

Структура и геометрия манипуляторов
Структура кинематических цепей довольно разнообразна и различается числом звеньев видами и расположением кинематических пар с различной подвижностью. Наиболее распространенным являются следующие схемы (рис. 3, а - г).
В
(Рис.3) Схема
копирующего манипулятора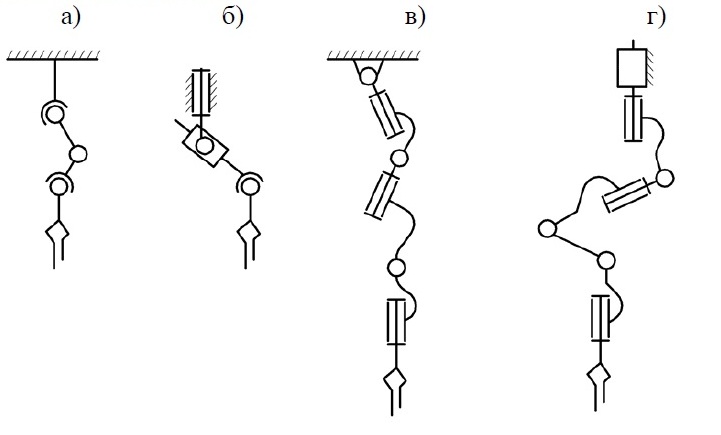
Маневренность
манипулятора – это число степеней
свободы кинематической цепи при
неподвижном захвате. Например, манипулятор
по схеме рис. 3, а имеет m = 1; по схеме на
рис. 3, б, в – m = 0. Повышение маневренности
позволяет выполнять более сложные
движения и увеличивает свободу действий
оператора при управлении. Фактически,
маневренность равная единице означает,
что к заданной точке в заданном направлении
схват может п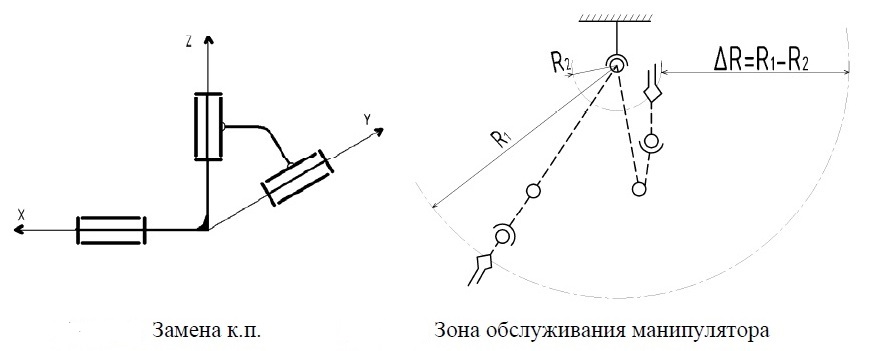 одойти
при различных положениях остальных
звеньев.
одойти
при различных положениях остальных
звеньев.
(Рис.4)
Часть рабочего
объема, в котором можно выполнять
операции с объектом манипулирования,
называют зоной
обслуживания, или
рабочей
зоной. Так
для манипулятора по схеме на рис. 3, а
рабочая зона – пространство между
сферами радиуса R1
и R2
(теоретически) (рис. 4). Практически, это
часть пространства, определяемая
конструкцией манипулятора. Каждая точка
рабочей зоны характеризуется т. н. углом
сервиса ψ –
это некоторый телесный угол внутри
которого схват может подойти к этой
точке (мерой телесного угла является
площадь, вырезаемая им на сфере единичного
радиуса, с центром в вершине, а сам угол
– это часть пространства, ограниченная
прямыми, проведенными из одной точки
(вершины) по всем точкам какой-либо
замкнутой кривой). Отношение ![]() называется коэффициентом сервиса,
значение которого может
называется коэффициентом сервиса,
значение которого может
Изменяться ![]() (рис. 5). По графикам θ(R)
оценивают возможности той или иной
кинематической схемы манипулятора.
(рис. 5). По графикам θ(R)
оценивают возможности той или иной
кинематической схемы манипулятора.
К техническим показателям, характеризующим манипуляторы и промышленные роботы, относятся также: грузоподъемность, быстродействие, точность позиционирования, (определяемая разбросом положений руки ПР при выполнении одной операции) энергетические затраты.
(Рис.5)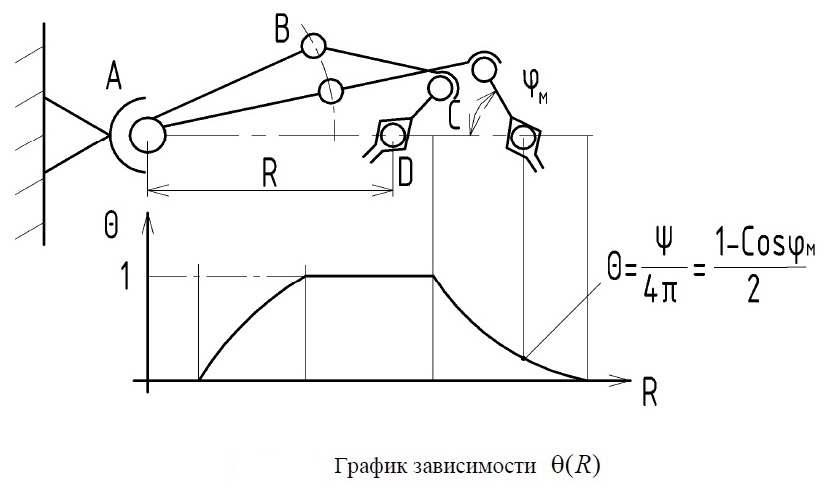
Механика промышленных роботов
Кинематическая структура и двигательные возможности ПР определяются видом и последовательностью расположения кинематических пар. Обычно различают глобальные, региональные и локальные движения. Наличие возможности глобального перемещения обеспечивает мобильность робота, в противном случае он стационарен.
Региональные движения относятся к внутриоперационным, а локальные
обеспечивают ориентацию и точность позиционирования. Использование различных комбинаций кинематических пар 5-го класса позволяет получать схемы ПР, работающих в прямоугольной, цилиндрической, сферической рабочих зонах (рис. 6). Основным требованием при выборе варианта схемы
м
(Рис.6)
Анализ возможных компоновок ПР позволяет обосновать обобщенную структуру манипуляционной системы, состоящую из следующих основных элементов (модулей): основание; колонна, закрепленная на основании; рука (руки), крепящаяся к колонне; кисть,
крепящаяся к руке; технологические механизмы, крепящиеся к кисти; захватные устройства или другие рабочие органы, крепящиеся к кисти. Для подвижных ПР добавляется тележка напольного или подвесного исполнения.
Для быстрой переналадки требуются унифицированные элементы сопряжения в соединениях «рука – кисть – технологический механизм –
захватное устройство», что позволяет изымать промежуточные элементы, не требующиеся в конкретном случае. Модульный принцип, или принцип агрегатирования позволяет формировать робот из законченных машинных агрегатов, содержащих как обычные приводные устройства и механизмы, так и энергетические и информационные. Каждый модуль обеспечивает одну или несколько степеней подвижности робота. В частности комбинация из трех модулей прямолинейного перемещения позволяет получать компоновку робота РПМ-25, работающего в декартовой системе координат. Использование модуля вращения дает компоновку с рабочей зоной в цилиндрических координатах, а при использовании модуля качения получаем компоновку в сферической системе координат. Число комбинаций модулей достигает 100 и более. В модулях используются различные винтовые передачи, червячно-зубчатые редукторы высокой точности (безлюфтовые), самотормозящие муфты дискового типа и т. д. Привод основных движений – электрический с обратной связью по положению и скорости.
Управление – тиристорное. Привод операционных механизмов – пневматический.