

1.4.2. Пропорційний (п) регулятор
Цей регулятор уявляє собою підсилювач сигналу розузгодження і описується виразом:
![]() , (1.4.2)
, (1.4.2)
де Кр – коефіцієнт підсилювання регулятора.
Статична характеристика регулятора має вигляд:
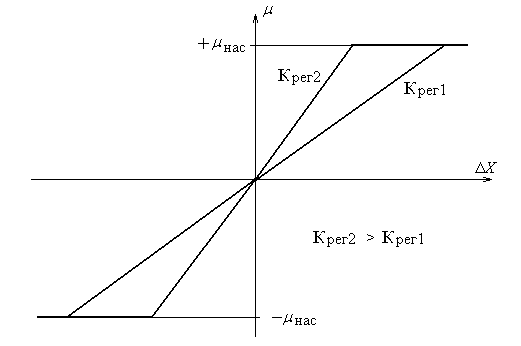
Рис. 1.12. Статична характеристика пропорційного регулятора
Розглянемо процеси в САК з П-регулятором в сталому режимі. Структурна схема САК в цьому випадку матиме вигляд:
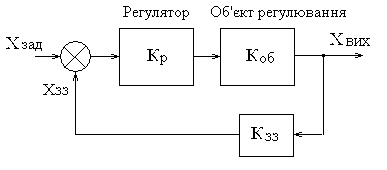
Рис. 1.13. Структурна схема САК з П-регулятором для сталого режиму
Відповідно до рис. 1.13 вихідна величина дорівнює:
![]() , (1.4.3)
, (1.4.3)
де ![]() ,
тоді
,
тоді
![]()
Перетворимо:
![]() ,
,
Звідки
 (1.4.4)
(1.4.4)
При точній рівності вихідної величини заданому значенню
![]() ,
або
,
або
![]() ,
звідки
,
звідки
![]() (1.4.5)
(1.4.5)
Порівняння виразів (1.4.4) і (1.4.5) показує, що в системі з П-регулятором в сталому режимі вихідна величина буде завжди менше заданого значення, тобто система з П-регулятором має помилку в сталому режимі і являється статичною. З виразу (1.4.4) видно, що помилка тим менше, чим вище коефіцієнт підсилення регулятора. Однак надмірне зростання коефіцієнта підсилення регулятора може привести до нестійкості системи.
Застосування П-регулятора вимагає і забезпечення можливості плавного (безперервного) регулювання подачі енергії в об'єкт регулювання. Наприклад, САР температури в нагрівальній печі з П-регулятором може бути виконана по наступній структурі:
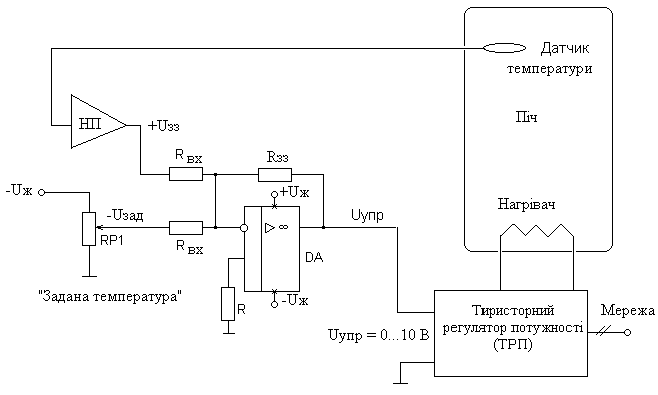
Рис. 1.14. САР з пропорційним (П) регулятором
Відмінність САР по рис. 1.14 від САР з позиційним регулятором (рис. 1.9) полягає в побудові регулятора на ОП DA, а також застосування тиристорного регулятора потужності (ТРП), що дозволяє плавно міняти потужність нагрівача, замість силового комутатора. Типова статична характеристика ТРП описується виразом:
Pнагр = Ктрп*Uупр, (1.4.6)
де Ктрп, Вт/В – коефіцієнт передачі
Uупр, В – напруга, що подається на вхід керування ТРП. Звичайно Uупр міняється в межах від 0 до 10 В (номінальне значення напруги керування).
Регулятор в даному випадку є інвертуючим підсилювачем з підсумовуванням вхідних сигналів, що описується виразом:
![]() ,
(1.4.7)
,
(1.4.7)
де Кр = Rзз/Rвх – коефіцієнт підсилення регулятора.
Наприклад, хай САР має основні параметри, описані в п. 1.4.1, ТРП має коефіцієнт передачі Ктрп = 100 Вт/В, коефіцієнт підсилення регулятора Кр = 20, а потужність, необхідна для досягнення деякої заданої температури дорівнює Pнагр1 = 600 Вт. Тоді відповідно до (1.4.6) напруга на виході регулятора повинна дорівнювати
Uупр = Pнагр1/ Ктрп = 600/100 = 6 В.
Відповідно до (1.4.7) різниця напруг на вході регулятора буде дорівнюватись:
![]() ,
що в прийнятому масштабі представлення
температури складе величину U/mt
= 0,3 В/0,01
В/°С = 30°С
-
статична похибка регулювання (наприклад,
при заданій температурі 800°С фактично
буде 770°С).
,
що в прийнятому масштабі представлення
температури складе величину U/mt
= 0,3 В/0,01
В/°С = 30°С
-
статична похибка регулювання (наприклад,
при заданій температурі 800°С фактично
буде 770°С).
1.4.3. Пропорційно-інтегральний (пі) регулятор
Пропорційно-інтегральний (ПІ) регулятор на додаток до пропорційної складової сигналу розузгодження має і інтегральну:
![]() , (1.4.8)
, (1.4.8)
де Кп – коефіцієнт передачі (підсилення) пропорційної частини;
Ті – постійна часу інтегральної частини.
ПІ-регулятор не має статичної характеристики, оскільки інтегральна складова призводить до безперервної зміни вихідного сигналу при незмінному вхідному. Перехідна характеристика ПІ-регулятора має вигляд:
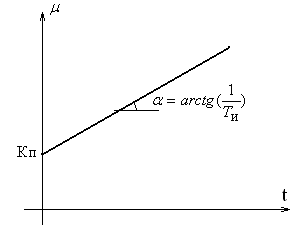
Рис. 1.15. Перехідна характеристика ПІ-регулятора
Наявність інтегральної складової в регуляторі призводить до того, що його вихідний сигнал змінюється до тих пір, поки величина розузгодження не стане рівною нулю. Це означає, що САР з таким регулятором в сталому режимі не має статичної помилки, тобто являється астатичною. Таким чином, долається основний недолік систем з П-регулятором.
Один з варіантів реалізації ПІ-регулятора на ОП:
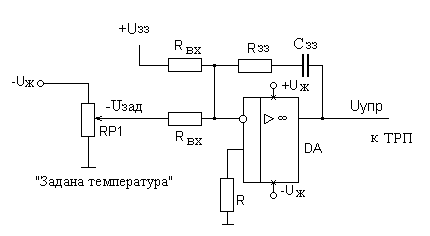
Рис. 1.16. Схемна реалізація ПІ-регулятора
На рис. 1.16 показаний фрагмент САР, аналогічної рис.1.14, де в коло зворотного зв'язку ОП доданий конденсатор Сзз. Параметри такого регулятора визначаються співвідношеннями:
Кп = Rзз/Rвх, Ті = Rзз* Сзз (1.4.9)
Система з ПІ-регулятором в більшості випадків забезпечує хорошу якість регулювання, проте для об'єктів з великою постійною часу має невисоку швидкодію. (В цьому випадку з міркувань стійкості коефіцієнт пропорційного підсилення вибирається невеликим, а постійна часу інтегрування – великою). Поліпшити швидкодію можна, додавши в регулятор диференціальну складову.