

§2. Классификация и способы реализации структур адаптивных систем управления.
Первые сведения об АдСУ появились в литературе в середине прошлого века.[5,12,13,15,14]. В основном это были несложные системы с несложными объектами управления, где контур адаптации строился на аналоговых элементах. Поэтому достаточно просто решалась проблема подстройки одного, двух параметров регулятора в зависимости от показателей качества управления на основе пропорционального или пропорционально-интегрального закона [14,16]. Такие системы назывались самонастраивающиеся. Вместе с тем в ряде случаев достаточно просто можно было реализовать самонастройку АдСУ путем изменения структуры регулятора. Специальное переключающие устройство в зависимости от информации о форме сигналов в ОК создавало необходимую структуру регулятора. АдСУ с изменяющейся структурой регулятора называются самоприспосабливающимися.
Большое внимание уделялось особому классу АдСУ – экстремальным системам управления (ЭСУ). Объект управления в ЭСУ имеет статическую характеристику с экстремумом. В процессе функционирования объекта (технологического процесса) экстремум характеристики меняет свое положение относительно входных воздействий («дрейфует»). Может изменяться и величина экстремума. Назначение ЭСУ – обеспечить управление, при котором выходная переменная ОУ соответствует экстремуму статической характеристики. Следовательно, задача адаптации состоит в определении местоположения рабочей точки относительно экстремума статической характеристики и определение, и реализация управляющих воздействий, которые обеспечивают движение рабочей точки к экстремуму статической характеристики.
Во многих системах адаптивного управления
использовались тестирующие сигналы
(изучающие), величина которых была много
меньше сигналов управления. На основе
реакции ОУ на эти сигналы строилась
поисковая процедура для определения
направления изменения управляющих
воздействий. Такие системы назывались
поисковыми. Все АдСУ можно было разделить
на поисковые и беспоисковые (аналитические)
[16]. В аналитических системах необходимая
подстройка регулятора осуществлялась
на основе вычисления показателя качества
управления и вычислительных процедур,
определяющих изменение управляющего
воздействия
в зависимости от измеряемых сигналов
в системе (![]() )
и параметров ОУ. Одновременно в научных
изданиях представлялись описания АдСУ
с самонастройкой по заданной форме
динамической характеристики ОУ:
импульсной, переходной, или
амплитудно-частотной характеристике
[15]. Они назывались АдСУ со стабилизацией
качества управления. Первые АдСУ
отличались большим разнообразием
функциональных решений контура адаптации,
часто очень оригинальных. Связано это
было с тем, что необходимый алгоритм
трудно было технически реализовать на
аналоговых элементах. Разработчики
старались по возможности минимизировать
вычислительные аспекты процедур
адаптации. В этом многообразии сложно
было провести классификацию по какому-то
одному существенному признаку.
Отличительные признаки повторялись в
разных сочетаниях в разных АдСУ. В связи
с этим и известные классификации АдСУ
были нечеткими и не отличались
однозначностью.
)
и параметров ОУ. Одновременно в научных
изданиях представлялись описания АдСУ
с самонастройкой по заданной форме
динамической характеристики ОУ:
импульсной, переходной, или
амплитудно-частотной характеристике
[15]. Они назывались АдСУ со стабилизацией
качества управления. Первые АдСУ
отличались большим разнообразием
функциональных решений контура адаптации,
часто очень оригинальных. Связано это
было с тем, что необходимый алгоритм
трудно было технически реализовать на
аналоговых элементах. Разработчики
старались по возможности минимизировать
вычислительные аспекты процедур
адаптации. В этом многообразии сложно
было провести классификацию по какому-то
одному существенному признаку.
Отличительные признаки повторялись в
разных сочетаниях в разных АдСУ. В связи
с этим и известные классификации АдСУ
были нечеткими и не отличались
однозначностью.
С течением времени, благодаря достижениям вычислительной техники и развитию теории и методов идентификации, стало возможным построение АдСУ со сложными алгоритмами адаптации. Появилась возможность постановки задачи синтеза АдСУ с заданными требованиями и исходными данными. В настоящее время известны два принципиально разных подхода к решению задачи синтеза АдСУ: идентификационный и прямой.
Идентификационный подход применяется
для синтеза АдСУ в случае выполнения
гипотезы квазистационарности объекта,
когда скорость изменения вектора
параметров
(t)
много меньше скорости протекания
переходных процессов, вызванных
изменением
(t).
Тогда адаптивное управление может быть
осуществлено за два этапа: сначала
ОУ изучается (процедура идентификации)
с целью определения текущего значения
параметров
(t)
в виде оценки
![]() ,
а затем (второй этап) с использованием
этой оценки на интервале квазистационарности
вычисляется вектор оптимальных параметров
регулятора
,
а затем (второй этап) с использованием
этой оценки на интервале квазистационарности
вычисляется вектор оптимальных параметров
регулятора
![]() = φ(
= φ(![]() )
на основе выбранного метода оптимизации,
или определяется алгоритм работы
регулятора со свободной структурой.
Для работы АдСУ по этому принципу
формируются два критерия
)
на основе выбранного метода оптимизации,
или определяется алгоритм работы
регулятора со свободной структурой.
Для работы АдСУ по этому принципу
формируются два критерия
![]() и
и
![]() .
Согласно критерию
решается задача идентификации ОУ. Путем
оптимизации критерия
определяются параметры регулятора
.
Согласно критерию
решается задача идентификации ОУ. Путем
оптимизации критерия
определяются параметры регулятора
![]() .
В обоих случаях можно использовать
поисковые алгоритмы оптимизации или
аналитическое решение задачи оптимизации.
Функциональная блок-схема АдСУ
идентификационного типа представлена
на рис. 1.2.
.
В обоих случаях можно использовать
поисковые алгоритмы оптимизации или
аналитическое решение задачи оптимизации.
Функциональная блок-схема АдСУ
идентификационного типа представлена
на рис. 1.2.
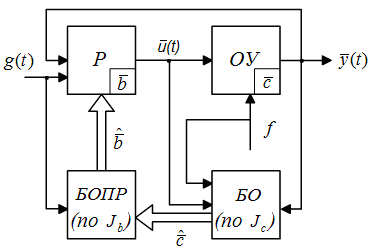
Рис. 1.2
Она состоит из основного контура ОК (ОУ
и регулятор) и контура адаптации КА,
содержащего два блока. В блоке оценивания
(БО) (идентификации) определяются оценки
параметров ОУ
и оценки измеряемого возмущения
![]() с помощью алгоритма оценивания,
минимизирующего функционал
невязки
с помощью алгоритма оценивания,
минимизирующего функционал
невязки
![]() ,
где
,
где
![]() - выходная переменная настраиваемой
модели ОУ, которая в какой-либо форме
содержится в блоке оценивания.
Следовательно, АдСУ идентификационного
типа, как правило, содержат настраиваемую
модель объекта управления. Оценки
параметров регулятора определяются в
блоке БОПР на основании информации об
оценке параметров объекта
- выходная переменная настраиваемой
модели ОУ, которая в какой-либо форме
содержится в блоке оценивания.
Следовательно, АдСУ идентификационного
типа, как правило, содержат настраиваемую
модель объекта управления. Оценки
параметров регулятора определяются в
блоке БОПР на основании информации об
оценке параметров объекта
![]() и
входного воздействия g(t), путем
минимизации критерия
.
По принципу работы контура адаптации
АдСУ идентификационного типа является
разомкнутой системой. Ошибка работы
блока оценивания не компенсируется
следующим этапом работы КА в блоке
определения параметров регулятора,
даже, если эта процедура будет
оптимизационной. Оптимальные значения
будут определены на основе ошибочных
исходных данных и к этому еще добавится
погрешность работы блока определения
параметров регулятора (БОПР).
и
входного воздействия g(t), путем
минимизации критерия
.
По принципу работы контура адаптации
АдСУ идентификационного типа является
разомкнутой системой. Ошибка работы
блока оценивания не компенсируется
следующим этапом работы КА в блоке
определения параметров регулятора,
даже, если эта процедура будет
оптимизационной. Оптимальные значения
будут определены на основе ошибочных
исходных данных и к этому еще добавится
погрешность работы блока определения
параметров регулятора (БОПР).
Если гипотеза квазистационарности в
принципе не выполняется, тогда
идентификационный режим работы КА
реализовать нельзя. В этом случае работа
КА строится как решение задачи оптимизации
по одному критерию
![]() ,
характеризующему требования к качеству
адаптивного управления. Адаптивная
система синтезируется на основе прямого
подхода. Аргумент функционала
,
характеризующему требования к качеству
адаптивного управления. Адаптивная
система синтезируется на основе прямого
подхода. Аргумент функционала![]() выбирается в виде обобщенной функции
ошибки σ(
выбирается в виде обобщенной функции
ошибки σ(![]() ,
,![]() ),
которая должна содержать информацию о
мгновенных значениях отклонений выходной
переменной
),
которая должна содержать информацию о
мгновенных значениях отклонений выходной
переменной
![]() (t)
от желаемого значения
(t)
от желаемого значения
![]() и об отклонениях параметров регулятора
вектора
(t)
от идеальных
и об отклонениях параметров регулятора
вектора
(t)
от идеальных
![]() (t),
обеспечивающих минимизацию критерия
качества.
(t),
обеспечивающих минимизацию критерия
качества.
На рис. 1.3а и 1.3б показаны возможные варианты функциональных блок-схем АдСУ прямого подхода.
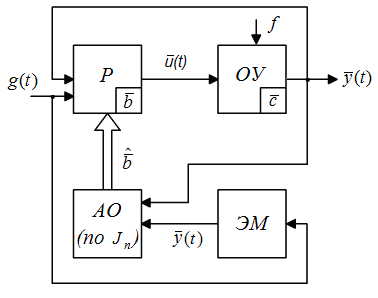
Рис 1.3а
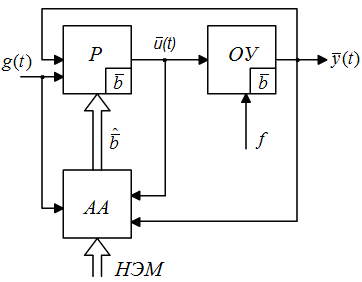
Рис 1.3б
Канал адаптации структуры рис 1.3а
содержит явную эталонную модель (ЭМ)
объекта управления, назначение которой
выдавать информацию на выходе
![]() о желаемом значении выходной переменной
ОУ в каждый момент времени. В блоке
адаптивной оптимизации (АО) параметры
регулятора
определяются путем минимизации
функционала
о желаемом значении выходной переменной
ОУ в каждый момент времени. В блоке
адаптивной оптимизации (АО) параметры
регулятора
определяются путем минимизации
функционала
![]() ,
где
,
где
![]() =
-
=
-![]() .
Желаемые динамические свойства выходной
переменной
.
Желаемые динамические свойства выходной
переменной
![]() могут
быть заданы неявной эталонной моделью
в виде коэффициентов дифференциального
уравнения (
)
или аналитическим выражением временного
сигнала (
могут
быть заданы неявной эталонной моделью
в виде коэффициентов дифференциального
уравнения (
)
или аналитическим выражением временного
сигнала (![]() ).
Неявная эталонная модель (НЭМ), как
правило, тесно связана с алгоритмом
определения коэффициентов
.
Тогда контур адаптации представляется
одним блоком алгоритма адаптации (АА),
как показано на рис. 1.3б, где решается
задача определения
).
Неявная эталонная модель (НЭМ), как
правило, тесно связана с алгоритмом
определения коэффициентов
.
Тогда контур адаптации представляется
одним блоком алгоритма адаптации (АА),
как показано на рис. 1.3б, где решается
задача определения
![]() путем оптимизации критерия
путем оптимизации критерия
![]() .
.
АдСУ прямого подхода являются замкнутыми.
Ошибка определения
или
ошибка настройки регулятора обязательно
проявится в нежелаемом изменении
выходного сигнала
![]() и
будет компенсированы работой блока АА.
На первый взгляд стратегия прямого
подхода адаптивного управления более
проста и совершенна, так как рассчитана
на возможность ее использования в
нестационарных условиях. Однако более
внимательный (тонкий) анализ алгоритмов
адаптации при обоих подходах показывает
[17], что сложность алгоритмов прямого
адаптивного управления не может быть
меньше сложности алгоритмов
идентификационного подхода. Время
адаптации в обоих подходах близкое, и
в общем случае без дополнительных причин
нет основания отдавать предпочтение
одному или другому подходу.
и
будет компенсированы работой блока АА.
На первый взгляд стратегия прямого
подхода адаптивного управления более
проста и совершенна, так как рассчитана
на возможность ее использования в
нестационарных условиях. Однако более
внимательный (тонкий) анализ алгоритмов
адаптации при обоих подходах показывает
[17], что сложность алгоритмов прямого
адаптивного управления не может быть
меньше сложности алгоритмов
идентификационного подхода. Время
адаптации в обоих подходах близкое, и
в общем случае без дополнительных причин
нет основания отдавать предпочтение
одному или другому подходу.