

Автоматизований електропривод механізмів циклічної дії
АЕП кранових механізмів
До якої групи машин за призначенням належать мостові крани:
а) підйомно-транспортні машини;
б) землерийні машини;
в) машини для транспортування рідких середовищ і газів;
г) машини для стиснення газів;
д) машини безперервного транспорту.
Визначити, який із рисунків кінематичних схем кранів відповідає перерахованим схемам:
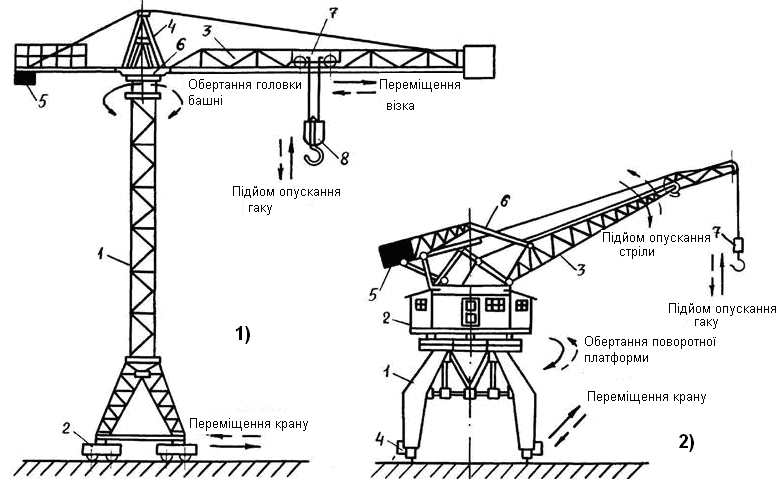

а) кінематична схема баштового крана;
б) кінематична схема портального крана;
в) кінематична схема кабельного крана;
г) кінематична схема крана-штабелера.
Розставте елементи кінематичної схеми однокінцевої підйомної лебідки, відповідно до їх порядкового номера на схемі:

а) двигун;
б) гальмо;
в )
редуктор;
)
редуктор;
г) поліспаст;
д) гакова підвіска.
Розставте елементи кінематичної схеми двокінцевої підйомної лебідки, відповідно до їх порядкового номера на схемі:

а) канатоведучий шків;
б )
кабіна;
)
кабіна;
в) противага;
г) зрівнювальний канат;
д) двигун;
е) гальмо;
ж ) редуктор;
к) гакова підвіска.
Середній режим роботи обладнання кранових механізмів характеризується номінальною тривалістю вмикань, що дорівнює:
а) 40 %;
б) 15–25 %;
в) 60 %;
г) 100 %;
д) 10–25 %.
Важкий режим роботи обладнання кранових механізмів характеризується номінальною тривалістю вмикань, що дорівнює:
а) 25–40 %;
б) 40 %;
в) 60 %;
г) 100 %;
д) 10 25 %.
Досить важкий режим роботи обладнання кранових механізмів характеризується номінальною тривалістю вмикань, що дорівнює:
а) 40 %;
б) 25–40 %;
в) 40–60 %;
г) 100 %;
д) 10–25 %.
Легкий режим роботи обладнання кранових механізмів характеризується номінальною тривалістю вмикань, що дорівнює:
а) 40 %;
б) 25–40 %;
в) 60 %;
г) 100 %;
д) 10–15 %.
Особливо важкий режим роботи обладнання кранових механізмів характеризується номінальною тривалістю вмикань, що дорівнює:
а) 40 %;
б) 25–40 %;
в) 60 %;
г) 100 %;
д) 10–25%.
Момент опору для двигуна механізму підйому є:
а) реактивним;
б) активним;
в) активно-реактивним;
г) нейтральним.
Як визначається статична потужність механізму підйому кранового механізму:
а)
![]() ;
;
б)
![]() ;
;
в)
![]() ;
;
г)
![]() ;
;
д)
![]() ?
?
Статичні навантаження установок механізмів пересування і повороту кранів, що працюють на відкритому повітрі, суттєво змінюються:
а) за наявності ухилу;
б) при впливі дощу;
в) завжди залишаються постійними;
г) при впливі вітру;
д) пункти (а) і (г).
Як визначається статичний момент, приведений до вала двигуна кранового механізму:
а)
![]() ;
;
б)
![]() ;
;
в)
![]() ;
;
г)
![]() ?
?
Назвіть вимоги до електропривода кранових механізмів:
а) забезпечення регулювання швидкості двигуна в порівняно широких межах;
б) в основному тривалий режим роботи ЕП без реверсування;
в) регулювання швидкості не потрібне або потрібне в обмежених межах;
г) мати жорсткі механічні характеристики, особливо регулювальні, щоб величина швидкості мало залежала від навантаження;
д) забезпечення реверсування електропривода і його роботи у двигунному і гальмівному режимах;
е) обмеження динамічних навантажень механічного обладнання, зумовлених наявністю пружних зв'язків, зазорів у передачах;
ж) обмеження прискорення до допустимих меж при мінімальній тривалості перехідних процесів.
До недоліків систем керування кранових механізмів на базі кулачкових контролерів можна віднести:
а) недовговічність конструкції;
б) невисокі регулювальні властивості;
в) високий відсоток неспрацьовування;
г) відсутність посадкових швидкостей;
д) низькі енергетичні показники.
Як визначається статична потужність механізму переміщення крана:
а)
![]() ;
;
б)
![]() ;
;
в) ;
г)
![]() ;
;
д)
![]() ?
?
У формулі динамічного моменту Мдин = J∑∙дод для електроприводів підйомних і тягових лебідок сумарний приведений до вала двигуна момент інерції JΣ залежить від:
а) приведеного моменту інерції всіх обертових мас лебідки;
б) моменту інерції ротора двигуна;
в) суми мас кінцевих навантажень;
г) усього перерахованого;
д) пункти (а) і (в).
Який вигляд має механічна характеристика кранового (підйомного) механізму.
|
|
|
|
 а)
а) б)
б) в)
в) г)
г)
АЕП ліфтів
Що входить до кінематичної схеми ліфта:
а) підйомна лебідка;
б) канати;
в) ківш;
г) робоче колесо;
д) механічне гальмо;
е) рука маніпулятора;
ж) кабіна;
к) противага;
л) апаратура управління?
На які види діляться за робочою швидкістю пасажирські ліфти:
а) тихохідні, швидкохідні, швидкісні, високошвидкісні;
б) тихохідні, швидкохідні, швидкісні, високошвидкісні;
в) редукторні та безредукторні;
г) тихохідні, швидкохідні, редукторні, безредукторні;
д) редукторні, безредукторні, швидкісні, високошвидкісні?
Яким пасажирським ліфтам відповідає швидкість руху кабіни до 0,5 (0,71) м/с:
а) тихохідним;
б) швидкохідним;
в) швидкісним;
г) високошвидкісним;
д) ліфтів з такою швидкістю не існує?
Яким пасажирським ліфтам відповідає швидкість руху кабіни від 4 до 10 м/с:
а) тихохідним;
б) швидкохідним;
в) швидкісним;
г) високошвидкісним;
д) ліфтів з такою швидкістю не існує?
Яким пасажирським ліфтам відповідає швидкість руху кабіни від 1 до 1,6 м/с:
а) тихохідним;
б) швидкохідним;
в) швидкісним;
г) високошвидкісним;
д) ліфтів з такою швидкістю не існує?
Яким пасажирським ліфтам відповідає швидкість руху кабіни від 2 до 4 м/с:
а) тихохідним;
б) швидкохідним;
в) швидкісним;
г) високошвидкісним;
д) ліфтів з такою швидкістю не існує?
На яких пасажирських ліфтах застосовується безредукторний електропривод:
а) тихохідних;
б) швидкохідних;
в) швидкісних;
г) високошвидкісних;
д) пункти (в) і (г)?
Чим вище жорсткість механічної характеристики двигуна привода ліфтової установки перед зупинкою:
а) тим точність зупинки вище;
б) тим точність зупинки нижче;
в) тим більш стабільна початкова зупинкова швидкість привода;
г) пункти (а) і (в);
д) пункти (б) і (в).
Назвіть вимоги до електропривода ліфтів:
а) реверсна робота двигуна;
б) забезпечення регулювання швидкості двигуна в порівняно широких межах;
в) плавний пуск і гальмування за умови, щоб прискорення й уповільнення, а також їх похідні (ривок) не перевищували встановленої норми;
г) забезпечення групового управління приводами;
д) в основному тривалий режим роботи ЕП без реверсування;
е) мінімальний час перехідних процесів;
ж) точна зупинка кабіни на рівні підлоги поверху.
Істотним недоліком систем електроприводу ліфтів з релейно-контакторною автоматикою є:
а) значний шум у будівлі;
б) відносно мала швидкодія автоматики;
в) зниження точності відпрацювання сигналів у процесі експлуатації;
г) пункти (а) і (б);
д) усі перелічені пункти.
Які двигуни застосовуються для приводу тихохідних вантажних ліфтів, які відрізняються великою вантажопідйомністю:
а) двигуни постійного струму;
б) асинхронні двигуни з фазним ротором;
в) асинхронні двигуни з короткозамкненим ротором;
г) синхронні двигуни;
д) усі перераховані двигуни?
З якої причини асинхронні двигуни з короткозамкненим ротором не застосовують для привода швидкохідних ліфтів:
а) вони мають малу перевантажувальну здатність;
б) мають низькі регулювальні властивості;
в) не допускають велику частоту вмикань за годину;
г) пункти (а) і (б);
д) пункти (а) і (в)?
Які з перерахованих двигунів привода швидкісних і високошвидкісних ліфтів мають обмежені можливості щодо точності зупинки і прискорень при перехідних процесах:
а) асинхронні з фазним ротором;
б) асинхронні з короткозамкненим ротором;
в) двигуни постійного струму;
г) усі перераховані однаково застосовуються;
д) пункти (а) і (б).
Які з перерахованих двигунів привода швидкісних і високошвидкісних ліфтів мають найкращі можливості щодо точності зупинки і прискорень при перехідних процесах:
а) асинхронні з фазним ротором;
б) асинхронні з короткозамкненим ротором;
в) двигуни постійного струму;
г) усі перераховані однаково застосовуються;
д) пункти (а) і (б).
АЕП промислових роботів
Знайти, яке з визначень відповідає правильному:
а) технологічні комплекси, автоматизовані на базі промислових роботів;
б) роботизовані системи та комплекси, в яких роботи виконують основні функції;
в) системи і комплекси, автоматизовані за допомогою роботів.
1) роботизованими;
2) робототехнічними;
3) роботизованими технологічними комплексами.
Знайти, яке з визначень відповідає певній класифікації роботизованих технологічних систем (РТС):
а) такі РТС автоматично виробляють збір, обробку та передачу інформації, а також використання її для формування різних керуючих сигналів. У промислових цехах – це системи автоматичного контролю й управління процесами виробництва;
б) такі РТС забезпечують автоматичне переміщення корисного навантаження у просторі. Оснащуються рушіями різних типів: колісними, гусеничними, крокуючими, водометними, гвинтовими, ракетними і под. У промисловості застосовуються для обслуговування складів, міжцехового і внутрішньоцехового транспортування матеріалів, деталей, інструменту й оснащення;
в) такі РТС призначені для імітації рухових функцій руки людини. Найбільший розвиток і практичне застосування вони отримали в промисловості, де їх називають промисловими роботами.
1) маніпуляційні;
2) мобільні;
3) інформаційні та керуючі.
Розставте елементи кінематичної схеми маніпулятора, відповідно до їх порядкового номера на схемі:

а) пристрій переміщення;
б) робочий орган;
в) рука маніпулятора.
Якими технічними параметрами характеризуються ПР:
а) номінальна вантажопідйомність;
б) продуктивність;
в) число ступенів рухливості;
г) діапазони переміщень за ступенями рухливості;
д) напір;
е) швидкості переміщення за ступенями рухливості;
ж) похибка позиціонування робочого органа;
к) довжина стрічки;
л) швидкість руху;
м) максимальне прискорення за ступенями рухливості;
н) тип системи координат?
Знайти, яке з визначень класифікації маніпуляторів, залежно від типу задавального органа, відповідає правильному:
а) характеризуються відсутністю пам'яті й вимагають безперервної участі оператора в процесі управління;
б) працюють без участі людини;
в) робот, поперемінно керований автоматично або оператором, оснащений пристроєм пам'яті для автоматичного виконання окремих дій.
1) біотехнічні;
2) автоматичні;
3) інтерактивний.
Знайти, яке з визначень способів управління відповідає правильному:
а) працюють за заздалегідь заданою жорсткою програмою (роботи першого покоління);
б) мають засоби чутливості і тому можуть працювати в заздалегідь не регламентованих і мінливих умовах, наприклад, брати довільно розташовані предмети, обходити перешкоди і т. д. (роботи другого покоління);
в) окрім чутливості мають систему обробки зовнішньої інформації, що забезпечує їм можливість інтелектуальної поведінки, подібно до поведінки людини в аналогічних ситуаціях (роботи третього покоління).
1) роботи з адаптивним керуванням;
2) роботи з програмним керуванням;
3) роботи з інтелектуальним керуванням.
Які бувають види систем координат ПР:
а) прямокутні;
б) конічні;
в) тороїдальні;
г) криволінійні;
д) еліпсоїдальні?
Визначити, який із рисунків систем координат (СК) промислового робота відповідає перерахованим системам:
|
|
|
|
|
|
|
|
 а)
а) д)
д) б)
б) е)
е) в)
в) ж)
ж) г)
г) к)
к)1) плоска прямокутна СК – об'єкт маніпулювання переміщається в одній площині за рахунок 2-х взаємно перпендикулярних напрямів;
2) просторова прямокутна СК – відрізняється відносною простотою і доцільна при прямолінійному переміщенні захоплювального пристрою;
3) плоска полярна СК – переміщення об'єкта відбувається в одній площині в напрямку радіус-вектора і кута повороту ;
4) циліндрична СК – характеризується переміщенням об'єкта в основній координатній площині в напрямках і , а також по нормалі до неї z;
5) сферична (полярна) СК – переміщенням об'єкта маніпулювання в просторі здійснюється за рахунок лінійного руху руки ПР на величину та її кутових переміщень і у двох взаємно перпендикулярних площинах;
6) ангулярна плоска СК – об'єкт маніпулювання переміщається в координатній площині завдяки відносним поворотам ланок руки М, що мають постійну довжину;
7) ангулярна циліндрична СК – характеризується додатковим зміщенням руки М щодо основної координатної площини в напрямку перпендикулярному до неї координати z;
8) ангулярна сферична СК – переміщення об'єкта в просторі відбувається тільки за рахунок відносних кутових поворотів ланок руки М. При цьому хоча б одна ланка повинна мати можливість повороту на кути і у двох взаємно перпендикулярних площинах.
Вибрати вимоги до ЕП ПР:
а) забезпечення групового управління приводами;
б) широка зміна діапазону навантажень на привод з переважанням інерційних зусиль;
в) забезпечення регулювання швидкості двигуна в порівняно широких межах;
г) надійне обмеження моменту і струму допустимим стопорним значенням у всіх режимах роботи;
д) швидкодія, тобто здійснення рухів виконавчих механізмів з високими швидкостями і малою похибкою позиціонування;
е) забезпечення високої точності позиціонування за кожною координатою;
ж) формування підвищеного пускового моменту;
з) робота тривалий час у нерухомому, загальмованому стані.
Розставити формули для визначення статичного моменту на валу двигуна ПР у необхідному порядку:
а)
![]() ;
;
б)
![]() ;
;
в)
![]() ;
;
г)
![]() ?
?
1) для механізмів обертання з горизонтальною віссю;
2) для механізмів підйому;
3) для механізмів горизонтального переміщення;
4) для механізмів обертання з вертикальною віссю.
Як визначається вихідна потужність маніпулятора:
а) ;
б) ;
в)
![]() ;
;
г) ;
д) .
Вказати послідовність вибору електродвигуна для різних механізмів роботів:
1) визначити момент на валу електродвигуна від інерційного навантаження;
2) визначити момент на валу електродвигуна від статичного навантаження;
3) визначити максимальний момент на валу електродвигуна;
4) провести перевірний розрахунок правильності вибору двигуна за еквівалентним моментом і часом розгону до номінальної швидкості;
5) за каталогом вибрати електродвигун.
АЕП екскаваторів
Які механізми входять до складу кінематичної схеми гусеничного екскаватора?
а) механізм підйому;
б) крокуючий механізм;
в) механізм напору;
г) механізм об'ємної подачі;
д) механізм повороту;
е) механізм регулювання кутової швидкості;
ж) механізм пересування.
За якими ознаками виконується класифікація екскаваторів:
а) за продуктивністю;
б) за кількістю робітників;
в) за видом крокуючого обладнання;
г) за розміром;
д) за характером робочого органа;
е) за вантажопідйомністю;
ж) за конструкцією.
Які основні операції включає робочий цикл екскаватора?
а) тяга, підйом ковша з одночасним поворотом на вивантаження, вивантаження ковша, поворот до місця копання з одночасним опусканням ковша в забій;
б) транспортування вантажу до ковша, поворот платформи, тяга;
в) підйом ковша, поворот платформи, вивантаження вантажу з ковша.
У якому режимі працює одноковшовий екскаватор:
а) досить важкий з різкозмінним навантаженням;
б) легкий;
в) важкий з постійним навантаженням;
г) середній зі слабко змінним навантаженням;
д) особливо важкий.
Який вигляд має механічна характеристика ЕД екскаватора?
а) |
|
б) |
г) |
 в)
в)Вибрати вимоги до електропривода механізма екскаватора:
а) надійне обмеження моменту і струму допустимим стопорним значенням у всіх режимах роботи;
б) забезпечення групового управління приводами;
в) обмеження динамічних навантажень механічного обладнання, обумовлених наявністю пружних зв'язків, зазорів у передачах;
г) забезпечення високої точності позиціонування за кожною координатою;
д) забезпечення максимальної продуктивності при мінімальних навантаженнях електромеханічного обладнання;
е) тривала робота електропривода з великою кількістю годин роботи в році;
ж) економічне регулювання швидкості в діапазоні 4–6 і рекуперацію енергії, що звільняється при гальмуванні механізму повороту при опусканні ковша.
Розставити формули для визначення зусилля, що виникають у відповідному механізмі екскаватора:
а)
![]() ;
;
б)
![]() ;
;
в)
![]() ;
;
г)
![]() .
.
1) зусилля, що виникає в підйомному механізмі лопати при повороті платформи на розвантаження;
2) зусилля в напірному механізмі лопати;
3) зусилля в підйомному канаті механічної лопати;
4) зусилля, що виникає в підйомному механізмі лопати при поверненні платформи з порожнім ковшем у забій.
Від чого залежать зусилля в підйомному канаті і напірному механізмі екскаватора:
а) опору породи копанню, ваги ковша з породою, ваги рукоятки щодо осі опорного вала;
б) щільності породи, потужності електродвигуна;
в) діаметра барабана, товщини вантажного каната?
Як визначається сумарний момент інерції обертових частин екскаватора:
а)
![]() ;
;
б)
![]() ;
;
в)
![]() ?
?
Які системи електроприводів використовують в електрообладнанні екскаватора?
а) вентильний ЕД;
б) ТП–АД;
в) Г–Д;
г) ТП–Д;
д) ПЧ–СД;
е) ПЧ–АД?