

Задание 4
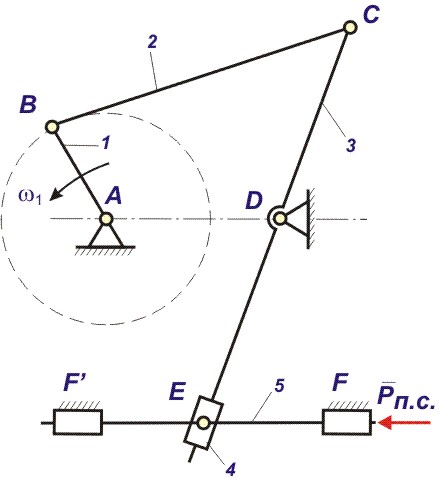
Рис. 8.4
Таблица 8.4
Параметр |
Единица измерения |
Вариант |
|||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
||
Коэффициент изменения средней скорости выходного звена, K |
- |
1.3 |
1.25 |
1.2 |
1.3 |
1.35 |
1.5 |
1.25 |
1.4 |
1.35 |
1.45 |
Расстояние между крайними положениями выходного звена, H |
мм |
90 |
100 |
95 |
105 |
100 |
100 |
100 |
90 |
100 |
110 |
Частота вращения ведущего звена, n1 |
об/мин |
490 |
420 |
410 |
500 |
600 |
500 |
580 |
480 |
500 |
500 |
Сила полезного сопротивления, Pп.с. |
Н |
400 |
500 |
600 |
700 |
450 |
550 |
640 |
750 |
550 |
850 |
Примечание:
Принять между крайними положениями коромысла CDE (звено №3) угол = 50-70.
Задание 5
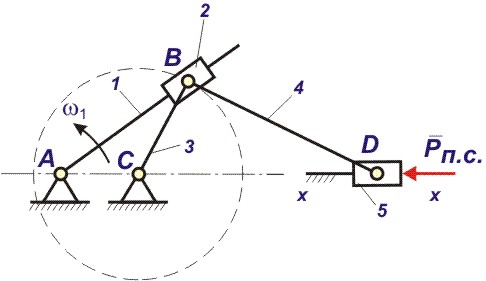
Рис. 8.5
Таблица 8.5
Параметр |
Единица измерения |
Вариант |
|||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
||
Расстояние между крайними положениями выходного звена, H |
мм |
120 |
140 |
150 |
100 |
130 |
105 |
110 |
110 |
80 |
100 |
Частота вращения ведущего звена, n1 |
об/мин |
200 |
210 |
240 |
260 |
300 |
300 |
210 |
490 |
240 |
420 |
Сила полезного сопротивления, Pп.с. |
Н |
600 |
700 |
750 |
650 |
500 |
650 |
800 |
900 |
720 |
700 |
Примечание:
1) Принять соотношение
длин звеньев
![]() ;
;
2) Принять соотношение
длин звеньев
![]() .
.
Задание 6
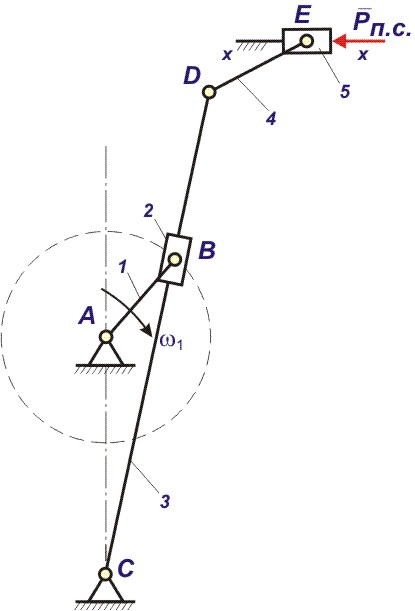
Рис. 8.6
Таблица 8.6
Параметр |
Единица измерения |
Вариант |
|||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
||
Коэффициент изменения средней скорости выходного звена, K |
- |
1.4 |
1.3 |
1.5 |
1.45 |
1.4 |
1.6 |
1.6 |
1.55 |
1.65 |
1.9 |
Расстояние между крайними положениями выходного звена, H |
мм |
150 |
160 |
160 |
140 |
160 |
200 |
105 |
190 |
100 |
110 |
Частота вращения ведущего звена, n1 |
об/мин |
600 |
450 |
300 |
400 |
340 |
550 |
400 |
530 |
480 |
320 |
Сила полезного сопротивления, Pп.с. |
Н |
600 |
650 |
600 |
700 |
640 |
650 |
820 |
750 |
710 |
600 |