

Формульный метод
Метод используется для быстрой приближенной оценки значений параметров настройки регулятора для трех видов оптимальных типовых процессов регулирования .
Табл. 2 Таблица настройки параметров ФМ.
Закон регулирования |
|
|
|
П |
|
|
|
ПИ |
|
|
|
ПИД |
|
|
|





Где
 – время запаздывания,
– время запаздывания,

Замечание.
Т.к. исследуемый объект практически не
обладает запаздыванием, рассчитанные
значения для
могут быть слишком велики, тогда
рекомендуемое значение можно брать из
диапазона
 .
.
Задание
Ознакомиться с основными законами регулирования и определить временные показатели качества переходного процесса.
Определить основные динамические характеристики исследуемого объекта (постоянную времени
 ,
коэффициент усиления
,
коэффициент усиления
 ,
запаздывание
).
,
запаздывание
).Провести настройку регулятора методом незатухающих колебаний.
Получить график переходного процесса для системы с включенным и настроенным по методу незатухающих колебаний ПИ–регулятором.
Провести настройку регулятора формульным методом.
Получить график переходного процесса для системы с включенным и настроенным формульным методом ПИ–регулятором.
Сравнить полученные переходные процессы и определить оптимальный метод настройки регулятора.
Методические указания
Исследование проводить следующим образом:
- Переключатель перевести в положение inside;
- Нажать на кнопку «PID setting»;
![]()
- Выбрать вид регулирования «Position PID»;
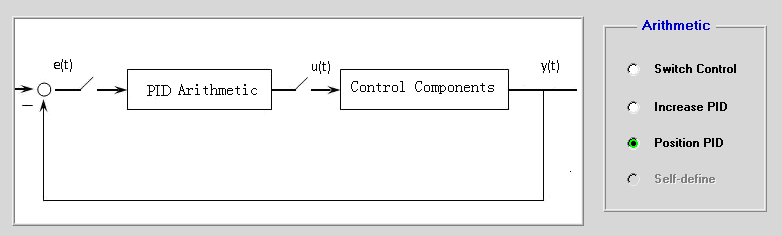
1.4. Определение вида регулирования
- Ввести рассчитанные коэффициенты (Если исследуется, к примеру, П-регулятор, то коэффициенты Ki и Kd нужно оставить равными 0);
- Нажать на кнопку «Confirm» а затем «Return»;
- Начать исследование, нажав на кнопку «Start» (по умолчанию значение заданной скорости вращения двигателя равно 1500 об/мин.) ;
![]()
- По истечении некоторого времени, задать в окне «Rotate velocity» с клавиатуры значение уставки (реализуемый скачок, например 2700 об/мин);
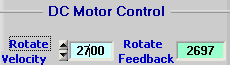
- Подождать, пока процесс установится (приблизительно 1 мин., что равно 6 клеткам по шкале дискрет времени в окне блока Control Components Experiments, 1 клетка = 12 сек. );
- Повторить исследование для каждого регулятора.
Контрольные вопросы
Какие методы классификации ПИД–регуляторов существуют?
Запишите в общем виде описание ПИД–закона регулирования. За что отвечают параметры , , и ?
Какими преимуществами обладает ПИ–регулятор?
Какие основные временные показатели качества переходного процесса вы знаете?
Опишите процесс настройки ПИД–регулятора методом незатухающих колебаний.
Список литературы
Хризолитова С.А., Ягодкина Т.В., Колосов О.С., Бондин О.А. Лабораторный практикум по курсу Основы теории управления» – М.: Издательский дом МЭИ, 2007 – 80 с.
Ziegler J.G., Nichols N.B. Optimum settings for automatic controllers Trans. ASME. 1942. Vol. 64.