

1.5.5. Стійкість сар і методи її дослідження
САР називається стійкою, якщо будучи виведеною із стану рівноваги дією, що збурює або управляє, після закінчення цієї дії повертається до колишнього положення рівноваги, або переходить в кінцеву область, що примикає до цього положення.
У теорії дослідження перехідних процесів прийнятий метод представлення шуканої часової величини X(t) у вигляді суми двох складових: примушеної і вільної:
X(t)= Xпр(t)+ Xв(t)
Примушена складова – це стале значення вихідної величини після закінчення перехідного процесу. Ця складова цілком визначається зовнішньою дією і не впливає на стійкість САР.
Вільна складова – власне перехідний процес. Ця складова визначається тільки властивостями системи і не залежить від дії. Наприклад, для аперіодичної перехідної характеристики примушена і вільна складові матимуть вигляд:

Рис. 1.20. Приклад розкладання перехідного процесу на примушену і вільну складові
Як видно з рис. 1.20, примушена складова в даному випадку – постійна величина, яка дорівнюється заданому значенню, а вільна складова – експонента, прагнуча до нуля з часом.
Очевидно, що в загальному випадку САР буде стійкою, якщо вільна складова має затухаючий характер. Тому для аналізу стійкості САР достатній аналіз лівої частини диференціального рівняння, що описує її:
![]() (1.5.17)
(1.5.17)
і відповідного йому характеристичного рівняння:
![]() (1.5.18)
(1.5.18)
Рішення диференціального рівняння (1.5.17) з використанням перетворення Лапласа має вигляд:
![]() , (1.5.19)
, (1.5.19)
де pk – корені характеристичного рівняння (1.5.18), Ck – постійні інтегрування, які визначаються за початковими умовами.
Якщо
серед коренів є комплексні виду pk
=
α
jω,
то у виразі (1.5.19) з'являються складові
вигляду
![]() .
Наприклад, якщо характеристичне рівняння
третього порядку має 2 речовинних і 1
комплексний корінь, вільна складова
відповідно до (1.5.19) матиме вигляд:
.
Наприклад, якщо характеристичне рівняння
третього порядку має 2 речовинних і 1
комплексний корінь, вільна складова
відповідно до (1.5.19) матиме вигляд:
![]() ,
,
де p1, p2 – речовинні корені, α3, ω3 – речовинна і уявна частини третього кореня;
С1, С2, С3, ψ – постійні, які визначаються за початковими умовами.
За визначенням стійкості з часом (тобто, при t→∞) вільна складова повинна затухати. Аналіз виразу (1.5.19) показує, що для цього корені характеристичного рівняння повинні відповідати наступним умовам:
- всі речовинні корені повинні бути негативними;
- речовинна частина всіх комплексних коренів повинна також бути негативною.
Хоча застосування сучасних засобів обчислювальної техніки дозволяє здійснити пряме вирішення характеристичного рівняння високих порядків, в теорії автоматичного управління відомі методи дослідження стійкості без прямого його вирішення. Це так звані критерії стійкості Гурвіца, Найквіста, Міхайлова і деякі інші (див. /1/).
1.6. Оптимізація перехідного процесу в сар з об'єктом регулювання типу «аперіодична ланка із запізнюванням»
До таких об'єктів відносяться багато промислових установок (нагрівальна піч і багато установок, пов'язаних з процесами нагріву і охолоджування, і т.д.). Структурна схема САР в цьому випадку має вигляд:
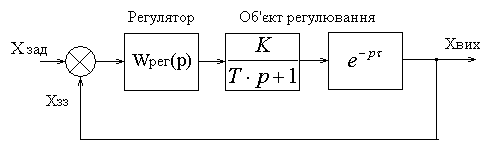
Рис. 1.21. Структурна схема САР
Об'єкт регулювання відповідно до п. 1.3.2 характеризується статичним коефіцієнтом передачі К, постійною часу Т і часом запізнювання .
Вибір типу регулятора і його настройок визначається технологічними вимогами до якості регулювання. При цьому використовують приведені в літературі (наприклад, /1/, с.216) методики вибору, засновані на детальному математичному аналізі. У основі вибору лежить величина відношення /Т:
/Т |
<0,2 |
0,2...1 |
>1 |
Тип регулятора |
Релейний (позиційний) |
Неперервний (П, ПІ, ПІД) |
Імпульсний |
Релейний
регулятор можна застосовувати за
відсутності жорстких вимог до якості
регулювання. У іншому випадку, навіть
при співвідношенні /Т
<0,2 необхідно вибирати один з безперервних
регуляторів. Вибір типу регулятора
можна вести з використанням номограм,
приведених в довідковій літературі
(наприклад, рис. 10.8 – 10.10 у /1/). При виборі
типу регулятора задаються бажаним видом
перехідного процесу і основними
параметрами регулювання – статичною
і динамічною помилками, а також часом
регулювання. Прийняті наступні види
перехідного процесу, для яких проведені
відповідні розрахунки параметрів:
аперіодичний з мінімальним часом
регулювання, коливальний з 20%
перерегулюванням і коливальний з
мінімальною середньоквадратичною
помилкою (тобто
![]() ).
Настройки регуляторів різних типів для
цих випадків наведені в таблиці 1.6.1.
).
Настройки регуляторів різних типів для
цих випадків наведені в таблиці 1.6.1.
Таблиця 1.6.1
Типові настройки регуляторів
Тип регулятора |
Настройка на перехідний процес: |
||
Аперіодичний |
20% перерегулювання |
|
|
П |
|
|
|
ПІ |
|
|
|
ПІД |
|
|
|