

Прерывистая передача телефонии
Во всех цифровых стандартах сотовой связи используют технологию прерывистой передачи DTX (Discontinuous Transmission) по выделенному каналу. Это значит, что во время пауз передатчики соответствующих базовых и абонентских станций молчат, что улучшает помеховую обстановку и увеличивает срок действия аккумуляторной батареи мобильной станции.
Для реализации DTX при телефонии используют детекторы активности речи VAD (Voice Activity Detector). Задача VAD состоит в определении активной фазы речи и в передаче вовремя пауз короткого пакета "комфортного шума" для обеспечения естественности восприятия передаваемого сигнала. Блок-схема обработки речевых сигналов при передаче (Transmit Side) и при приеме (Receive Side) показаны на рис. 1.25.
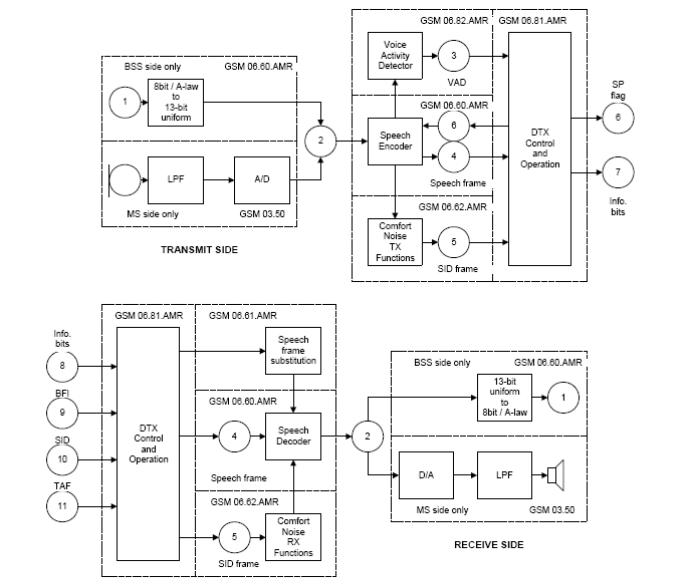
Рис. 1.25. Блок-схемы обработки речевых сигналов
Цифрами на рис. 1.25 помечены:
8-битовый ТФ сигнал после компрессии по А-закону,
13-битовый сигнал ИКМ,
флаг VAD
закодированная сжатая речь (50 кадров/с); число бит в кадре зависит от скорости AMR кодека,
кадр комфортного шума (SID – Silence Descriptor),
TX_TYPE, 2 бита, определяющие, получены ли информационные биты, и если "Да", то какие: речи или комфортного шума,
информационные биты на передачу,
информационные биты с приемника,
RX_TYPE, тип полученного кадра + BFI (Bad Frame Indication),
кадр SID,
В GSM/UMTS используют 2 алгоритма VAD. 1-й ориентирован на кодеки типа CELP (ACELP), второй на более ранние варианты вокодеров, например, RPE-LTP. Рассмотрим, как работает VAD по первому алгоритму, который проиллюстрирован рис. 1.26.
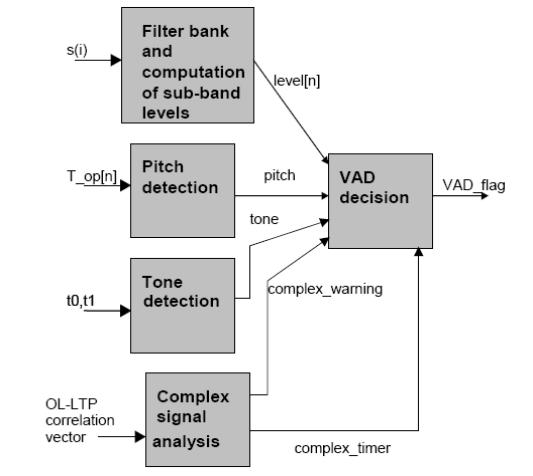
Рис. 1.26. Упрощенная блок-схема алгоритма VAD, вариант 1.
Для каждого 20 мс сегмента речи производят фильтрацию входного сигнала в 9 фильтрах и измеряют уровни сигналов на выходах всех фильтров. Полосы пропускания фильтров приведены в табл. 1. 5.
Таблица 1.5
-
Номер полосы
Граничные частоты, Гц
1
0 250
2
250 500
3
500 750
4
750 1000
5
1000 1500
6
1500 2000
7
2000 2500
8
2500 3000
9
3000 4000
Далее определяют наличие основного тона (Pitch detection) в открытой петле (open loop). Если основной тон присутствует, то выставляют соответствующий флаг.
Tone detection обеспечивает индикацию отдельных тонов, о наличии которых также выставляют флаг. Анализатор комплексного сигнала позволяет обнаружить сложные сигналы, например, музыку. Алгоритм обнаружения сложных сигналов основан на корреляционном анализе в открытой петле.
Главная задача VAD – определить, что идет на передачу в текущем сегменте: речевой сигнал, шум или другие сигналы (отдельные тоны или музыка). Для этого в паузах передачи речи VAD оценивает параметры фонового шума. Паузу в речевом сигнале VAD определяет по мощности сигнала на входе вокодера и по отсутствию основного тона (процедура Pitch detection). При этом уровень фонового шума (мощность) находят, суммируя мощности сигналов на выходах всех полосовых фильтров:
 (1.49)
(1.49)
где bckr_est[n] – уровень фонового шума на выходе каждого фильтра.
Конец паузы и начало активной фазы речи определяют по превышению уровня суммарного сигнала (речь и шум) над уровнем фонового шума. Эту разницу оценивают по отношению
 (1.50)
(1.50)
В (1.50) level[n] – уровень суммарного сигнала на выходе соответствующего фильтра n. Отношение snr_sum должно превышать шумовой порог, зависящий от уровня фонового шума. Чем он выше, тем ниже шумовой порог. Это позволяет выявлять и обрабатывать слабые речевые сигналы на фоне сильных шумов, хотя при этом и увеличивается вероятность обработки сильного шума вместо речи.
Второй признак, обязательный для речевого сигнала – обнаружение в нем основного тона, выполняемое в блоке Pitch detection. В блоках Pitch detection, Tone detection и Complex signal analysis исследуют взвешенные входные сигналы sw(n). Как известно из алгоритма ACELP, в открытой петле определяют ориентировочную задержку фильтра долговременного предсказателя TOP. Если в процессе поиска TOP не удается найти требуемой корреляционной зависимости в течение двух последовательных 20 мс сегментов входного сигнала, то устанавливается pitch flag, а VAD приступает к дополнительному исследованию содержания пришедшего сигнала. VAD выявляет, не содержит ли передаваемый сигнал отдельных тонов (Tone detection) или сложных периодических сигналов (Complex signal analysis). Замена этих сигналов комфортным шумом ухудшает естественность передачи речи.
Во время пауз речи
абонент слышит усредненный фоновый
шум, называемый комфортным шумом. Для
его генерации берут данные из следующих
подряд 8 сегментов входного сигнала
общей длительности 160 мс. Анализируя
этот фрагмент шума, VAD
определяет его спектральные характеристики,
которые представляют в виде 10 составляющих
вектора f
mean
линейных спектральных пар. В памяти
вокодера записаны 8 характерных вариантов
векторов фонового шума.![]() .
VAD
вычисляет ошибку
.
VAD
вычисляет ошибку
 (1.51)
(1.51)
и выбирает вектор по
минимуму
 .
.
Далее VAD формирует кадр SID. В него входит номер вектора (3 бита), 26 бит для передачи квантованной ошибки e(i) в форме соответствующих спектральных пар. Наконец, 6 бит используют для передачи логарифма мощности входного сигнала, подвергнутого предварительной высокочастотной фильтрации.
Таким образом, кадр SID содержит 35 информационных бит. Эти кадры во время пауз в речи передают каждые 480 мс в одном 20мс кадре. Остальное время соответствующий передатчик молчит.
Далее следует вставной раздел, необходимый для выполнения лабораторных работ.
В. Оптимальный прием цифровых сигналов.
Рассмотрим определение отношения сигнал/помеха для того, чтобы рассчитать коэффициент ошибок при приеме двухуровневого цифрового сигнала. Сигнал принимают в условиях шума. При этом логический “0” соответствует уровню А, а приему логической “1” –А. Величина А является критерием правильности приема.
В большинстве случаев из-за множества и сложности процессов, формирующих шум, его можно считать Гауссовым. Тогда плотности вероятности приема “1” и “0” описывают две гауссовские кривые (рис. В1).
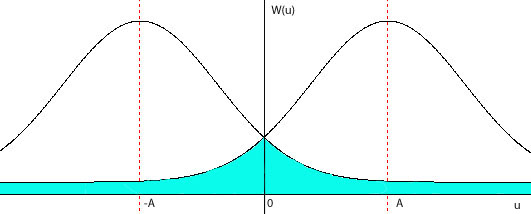
Рис.В1
Вероятность ошибочного приема характеризуют заштрихованные площадки на рис. В1.
Так как прием “1” и “0” равновероятен, т.е. Р [0,1] = ½, то вероятности ошибочного приема BER (Bit Error Rate), или Рош

(В1)
Выполним ряд математических операций для преобразования выражения (В1). Напомним, что

Табулированная функция ошибок

Комплементарная (дополняющая) функция ошибок

Заменим в (В1) переменную интегрирования:
Тогда
 (B2)
(B2)
Мощность шума определяет дисперсия шума. Т.е для белого шума

(B3)
где
N0 – спектральная плотность белого шума;
К (f) – коэффициент передачи фильтра приемника;
Nt(f) – спектральная плотность шума на выходе фильтра приемника.
Подставим (В3) в (В2):
 (B4)
(B4)
Чтобы получить минимальный BER, надо максимизировать величину А. Итак, как оптимально выбрать А? Свяжем величину А с энергией сигнала (Энергией элементарного символа, рис. В2).
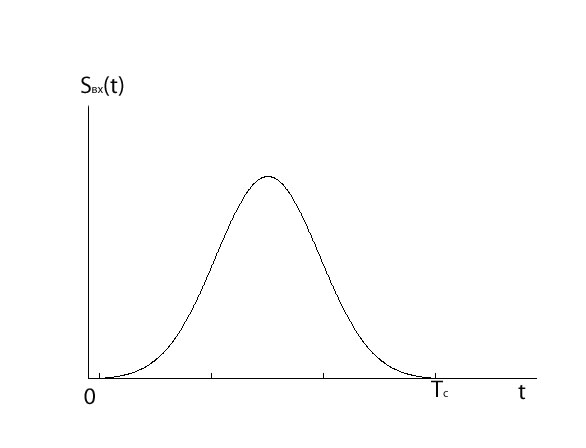
Рис.В2
![]()
(B5)
где Э - энергия символа.

 (B6)
(B6)
Энергию символа можно рассчитать, интегрируя либо по времени, либо по частоте в соответствии с равенством Парсеваля:
 (B7)
(B7)
В выражении (В7) [y(Tc)] – это сигнал на выходе фильтра приемника, который связан с сигналом на входе фильтра соотношением:
 (B8)
(B8)
Для получения min{BER}
надо максимизировать ![]() ,
т.е. максимизировать интеграл (В8). А это
возможно при использовании согласованного
фильтра, т.е. когда
,
т.е. максимизировать интеграл (В8). А это
возможно при использовании согласованного
фильтра, т.е. когда
 (B9)
(B9)
Иначе говоря,

(B10)
В соответствии с неравенством Шварца

Равенство возможно только тогда, когда
![]() ,
т.е.
,
т.е. ![]()
Итак, при наличии оптимального фильтра.
 (В11)
(В11)
Подставляя (В11) в (В4), получим:
 (В12)
(В12)
При оптимальной фильтрации
![]() ,
а функция А, по
которой принимают решение, есть
автокорреляционная функция входного
сигнала S(t).
,
а функция А, по
которой принимают решение, есть
автокорреляционная функция входного
сигнала S(t).
Как результат зависит от полосы и от скорости передачи?
 (В13)
(В13)
где В – скорость передачи,
![]() – полоса сигнала.
– полоса сигнала.