

5.2. Нечеткая адаптивная система
управления скоростью движения автомобиля
Пусть требуется разработать микропроцессорную систему управления скоростью движения автомобиля массой 1500 кг, способную поддерживать постоянную скорость в пределах от V= 10 до 100 км/ч. В качестве двигателя этого транспортного средства используется дизельный двигатель. При этом переходный процесс в системе управления должен быть не более 0,5 с, перерегулирование не более 5 %. Система управления должна обеспечивать стабилизацию скорости движения при изменениях дорожных условий (дорожного покрытия, углов наклона и др.), приводящих к изменениям момента сопротивления движению.
В процессе движения АТС скорость машины многократно изменяется. Это происходит вследствие возмущений, вызванных изменением условий движения, управления или отклонения режимов работы узлов шасси АТС от заданных водителем или автоматической системой. Однако желательно, чтобы скорость машины изменялась по заранее заданному закону или была постоянной, равной какой-нибудь определенной скорости, например плановой.
Такая постановка задачи в теории автоматического управления соответствует задачам стабилизации (или регулирования) значений управляемой величины, т. е. целью управления является
![]()
(5.1)
где Vi — скорость движения АТС; Vn — заданная (планируемая) скорость движения, которая может быть постоянной или изменяться по пути и времени в пределах Vi = Vn= Vimax; А — планируемое отклонение.
На рис. 5.14 показана функциональная схема такой стабилизирующей системы. Ее входом является задатчик 1, в качестве
Рис.
5.14. Функциональная схема системы,
стабилизирующей скорость движения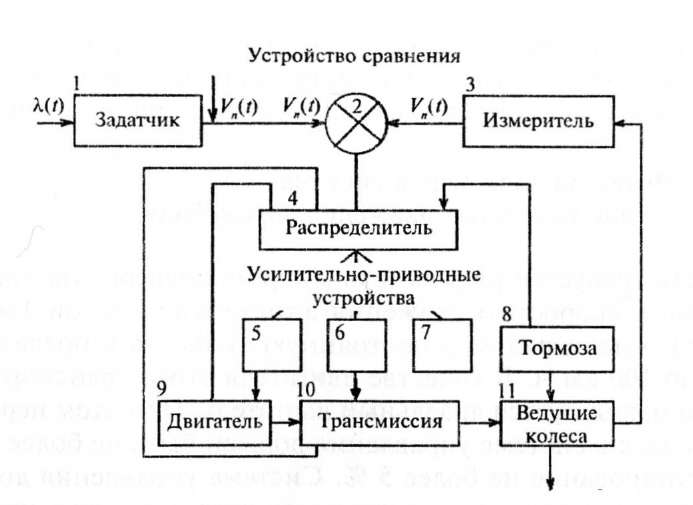
которого может быть использована педаль (рычаг) управления водителя или выход блока решения задач высших уровней иерархии. Электрический сигнал, характеризующий плановые скорости движения vn (0, подается на устройство 2, где сравнивается с данными, поступающими с измерителя 3. Сигнал рассогласования vt = vn(t) - vi(t) подается на распределитель 4, вырабатывающий управляющие сигналы изменения режимов работы двигателя 9 и трансмиссии 10 (подача топлива, переключения передачи, торможения). Обратные связи распределителя с двигателем и трансмиссией необходимы для учета фактического их состояния и режимов при выработке сигналов управления.
В качестве распределителя могут использоваться механические, гидравлические, электрогидравлические устройства или электронные управляющие устройства. В последнем случае микропроцессор, являющийся управляющим устройством (регулятором), может решать и другие задачи и, в частности, вычисление требуемой скорости. Сигналы управления после соответствующего усиления (5, 6, 7) поступают на исполнительно-приводные устройства узлов шасси.
Рассмотрим функциональные свойства стабилизирующей системы. Сопоставление целей управления с тяговой характеристикой АТС (рис. 5.15, а) показывает, что стабилизация скорости не всегда возможна. Так, в частности, если ограничение значения скорости сверху (vi < vn + A) осуществляется за счет недоиспользования мощности двигателя и (или) перехода на низшую передачу (предполагается, что изменение скорости v1 не настолько значительно, что требует интенсивного торможения), то условие vi > vn + А не обеспечивается располагаемой мощностью двигателя, если:
![]()
(5.2)
где fc — суммарное сопротивление движению; D — динамический фактор (удельная сила тяги) при движении со скоростью v. и работе двигателя на внешней характеристике.
Аналогичная ситуация может быть и при торможении, т. е. за счет стабилизации в условиях реальных АТС можно получить некоторое уменьшение диапазона изменения скорости в процессе движения, однако на отдельных режимах и при некоторых внешних условиях задача стабилизации скорости не решается и АТС требует относительно условий движения адаптивного управления. Кроме того, следует отметить, что при ограничении (vi < vn + A) в том случае, если vi > vn + А не превосходит пределов безопасной в данных условиях скорости движения, эффект регулирования может быть отрицательным, так как недоиспользуется мощность двигателя и снижается средняя скорость движения АТС (рис. 5.15, б). Поэтому на практике при создании систем,
Рис.
5.15. Тяговые характеристики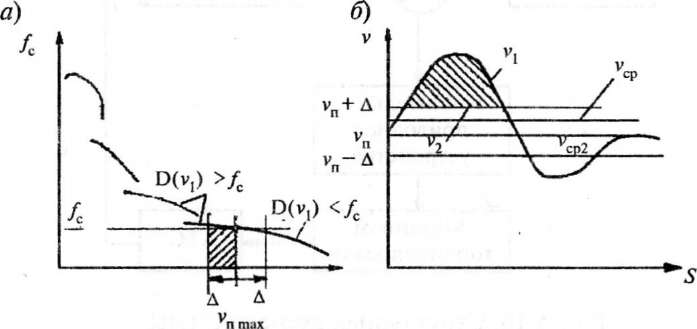
стабилизирующих скорость движения, одновременно встает вопрос оптимизации работы моторно-трансмиссионных систем АТС, т. е. выбора режима работы двигателя, тормозов и трансмиссии, в совокупности обеспечивающих заданную скорость.
Наилучшим решением здесь была бы работа двигателя на постоянных, фиксированных режимах (например, максимальной мощности или минимального расхода топлива) и плавное, бесступенчатое регулирование скорости движения АТС. Это можно было бы получить при использовании фрикционных вариаторов, а также гидромеханических, гидрообъемных и электрических трансмиссий. Однако экономические и производственные ограничения, а также ряд нерешенных научно-технических проблем пока препятствуют широкому распространению подобных трансмиссий на АТС.
Проанализированные вопросы являются общими для стабилизирующих и оптимизирующих систем.
При постоянных условиях движения поддержание скорости может осуществляться с помощью только следящей стабилизирующей системы (рис. 5.16) управления двигателем механизма топливоподачи. В сравнивающем устройстве вырабатывается напряжение ДU, равное разности заданной vn и измеренной v. скоростей. Полярность этого напряжения зависит от знака их
Рис.
5.16. Структурная схема системы стабилизации
скорости движения механизмом
топливоподачи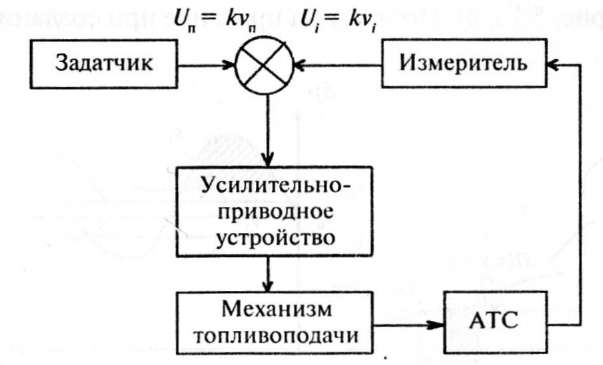
разности. Это напряжение усиливается и воздействует на приводное устройство механизма управления топливоподачей, что приводит к изменению скорости АТС.
Для выбора основных блоков такой системы управления необходимо прежде всего подобрать двигатель и оценить динамические свойства объекта управления (ОУ).
Положим, что сила трения равна примерно
![]()
где кт— коэффициент трения (сцепление с дорогой), m — масса транспортного средства, g— ускорение свободного падения.
Если транспортное средство снабдить колесами радиусом R = 0,5 м, тогда их максимальная скорость будет
Коэффициент
редукции определим из следующего
соотношения:![]()
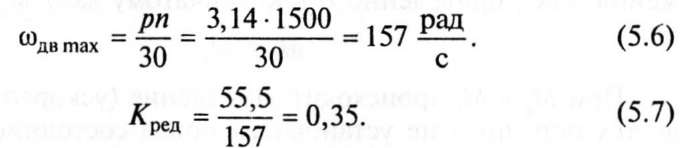
![]()
где Wдвтах — максимальная угловая скорость ротора двигателя.
Положим, что выбираемый двигатель будет иметь число оборотов вала п = 1500 об/мин. Тогда
Зная коэффициент редукции, радиус колеса и силу трения можно найти момент, который должен развивать двигатель, и его мощность.
![]()
Этому условию удовлетворяет дизельный двигатель мощностью 500 л.с., характеристики которого приведены на рис. 5.17.
Для оценки динамических свойств ОУ будем использовать его линейную модель, которая получается следующим способом.
В двигателе в зависимости от положения рейки механизма топливоподачи изменяется вращающий момент Me. В установившемся режиме величина Me равна моменту сопротивления движения АТС, приведенного к коленчатому валу Мк,
Me = Mk
![]()
При
Me
![]() Mk
происходит
замедление (ускорение) движения до тех
пор, пока не установится новое состояние
равновесия. В этом случае уравнение
движения АТС записывается в виде
Mk
происходит
замедление (ускорение) движения до тех
пор, пока не установится новое состояние
равновесия. В этом случае уравнение
движения АТС записывается в виде
![]()
где Me — вращающий момент; Mk- момент сопротивления, приведенный к коленчатому валу; J — момент инерции всех вращающих масс, приведенный к коленчатому валу двигателя; со — угловая скорость вращения вала; — сопротивление движению.
М[Нм]
Рис.
5.17. Зависимость момента сопротивления
M
от ш и скоростные
(статические) характеристики дизельного
двигателя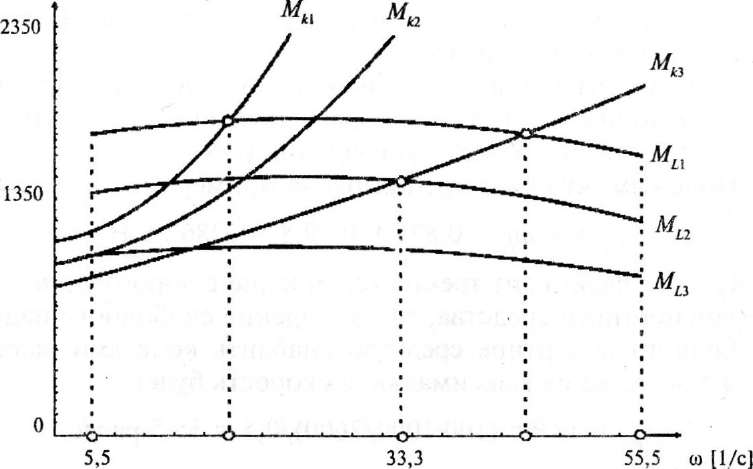
от частоты вращения со при разных значениях сопротивления движению (см. рис. 5.17).
Величина Mk1 соответствует большому сопротивлению движения, что имеет место, например, при движении на подъем с большим грузом, Mk2 — малому сопротивлению. Так как функции Me = f(ю) и Mk - f( ) изменяются плавно и не имеют разрывов, допустима их линеаризация.