

3.3. Розрахунок коливних параметрів та побудова характеристики підвіски
Пружна характеристика підвіски – це залежність вертикального навантаження на колесо від деформації підвіски, виміряної над колесом. Для побудови пружної характеристики підвіски необхідно розрахувати її коливні параметри, окремі із яких є характерними точками характеристики, а саме:
статичний прогин підвіски fcт та статичне навантаження Gcm, що йому відповідає;
динамічний прогин підвіски fд та динамічне навантаження Ggmax, що йому відповідає.
Вигляд
необхідної характеристики підвіски
зображений на рис. 3.3.1. Статичний прогин
підвіски![]() визначається із умови забезпечення
необхідної плавності ходу, яка оцінюється
частотою власних коливань wn:
визначається із умови забезпечення
необхідної плавності ходу, яка оцінюється
частотою власних коливань wn:
![]() . (3.3.1)
. (3.3.1)
Оптимальні значення частоти власних коливань, які організм людини сприймає добре або задовільно, приймають такими, що дорівнюють: для легкових автомобілів – 0,8...1,2 Гц; для автобусів – 1,0...1,3 Гц; для вантажних автомобілів – 1,2...1,9 Гц.
Статичне навантаження:
![]() ,
,
тут
![]() –
осьове навантаження,
–
осьове навантаження,
![]() –
вага непідресорених частин. Динамічне
навантаження, яке сприймає підвіска
при її максимальному динамічному
прогині, не повинно спричиняти взаємного
дотику металічних поверхонь підресорених
і непідресорених частин, тобто спричиняти
"пробій" підвіски.
–
вага непідресорених частин. Динамічне
навантаження, яке сприймає підвіска
при її максимальному динамічному
прогині, не повинно спричиняти взаємного
дотику металічних поверхонь підресорених
і непідресорених частин, тобто спричиняти
"пробій" підвіски.
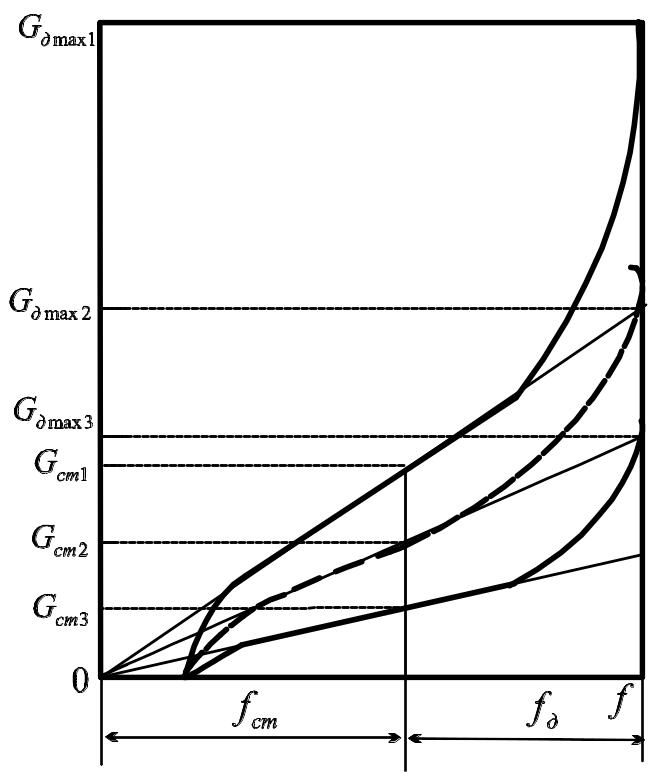
Рис. 3.3.1. Пружна характеристика підвіски
Величина
максимального динамічного навантаження,
яке сприймає підвіска, характеризується
коефіцієнтом динамічності kд
=
Gg
max/Gcт.
Значення коефіцієнта динамічності: для
легкових автомобілів kд
= 1,75...2,2; для автобусів kд
= 2,0...2,5; для вантажних автомобілів
загальнотранспортного призначення kд
=
2,5...3,0; для автомобілів підвищеної
прохідності kд
= 3,0...3,5. Динамічний прогин по відношенню
до статичного в більшості конструкцій
підвісок становить: в легкових автомобілях
![]() ,
в автобусах
,
в автобусах
![]() ,
у вантажних автомобілях
,
у вантажних автомобілях
![]()
Обмежують
динамічний прогин з метою зменшення
максимального переміщення кузова
відносно коліс, що знижує вимоги до
напрямного пристрою підвіски, полегшує
умови роботи кермового приводу, збільшує
стійкість автомобіля. З цією ж метою
обмежується також прогин підвіски на
ході відбою![]() .
.
Кількісною характеристикою здатності підвіски сприймати динамічні навантаження без "пробоїв" є її динамічна ємність, під якою розуміють роботу, яку необхідно затратити, щоб деформувати підвіску на повну величину, яку допускають обмежувачі ходу. В загальному випадку динамічну ємність розраховують за формулою
де
![]() – функція, що описує характеристику
підвіски.
– функція, що описує характеристику
підвіски.
Вже згадані обмеження на характеристику підвіски зумовлюють необхідність її нелінійності. Необхідність нелінійності характеристики підвіски обумовлюється також зміною корисного навантаження від нуля до максимуму, яке спричиняє значну зміну навантаження на підвіску, що становить: 10...30 % по передній і 45...60 % по задній підвісках легкового автомобіля, 200...250 % в автобусах, 250...400 % у вантажних автомобілях.
Жорсткість
підвіски, яка є першою похідною від
функції![]() ,
що описує характеристику підвіски, є
непостійною. У розрахунках найчастіше
використовується статична жорсткість
підвіски
,
що описує характеристику підвіски, є
непостійною. У розрахунках найчастіше
використовується статична жорсткість
підвіски
![]() . (3.3.2)
. (3.3.2)
Нелінійність характеристики підвіски досягають різними способами. Нелінійну характеристику мають пневматичні та гідропневматичні пружні елементи. Здебільшого нелінійність досягається використанням в підвісці крім основного, інших пружних елементів, навіть тоді, коли основний елемент має нелінійну характеристику. Нелінійності одного пружного елементу недостатньо для одержання достатньої нелінійної характеристики всієї підвіски. Дуже часто використовується підвіска, яка складається з двох пружних елементів – основної ресори та додаткової (підресорника). Характеристика такої підвіски є кусково-лінійною. Точка перетину характеристики відповідає моменту входження у роботу підресорника, який рекомендується вибирати на ході f’д = (0,4...0,6)fд.
Для отримання нелінійності характеристики підвіски на ходах, близьких до максимальних, використовуються буфери: стиску майже в усіх автомобілях і відбою в автомобілях з підвіскою малої жорсткості. Навантаження, яке припадає на буфер стиску від підресорених мас при максимальному ході підвіски, дорівнює
![]() (3.3.3)
(3.3.3)
де
![]() – максимальне зусилля, яке сприймається
пружними елементами підвіски.
– максимальне зусилля, яке сприймається
пружними елементами підвіски.