

Магнитные усилители
Принцип действия основан на использовании нелинейных магнитных характеристик ферромагнитных материалов (изменения индуктивности рабочей обмотки в зависимости от насыщения ферромагнитного сердечника).
Достоинства МУ: высокая надежность, практически неограниченный срок службы, большая выходная мощность, возможность усиления малых сигналов. Их используют как усилители входных сигналов, поступающих от датчиков и других элементов автоматики, применяют в измерительных устройствах, вычислительных машинах.
Данные устройства подразделяются на нереверсивные (однотактные) и реверсивные (двухтактные).
МУ состоит их замкнутых ферромагнитных сердечников (их бывает обычно 2 или 3) на каждом из которых располагается обмотка. Одна из них является управляющей, а другие рабочими. МУ также называются дроссельными. Данные устройства подразделяются на реверсивные (однотактные) и реверсивные (двухтактные). Катушки могут работать от одно-и трехфазных токов, а выходной величиной может быть переменный, либо постоянный ток. Как правило, рабочая катушка питается, переменным током, а управляющая – постоянным.
Р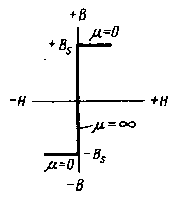
 ассмотрим
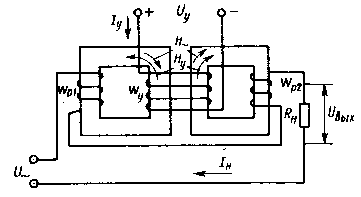
МУ, состоящий из трех сердечников. Его
рабочая часть состоит из двух обмоток
W1 и W2, которые расположены
на крайних сердечниках и подключаются
между собой последовательно и встречно,
либо встречно-параллельно. Чаще
подключение последовательное.
Сопротивление нагрузки Rн
подключается в цепь либо последовательно
рабочим обмоткам, либо (реже) параллельно
им. Обмотка управления WУ,
расположенная на среднем сердечнике,
обеспечивает его подмагничивание.
Следовательно, от изменения тока в ней
будет зависеть ток в рабочих обмотках
и цепи нагрузки, а также выходное
напряжение, т.е.
ассмотрим
МУ, состоящий из трех сердечников. Его
рабочая часть состоит из двух обмоток
W1 и W2, которые расположены
на крайних сердечниках и подключаются
между собой последовательно и встречно,
либо встречно-параллельно. Чаще
подключение последовательное.
Сопротивление нагрузки Rн
подключается в цепь либо последовательно
рабочим обмоткам, либо (реже) параллельно
им. Обмотка управления WУ,
расположенная на среднем сердечнике,
обеспечивает его подмагничивание.
Следовательно, от изменения тока в ней
будет зависеть ток в рабочих обмотках
и цепи нагрузки, а также выходное
напряжение, т.е.
Uвых = f(Uдр) или Iн = f(Iу).
При анализе работы МУ для получения статических характеристик обычно рассматривают идеальное устройство, имеющее следующую характеристику намагничивания
В = (Н ), ограниченную тремя прямыми,
где Н – напряжение магнитного поля;
В - магнитная индукция;
Вs - ндукция насыщения.
Т.е. при Н = 0, и, следовательно, индуктивность рабочих обмоток L ∞. Скорость изменения магнитной индукции dBdH ∞, а B Bs. В этом случае Iн = 0. Когда Н 0, = 0 и L = 0 и тогда dBdH= 0, а
B=Bs. При этом Iн ∞.
Рассмотрим работу МУ при Iy = 0, когда нагрузка носит активный характер, сопротивление цепи управления мало, т.е. Rу Rр + Rн и R 0. Магнитные потоки Ф1 и Ф2, создаваемые намагничивающими силами переменного тока направлены (в среднем сердечнике) навстречу друг другу и компенсируют друг друга, что исключает наведение здесь ЭДС переменного тока. Т.е. при подаче к рабочей цепи напряжения, которое меняется по синусоидальному закону U = Um sint, оба сердечника будут перемагничиваться. Индукции в них равны и будут изменяться по синусоидальному закону В1 = В2 = Вmsin(t - 2). При этом параметры усилителя выбирают так, чтобы Bm Bs. Следовательно, магнитная проницаемость и индуктивность рабочих катушек L велика, оба сердечника ненасыщенны и напряжение будет полностью приложено к рабочим обмоткам, а, следовательно, Iн = 0. В реальных МУ при Uу = 0 в рабочих обмотках протекает ток холостого хода.
При наличии входного сигнала магнитодвижущая сила Iywy создает в сердечниках постоянную составляющую индукции B0, которая в каждый полупериод подмагничивает один и размагничивает другой сердечник. Тогда индукции в сердечниках
В1 = - Вmcost + B0 ; (1,2)
В2 = - Вmcost - B0 ,
а, результирующая индукция В1 - В2 = 2В.
В начальный момент при t = 0
В1 = - Вm + B0 - первый сердечник размагничивается,
В2 = - Вm - B0 = Вs - а второй вступает в насыщение.
Это ведет к резкому уменьшению и L, ЭДС в рабочих обмотках наводиться не будет, и все напряжение источника питания будет приложено к нагрузке. Это приводит к скачкообразному возникновению тока в выходной цепи, уменьшающемуся к концу полупериода. В дальнейшем индукция будет изменяться по (1,2) и в следующем полупериоде все повторится, но при этом в насыщение будет входить другой сердечник. При насыщении сердечника индукция в нем не будет изменяться до конца полупериода.
Увеличение Iy вызывает увеличение постоянной составляющей индукции B0 в сердечниках и поэтому насыщение в ФМС наступает раньше, а длительность периода насыщения в течении которого протекает ток нагрузки увеличивается. Это обуславливает изменение среднего значения тока Iн, т.е. выходного сигнала.
Характеристики МУ:
I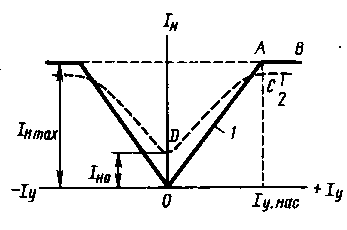 .
Установившийся режим:
.
Установившийся режим:
А. Статическая характеристика
1 – идеальная
2 – реальная
Кривая 1:
- точка О – режим холостого хода (Iу = 0 и Iн = 0);
- участок ОВ – рабочий режим (0 Iн Iнmax при 0 Iу Iунас):
1) участок ОА – управляемый (0 Iн Iнmax при 0 Iу Iунас)
![]() ;
;
![]() ;
;
2) участок АВ – насыщения (Iн = Iнmax = const при Iу Iунас)
Б. коэффициенты усиления:
– по
току
![]() ;
;
– по
напряжению
![]() ;
;
– по
мощности
 ;
;
В.
КПД
![]() ;
;
II. Переходный режим.
А. Дифференциальное
уравнение
![]() ,
,
где
![]() ,
- частота питающего напряжения.
,
- частота питающего напряжения.
Б.
Передаточная функция
![]() ,
,
где
![]() - время запаздывания (время от начала
подачи сигнала
- время запаздывания (время от начала
подачи сигнала
до момента насыщения сердечника),
Sc – поперечная площадь сердечника.
МУ
характеризуются также по величине
«добротности»,
связывающей статические и динамические
характеристики
![]() .
.
Т.к. = const , следовательно, D = f().