйому
![]() =
0,8...0,85
Приймаю
=
0,8
=
0,8...0,85
Приймаю
=
0,8
Q= 10кН= 1 т- 1000 кг
V = 0,1 м/с
Звідси:
![]() кВт
кВт
Вибираю електродвигун
МТF 0.12-6 N = 2.2 кВт
Повне використання ПВ = 40%
Частота обертання вала двигуна 890 хв-1
Вага електродвигуна - 58 кг
 Маховий
момент ротора кгс • м2
= 0,115 Максимальний момент кгс • м = 5,7
Габаритні установчі розміри:
Маховий
момент ротора кгс • м2
= 0,115 Максимальний момент кгс • м = 5,7
Габаритні установчі розміри:
Таблиця 2. Габаритні і установчі розміри електродвигуна

Визначаю загальне передаточне число привода:
![]() (1,7)
(1,7)
де n - частота обертання вала електродвигуна, n = 890 хв-1, nб = 43 хв-1
Звідси:
![]()
Вибираю і призначаю кінематичну схему привода барабана поворотного крана.
Найбільш раціональною схемою є схема:
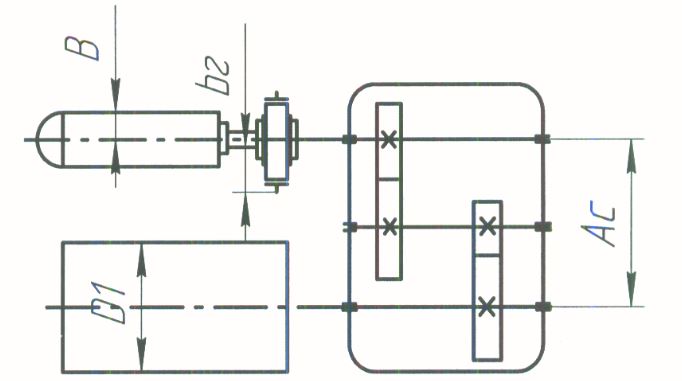
Рисунок 3 - Кінематична схема привода.
Вибираємо типовий редуктор
Основою для вибору редуктора є передаточне число, потужність.
 Я
вибираю редуктор
Ц2 -
250
Я
вибираю редуктор
Ц2 -
250
Для якого: міжосьова відстань Аc = 250 мм
Частота обертання швидкохідного вала nвл = 750
Np = 12,5 кВт - потужність Передаточне число Uр = 24,8
Up > U0 => 24,9 > 20,7
Тип |
Ас |
Аб |
Ат |
А |
A1 |
А2 |
В=В1 |
В2 |
М0 |
М1 |
Lo |
L1 |
L2 |
Ре Редуктора |
ММ |
мм |
мм |
мм |
мм |
мм |
мм |
мм |
мм |
мм |
мм |
мм |
мм |
Ц2-250 |
250 |
100 |
150 |
210 |
75 |
285 |
260 |
167 |
160 |
310 |
525 |
400 |
120 |

Визначаю фактичну швидкість підйому вантажу. Вона розраховується за формулою:
![]() (1,8)
(1,8)
Де ДБ=135мм
Un - передаточне число поліспаста Un = 2
![]() -
фактична частота обертання барабана,
хв.-1
-
фактична частота обертання барабана,
хв.-1
де n - частота обертання вала електродвигуна, хв.-1
UФР - фактичне передаточне число вибраного редуктора
Звідси:
![]()
де
![]()
Визначаю похибку швидкості підйому вантажу, %

 Відхилення
заданої швидкості підйому вантажу від
фактичного значення не має перевищувати
± 5%. В тому випадку, якщо відхилення
більше 5%, збільшую розрахунковий діаметр
барабана, що не підлягає запереченю
умови його визначення Дб
>
1dк.
Шуканий діаметр барабана визначаю по
формулі:
Відхилення
заданої швидкості підйому вантажу від
фактичного значення не має перевищувати
± 5%. В тому випадку, якщо відхилення
більше 5%, збільшую розрахунковий діаметр
барабана, що не підлягає запереченю
умови його визначення Дб
>
1dк.
Шуканий діаметр барабана визначаю по
формулі:
![]() (1,9)
(1,9)
Де UБ=0,3
![]()
Звідси:
![]() 160 мм
160 мм
Звідси частота обертання барабана, хв-1
![]() 35,8
35,8
![]()
Визначивши збільшений діаметр барабана повертаюсь до п.13:

Приймаю UФ- 0,15
Визначаю похибку швидкості підйому вантажу, %
![]()
Отже, діаметр барабана вибрано вірно і він становить ДБ = 160 мм.
Перевіряю можливість з’єднання барабана з валом редуктора за
допомогою вмонтованої зубчатої муфти:
 а) в
залежності від типорозміру вибраного
редуктора, виписую значення ділильної
окружності d,
зубчатої напівмуфти вала редуктора і
модуля значення. Для редуктора Ц2 -
250:
а) в
залежності від типорозміру вибраного
редуктора, виписую значення ділильної
окружності d,
зубчатої напівмуфти вала редуктора і
модуля значення. Для редуктора Ц2 -
250:
dv = 22 мм m = 3.5
б) визначаю товщину обода зубчатої напівмуфти барабана, мм
![]() 2,5
m
=
2.5
• 3.5-8.75 мм (1,10)
2,5
m
=
2.5
• 3.5-8.75 мм (1,10)
в) визначаю посадочний діаметр зубчатої напівмуфти барабана, мм
 Д0
– d1
+
2.5m
+ 2БО
Д0
– d1
+
2.5m
+ 2БО
Д0 = 45 + 8,75 + 2 • 8,75 = 45 + 8,75 + 17,5 = 71,25
г) визначаю товщину стінки барабана по формулі, мм:
![]() = 0,02 + Д + (6.. .10)
= 0,02 + Д + (6.. .10) ![]() 10
(1,12)
10
(1,12)
= 0,02 + 151,7 + 8= 11 > 10
де Д = ДБ -dk= 160-8,3 = 151,7 мм (1,13)
д) визначаю посадочний діаметр барабана, мм
![]() =
Д - 2 •
- (6.. .8) (1,14)
=
Д - 2 •
- (6.. .8) (1,14)
Д0'
= 160-2 ![]() 11 - 7= 131 мм
11 - 7= 131 мм
е) перевіряю виконання умови:
До < До'
Звідси: 71,25 <131 — умова виконується.
Перевіряю можливість компоновки механізму підйому по схемі, що показана на рис.1. Можливість компоновки визначаю наступним чином, мм:
![]() (1,15)
(1,15)
де Ас - сумарна міжосьова відстань вибраного редуктора, Ас = 250 мм (див. п. 13).
b1 - розмір електродвигуна, Ь1 = 133 мм (див. п. 10)
ДБ - діаметр барабана (див. п. 15)
![]() =
160 мм
=
160 мм
dk- діаметр каната (див. п. 6)
![]()
250 > 133 + 80 + 24,9 250 >237,9
250 > 238 мм - умова виконується
Розраховую гальмівний розрахунковий момент за формулою:
![]() (1,16)
(1,16)
 де
кт
-
коефіцієнт
запасу гальмування При легкому режимі
роботи кт
=
1,5
де
кт
-
коефіцієнт
запасу гальмування При легкому режимі
роботи кт
=
1,5
![]() -
момент
на валу електродвигуна при опусканні
номінального вантажу при встановленому
русі:
-
момент
на валу електродвигуна при опусканні
номінального вантажу при встановленому
русі:
![]() (1,17)
(1,17)
Де Q = 25 кН = 2500 кг номінальна вантажопідємність
= 160 мм - розрахунковий діаметр барабана (див. п. 15)
- ККД поліспаста, = 0,98
![]() -
ККД
механізму,
=
0,8,
де
-
ККД
механізму,
=
0,8,
де ![]() =
0,8..
.0,85
=
0,8..
.0,85
UH= 2 — кратність поліспаса
U0- загальне передаточне число привода, U0 = 20,7
![]()
![]()
Тепер
коли відомо момент ![]() можна
знайти гальмівний момент,
можна
знайти гальмівний момент,
![]()
