

Синхронизация в цифровых иис.
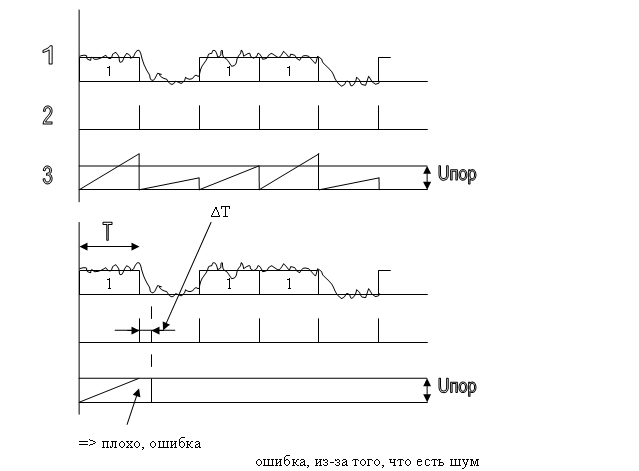
Рисунок 43
– исходный сигнал. Надо регенерировать. Знаем где начало и конец символа.
– какие-то пометки (служебные сигналы).
– интегрируем. В одном символе ошиблись (вместо 1 приняли

Рисунок 44
а) – ∆Т=0, если при выше Uпор., то ”1”, если ниже, то ”0”
б) – Т/2>∆Т>0; уровень “0” и ”1” сместился из-за использования неточной синхронизации импульсами
в) – Т/2=∆Т; уровни ”0” и ”1” слились, ничего не разобрать.
∆Т – ошибка синхронизации.
Нужно знать, где начало и конец импульсов.
Способы регенерации сигналов тактовой синхронизации (выделение тактового синхросигнала)
(1) – Старт-стопная синхронизация;
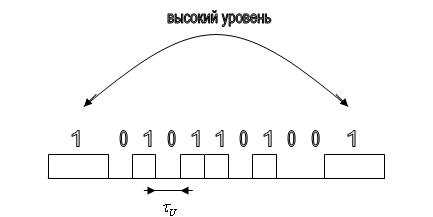
Рисунок 45
передаём 8 символов (байт)
Тот, кто передаёт, находится в состоянии высокого уровня. Переход с этого длительного состояния высокого уровня на низкий уровень – сигнал того, что сейчас пойдёт байт. После байта – снова высокий уровень.
![]() -
длительность импульса известна заранее.
-
длительность импульса известна заранее.
Информация передаётся пакетами (сколько байтов).
Длина посылки (пакета):
Генератор на приёмной частоте должен обнаружить начало и конец импульсов, но из-за нестабильности он ошибается с течением времени => такая синхронизация не очень устойчива, при длительных пакетах возникает и накапливается ошибка.
(2) – Синхронизация при помощи пилот-сигнала.
Для системы последовательность 0 и 1 хаотична.
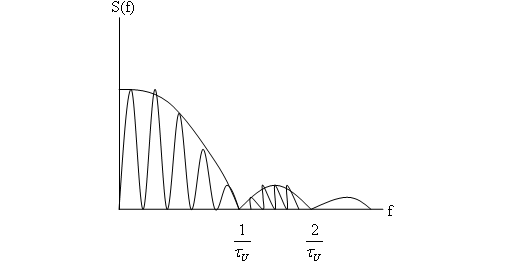
Рисунок 46
Передаём вместе с 0 и 1 гармонический сигнал известный и стабильный, который будет использоваться для синхронизации, он связан с частотой следования символа.
Fсинх - частота синхронизации, д.б. постоянна и д.б. связана жёстко с 1/
В момент 2/ ставим гармонический сигнал. Чем дальше его поставим, тем меньше энергия, которая может помешать его выделить.
На приёмной стороне ставим узкополосный фильтр с АЧХ фильтра, частоту делим на 2 и получаем частоту сигнала
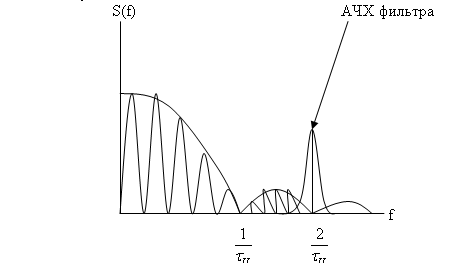
Рисунок 47
(+) – синхронизация с пилот-сигналом обладает высокой помехоустойчивостью. Узкополосный фильтр отсекает помехи.
(-) – надо затрачивать энергию на передачу синхросигнала:
(-) – выделяется специальный канал для передачи синхросигнала.
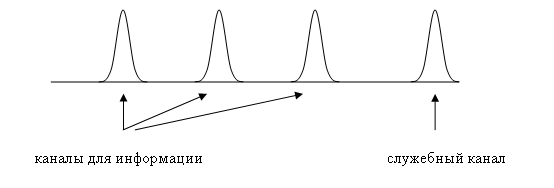
Рисунок 48
(3) – Замешивание синхросигнала в информационный сигнал.
Инерциальный способ
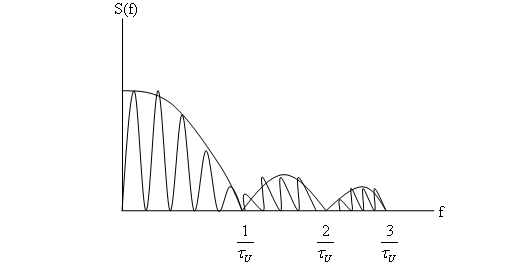
Рисунок 49
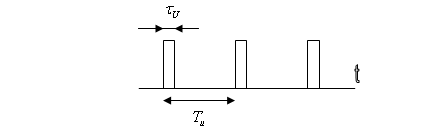
Рисунок 50

Рисунок 51
Tu – период следования импульсов
Через интервал Tu появляется импульс, неинформационная “единица”.
Через Tu снова появилась 1:
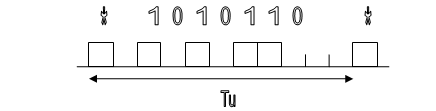
Рисунок 52
Тогда на фоне сплошного спектра появится линейчатый => знаем, где максимальные спектральные составляющие (знаем 1/Tu) => можем там поставить фильтры и выделить служебные спектральные составляющие.
Множество фильтров включены последовательно:
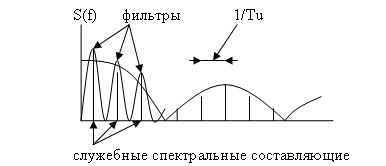
Рисунок 53
Реализация такой схемы: сигнал (1,0) и замешанный в нём служебный поступают на умножитель (логическое умножение). Если импульсы с генератора появляются в тот момент, когда появляется *, то на выходе появляется 1.
Применение синхрокодов.
з акончилось
информативное началось
информативное
акончилось
информативное началось
информативное
слово слово
τи N=11
Рисунок 54
k(t)=∫u(t)dt*u(t-τ)dt – свертка (дает автокорреляционную функцию)
В тот момент, когда этот синхрокод максимально совпадет с тем синхрокодом, который запомнен в регистре, будет зафиксирован «всплеск».
k (t)
– коэффициент корреляции
(t)
– коэффициент корреляции
Kmax Ko
Рисунок 55
Kmax/ Ko = n – количество разрядов в синхрокоде
С истема
ФАП – фазовой автоподстройки
истема
ФАП – фазовой автоподстройки
Рисунок 56