

36. Использование языков программирования в стандарте мэк 61131 при программировании автоматизированной су.
Стандарт МЭК 61131-3 устанавливает пять языков программирования ПЛК, три графических и два текстовых. Основной целью стандарта было повышение скорости и качества разработки программ для ПЛК, а также создание языков программирования, ориентированных на технологов, обеспечение соответствия ПЛК идеологии открытых систем, исключение этапа дополнительного обучения при смене типа ПЛК.
Языки МЭК 61131-3 появились не как теоретическая разработка, а как результат анализа множества языков, уже используемых на практике и предлагаемых рынку производителями ПЛК. Стандарт устанавливает пять языков программирования со следующими названиями:
структурированный текст (ST - Structured Text);
последовательные функциональные схемы (SFC - "Sequential Function Chart");
диаграммы функциональных блоков (FBD - Function Block Diagram);
релейно-контактные схемы, или релейные диаграммы (LD - Ladder Diagram);
список инструкций (IL - Instruction List).
Графическими языками являются SFC, FBD, LD. Языки IL и ST являются текстовыми.
Языки МЭК 61131-3 базируются на следующих принципах:
вся программа разбивается на множество функциональных элементов - Program Organization Units (POU), каждый из которых может состоять из функций, функциональных блоков и программ. Любой элемент МЭК-программы может быть сконструирован иерархически из более простых элементов;
стандарт требует строгой типизации данных. Указание типов данных позволяет легко обнаруживать большинство ошибок в программе до ее исполнения;
имеются средства для исполнения разных фрагментов программы в разное время, с разной скоростью, а также параллельно. Например, один фрагмент программы может сканировать концевой датчик с частотой 100 раз в секунду, в то время как второй фрагмент будет сканировать датчик температуры с частотой один раз в 10 сек;
для выполнение операций в определенной последовательности, которая задается моментами времени или событиями, используется специальный язык последовательных функциональных схем ( SFC);
стандарт поддерживает структуры для описания разнородных данных. Например, температуру подшипников насоса, давление и состояние "включено-выключено" можно описать с помощью единой структуры "Pomp" и передавать ее внутри программы как единый элемент данных;
стандарт обеспечивает совместное использование всех пяти языков, поэтому для каждого фрагмента задачи может быть выбран любой, наиболее удобный, язык;
программа, написанная для одного контроллера, может быть перенесена на любой контроллер, совместимый со стандартом МЭК 61131-3.
Любой ПЛК работает в циклическом режиме. Цикл начинается со сбора данных с модулей ввода, затем исполняется программа ПЛК и оканчивается цикл выводом данных в устройства вывода. Поэтому величина контроллерного цикла зависит от времени исполнения программы и быстродействия процессорного модуля.
37. Однопроцессорная и распределенная архитектура мпс
Под архитектурой ЭВМ понимается функциональная и структурная организация машины, определяющая методы кодирования данных, состав, назначение, принципы взаимодействия технических средств и программного обеспечения.
Исторически первыми появились однопроцессорные архитектуры. Классическим примером однопроцессорной архитектуры является архитектура фон Неймана со строго последовательным выполнением команд: процессор по очереди выбирает команды программы и также по очереди обрабатывает данные (программа и данные хранятся в единственной последовательно адресуемой памяти).
|
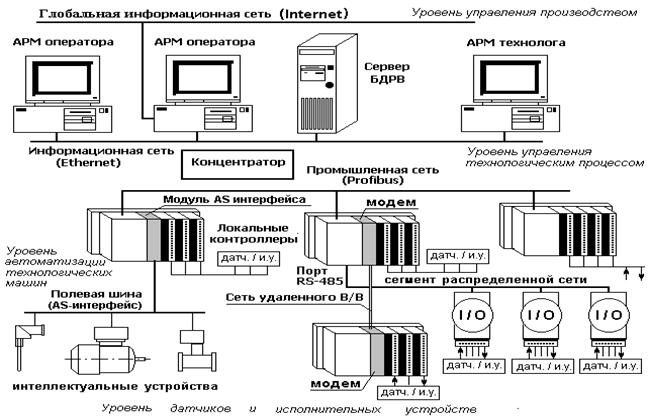
Рис.26. Уровневая архитектура распределенной микропроцессорной системы управления
Современные открытые, распределенные системы управления строятся через промышленные сети по уровневому типу. Архитектура такой системы показана на рис.26.
В этой сети выделяются следующие уровни:
управления производством;
управления технологическим процессом;
автоматизации технологических машин и устройств;
опроса датчиков и управления исполнительными устройствами.
На уровне управления производством с помощью системы Internet развернута глобальная информационная сеть, через которую администрация предприятия получает и передает информацию отраслевого типа, кроме того, она получает и обрабатывает международные финансово–экономические и конъюнктурные данные.
На уровне управления технологическим процессом в системе управления развернута информационная сеть, с помощью которой объединяются локальные серверы и рабочие станции для обмена информации по принципу клиент–сервер. Задача этой части сети состоит в обеспечении визуализации основных параметров производства, построения отчетов и архивации данных. На этом же уровне производится обмен информации между компьютерами, концентраторами и серверами. Обычно на этом уровне обмен информации происходит по высокоскоростному протоколу Ethernet. На этом же уровне могут быть установлены автоматизированные рабочие места АРМы для специалистов.
Сети, обеспечивающие обмен информации между контроллерами, датчиками и исполнительными устройствами, называются промышленными сетями. Они работают по принципу ведущий–ведомый и составляют уровень управления технологическим процессом. В состав промышленных сетей могут входить контроллеры с локальным и распределенным вводом/выводом.
На самом нижнем уровне микропроцессорной системы управления к модулям нижнего уровня подключаются датчики и исполнительные устройства (внешние устройства).