

Часть 4. Системы человек-машина
Прием информации оператором
Психофизиологическая характеристика процесса приема информации
4.1. Введение
Деятельность оператора по управлению (см. рис. 1.1) начинается с приема осведомительной информации об объекте управления. Основными психическими процессами, участвующими в приеме информации, являются ощущение, восприятие, представление и мышление. Анализ этих процессов, раскрытие их природы и закономерностей необходимы для решения задачи оптимального построения информационной модели реальной обстановки.

Прием информации человеком-оператором необходимо рассматривать как процесс формирования перцептивного (чувственного) образа. Под ним понимается субъективное отражение в сознании человека свойств действующего на него объекта. Исследования, проведенные в психологии, показывают, что формирование перцептивного образа является фазным процессом. Оно включает несколько стадий: обнаружение, опознание и различение.
Обнаружение – стадия восприятия, на которой наблюдатель выделяет объект из фона, но еще не может судить о его форме и признаках.
Различение – стадия восприятия, на которой наблюдатель способен раздельно воспринимать два объекта, расположенных рядом (либо два состояния одного объекта), выделять детали объектов.
Опознание – стадия восприятия, на которой наблюдатель выделяет существенные признаки объекта и относит его к определенному классу.
Длительность этих стадий зависит от сложности воспринимаемого сигнала. Знание последовательности различения признаков сигнала и динамики становления его образа важно для решения таких инженерно-психологических задач как выбор оптимального начертания знаков, определение числа строк в телевизионном изображении, скорости передачи сигналов и смены кадров в проекционных системах отображения и т. п. В этой связи возникает также проблема «помехоустойчивости» восприятия, т. е. возможности человека восстанавливать сигналы, частично разрушенные помехами.
Большую роль при построении перцептивного образа играют представления (вторичные образы), сформированные у человека в процессе развития. Акт восприятия есть вместе с тем и соотнесение формирующегося образа с некоторым хранящимся в памяти эталоном. Для представления характерна схематизация образа и элементарный уровень обобщения. Система представлений, хранящихся в памяти человека, образует своеобразную «субъективную шкалу», с которой соотносятся те или иные перцептивные образы. Это значительно ускоряет процесс восприятия, но вместе с тем иногда может служить источником ошибок опознания.
Процесс опознания происходит путем последовательного «разворачивания» сложных признаков. Когда в поле зрения находится несколько объектов, их опознание начинается почти одновременно. Однако пока один из них не будет опознан с вероятностью порядка 70%, опознание остальных задерживается. Вопрос о формировании «субъективных шкал» и их использовании в актах восприятия сигналов нуждается в дальнейшем изучении, результаты которого могли бы быть весьма полезны для разработки систем оптимального кодирования информации и принципов обучения операторов.
Восприятие как основа процесса приема информации оператором характеризуется такими свойствами, как целостность, осмысленность, избирательность, константность. Целостность восприятия возникает в результате анализа и синтеза комплексных раздражителей в процессе деятельности оператора. Осмысленность состоит в том, что воспринимаемый объект относится к определенной категории.
Восприятие обладает также избирательностью, которая заключается в преимущественном выделении одних объектов по сравнению с другими. Избирательность восприятия является выражением определенного отношения оператора к воздействию на него предметов и явлений внешней среды.
Константностью восприятия называется относительное постоянство некоторых воспринимаемых свойств предметов при изменении условий восприятия. Например, при зрительном восприятии имеет место константность цвета, величины и формы предметов. Константность восприятия цвета заключается в относительной неизменности видимого цвета при изменении освещения. Относительное постоянство видимой величины предметов при их различной удаленности называется константностью восприятия величины. Константность восприятия формы предметов заключается в относительной неизменности восприятия формы предмета при изменении положения его по отношению к линии взора оператора. Константное восприятие связано с восприятием предмета или предметной ситуации как единого целого.
Перечисленные свойства восприятия представляют определенный интерес в плане инженерной психологии в том смысле, что они не являются изначальными свойствами перцептивного образа и формируются в процессе его становления. Этот факт имеет большое значение для правильного построения средств отображения информации, для организации профессионального отбора и обучения операторов.
Физиологическая основа формирования перцептивного образа является работа анализаторов. Анализаторами называются нервные приборы, посредством которых человек осуществляет анализ раздражений. Любой анализатор состоит из трех основных частей: рецептора, проводящих нервных путей и центра в коре больших полушарий головного мозга (рис. 3.1).

Основной функцией рецептора является превращение энергии действующего раздражителя в нервный процесс. Вход рецептора приспособлен к приему сигналов определенной модальности (вида)– световых, звуковых и др. Однако его выход посылает сигналы, по своей природе единые для любого, входа нервной системы. Это позволяет рассматривать рецепторы как устройства кодирования информации.
Проводящие нервные пути осуществляют передачу нервных импульсов в кору головного мозга. Эти импульсы, достигнув коры головного мозга, подвергаются там определенной обработке и снова возвращаются в рецепторы. Только в этом процессе взаимодействия рецепторов и центров в коре больших полушарий происходит формирование перцептивного образа.
В зависимости от модальности поступающего сигнала различают виды анализаторов. Наибольшее значение для деятельности оператора имеют зрительный анализатор, за ним следуют слуховой и тактильный (осязательный) анализаторы. Участие других анализаторов в деятельности оператора невелико.
Основными характеристиками любого анализатора являются пороги – абсолютный (верхний и нижний), дифференциальный и оперативный. Понятие каждого из этих порогов может быть введено по отношению к энергетическим (интенсивность), пространственным (размер) и временным (продолжительность воздействия) характеристикам сигнала.
Минимальная величина раздражителя, вызывающая едва заметное ощущение, носит название нижнего абсолютного порога чувствительности, а максимально допустимая величина – название верхнего порога чувствительности (это понятие вводится по отношению лишь к энергетическим характеристикам). Сигналы, величина которых меньше нижнего порога, человеком не воспринимаются. Увеличение же интенсивности сигнала сверх верхнего порога вызывает у человека болевое ощущение (сверхгромкий звук, слепящая яркость и т. д.). Интервал между нижним и верхним порогами носит название диапазона чувствительности анализатора. Примерные значения основных характеристик различных анализаторов приводятся в табл. 3.1.

С помощью анализаторов человек может не только ощущать тот или иной сигнал, но и различать сигналы. Для характеристики различения вводится понятие дифференциального порога (от лат. differentia – различать), под которым понимается минимальное различие между двумя раздражителями (сигналами), либо между двумя состояниями одного раздражителя, вызывающее едва заметное различие ощущений. Экспериментально установлено, что величина дифференциального порога пропорциональна исходной величине раздражителя;
 (3.1)
(3.1)
где J – исходная величина сигнала (раздражителя): dJ – величина дифференциального порога: k – константа, равная 0,01 для зрительного анализатора, 0,10–для слухового и 0,30–для тактильного.
На основании данного выражения может быть установлена зависимость между величиной сигнала и величиной вызываемого им ощущения:
 (3.2)
(3.2)
где s – величина ощущения: k и С – константы.
Данная зависимость (3.2) носит название основного психофизического закона, или закона Вебера – Фехнера. Согласно этому закону, интенсивность ощущения прямо пропорциональна логарифму силы раздражителя. Закон справедлив только для среднего участка диапазона чувствительности анализатора.
Понятие дифференциального порога имеет большое значение в психофизике и экспериментальной психологии. Однако оно является явно не достаточным для инженерной психологии. Дело в том, что величина дифференциального порога характеризует предельные возможности анализатора и поэтому не может служить основанием для выбора допустимой длины алфавита сигналов. Для этого необходимо пользоваться другой величиной – в инженерной психологии это оперативный порог различения. Он определяется той наименьшей величиной различия между сигналами, при которой точность и скорость различения достигают максимума. Обычно оперативный порог различения в 10–15 раз больше дифференциального.
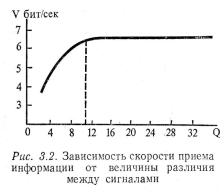
Сказанное иллюстрируется рис. 3.2, где по оси ординат отложена величина скорости приема информации, а по оси абсцисс – величина
 (3.3)
(3.3)
где ∆J – величина различия между двумя сигналами.
Из рисунка следует, что при Q = 10÷15 скорость приема информации достигает максимума и при дальнейшем увеличении ∆J практически не меняется.
Важнейшими свойствами анализаторов, имеющими, большое значение для деятельности оператора, являются адаптивность и избирательность.
Анализатор является самонастраивающейся системой. Это его свойство проявляется в адаптации, т.е. в изменении диапазона чувствительности в соответствии с условиями работы анализатора. В процессе адаптации изменяются как энергетический, так и временной и пространственный пороги анализаторов. Адаптация характеризуется величиной изменения чувствительности и временем, в течение которого она осуществляется. Эти показатели различны для разных анализаторов. Так, например, тактильный анализатор адаптируется наиболее быстро, зрительный – сравнительно медленно, однако диапазон изменения чувствительности у него очень большой.
Избирательность анализатора заключается в его способности из множества раздражителей, действующих на человека, в каждый момент времени в зависимости от условий выделять лишь определенные. Избирательность является условием формирования адекватных ощущений и обеспечивает высокую помехоустойчивость анализаторов. Избирательность может быть амплитудной, пространственной, временной и вероятностной. Последнее означает дублирование сигналов, передаваемых в мозговой центр, за счет движения воспринимающих аппаратов и бирецепции.
Рассмотренные характеристики и устройство анализаторов позволяют сформулировать общие требования к сигналам-раздражителям, адресованным оператору:
интенсивность сигналов должна соответствовать средним значениям диапазона чувствительности анализаторов, которая обеспечивает наиболее оптимальные условия для приема и переработки информации;
для того чтобы оператор мог следить за изменением сигналов, сравнивать их между собой по интенсивности, длительности, пространственному положению, необходимо обеспечить различие между сигналами, превышающее оперативный порог различения;
перепады между сигналами не должны значительно превышать оперативный порог, так как при больших перепадах возникает утомление; следовательно, существуют не только оптимальные пороги, но и оптимальные зоны, в которых различение сигналов осуществляется с наибольшей скоростью и точностью;
наиболее важные и ответственные сигналы следует располагать в тех зонах сенсорного поля, которые соответствуют участкам рецепторной поверхности с наибольшей чувствительностью;
при конструировании индикаторных устройств необходимо правильно выбрать вид сигнала, а следовательно, и модальность анализатора (зрительный, слуховой, тактильный и т. д.).
Энергетические и информационные характеристики зрительного анализатора
Раздражителем зрительного анализатора является световая энергия, а рецептором – глаз. Зрение позволяет воспринимать форму, цвет, яркость и движение предметов. Человек-оператор около 90% всей информации получает через зрительный анализатор.
Глаз человека работает по принципу фотографической камеры, роль объектива в которой выполняет хрусталик. Световые лучи, проходя через хрусталик, преломляются и создают уменьшенное обратное изображение на внутренней стенке глазного яблока (сетчатке). На сетчатке находятся светочувствительные нервные окончания (рецепторы), которые носят название палочек и колбочек. Рецепторы поглощают падающий на них световой поток и преобразуют его в нервные импульсы, которые передаются по зрительному нерву в мозг. Величина этих импульсов зависит от освещенности сетчатки на том ее участке, на котором получается изображение рассматриваемого предмета.
Возможность зрительного восприятия определяется энергетическими, пространственными, временными и информационными характеристиками сигналов, поступающих к оператору. Совокупность этих характеристик и их численные значения определяют видимость объекта (сигнала) для глаза. В соответствии с названными характеристиками сигналов целесообразно рассмотреть четыре группы характеристик зрительного анализатора (рис. 3.3)

Энергетические характеристики зрительного анализатора определяются мощностью (интенсивностью) световых сигналов, воспринимаемых глазом. К ним относятся: диапазон яркостей, воспринимаемых глазом, контраст, цветоощущение.
Световой поток, излучаемый источником или отражаемый светящейся поверхностью, попадая в глаз наблюдателя, вызывает зрительное ощущение. Оно будет тем сильнее, чем больше плотность светового потока, излучаемого или отражаемого по направлению к глазу. Следовательно, источник света или освещенный предмет будет тем лучше виден, чем большую силу света излучает каждый элемент поверхности в направлении глаза. Яркостью предмета называется величина
 (3.4)
(3.4)
где J – сила света, т. е. световой поток, излучаемый на единицу телесного угла; S – величина светящейся поверхности; α – угол, под которым рассматривается поверхность.
Единицей яркости является кандела на 1 кв. м (кд/м2). Яркостью в 1кд/м2 обладает равномерно светящаяся плоская поверхность, излучающая в перпендикулярном к ней направлении свет силой 1 кл на каждый квадр. метр. Яркость является основной характеристикой света. Величиной яркости определяется величина нервных импульсов, возникающих в сетчатке глаза.
В общем случае яркость предмета определяется двумя составляющими – яркостью излучения и яркостью за счет внешней засветки (яркостью отражения):
 (3.5)
(3.5)
Яркость излучения определяется мощностью источника света, и его светоотдачей. Вторая же составляющая формулы определяется уровнем освещенности данной поверхности и ее отражающими свойствами:
 (3.6)
(3.6)
где Е – освещенность поверхности, лк; ρ– коэффициент отражения поверхности.
Коэффициент отражения во многом определяется цветом поверхности (табл. 3.2). Он показывает, какая часть падающего на поверхность светового потока отражается ею.

Так как в поле зрения оператора могут попадать предметы с различной яркостью, в инженерной психологии вводится также понятие адаптирующей яркости. Под ней понимают ту яркость, им которую адаптирован (настроен) в данный момент времени зрительный анализатор. Приближенно можно считать, что для изображений с прямым контрастом (см. ниже) адаптирующая яркость равна яркости фона, а для изображений с обратным контрастом – яркости предмета.
Диапазон чувствительности зрительного анализатора весьма велик: он простирается от 10-6 до10 нит. Наилучшие же условия для работы будут при уровнях адаптирующей яркости, лежащей в пределах от нескольких десятков до нескольких сотен нит. Об этом, в частности, свидетельствует рис. 3.4, на котором приведена зависимость числа ошибок и перевернутых букв (в процентах от общего числа выполненных операций) в работе наборщиков типографий от яркости шрифта. Из рисунка видно, что при Ва < 8 нит число ошибок резко возрастает.

Видимость предметов определяется также контрастом их по отношению к фону. Различают два вида контраста: прямой (предмет темнее фона) и обратный (предмет ярче фона). Количественно величина контраста оценивается как отношение разности в яркости предмета и фона к большей яркости:
 ,
,
 (3.7)
(3.7)
где Вф и Вп – соответственно яркость фона и предмета.
Оптимальная величина контраста считается равной 0,60÷0,95. Работа при прямом контрасте является более благоприятной, чем работа при обратном контрасте.
Однако обеспечение требуемой величины контраста является только необходимым, по еще недостаточным условием нормальной видимости предметов. Нужно также знать, как этот контраст воспринимается в данных условиях. Для его оценки вводится понятие порогового контраста, который равен
 (3.8)
(3.8)
где dBпор – пороговая разность яркости, т. е. минимальная разность яркости предмета и фона, впервые обнаруживаемая глазом.
Величина Кпор определяется дифференциальным порогом различения. Для получения оперативного порога необходимо, чтобы фактическая величина разности яркости предмета и фона была в 10–15 раз больше пороговой. Это означает также, что для нормальной видимости величина контраста, рассчитанная по формулам (3.7), должна быть больше Кпор в 10–15 раз.
Величина порогового контраста зависит от яркости и размеров предметов (рис. 3.5). Из рисунка видно, что предметы с большими размерами видны при меньших контрастах и что с увеличением яркости уменьшается значение порогового контраста.

Большое влияние на условия видимости предметов оказывает величина внешней освещенности. Однако это влияние будет различным при работе оператора с изображениями, имеющими прямой и обратный контраст. Увеличение освещенности при прямом контрасте приводит к увеличению условий видимости (величина Кпр увеличивается), при обратном – к ухудшению видимости (величина Коб уменьшается). Эти явления можно проследить при анализе формул (3.7). При увеличении освещенности величина Кпр увеличивается, поскольку яркость фона возрастает больше, чем яркость предмета (коэффициент отражения фона больше коэффициента отражения предмета). Величина Коб при этом уменьшается, так как яркость предмета практически не меняется (предмет светится), а яркость фона увеличивается.
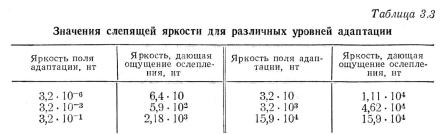
В ряде случаев в поле зрения оператора могут быть сигналы разной интенсивности. При этом сигналы с большей яркостью могут вызвать нежелательное состояние глаз – ослепленность. Слепящая яркость определяется размером светящейся поверхности и яркостью сигнала, а также уровнем адаптации глаза.
 (3.9)
(3.9)
где ω – телесный угол, под которым оператору видна светящаяся поверхность (в стерадианах).
Следовательно, для создания оптимальных условий зрительного восприятия необходимо не только обеспечить требуемую яркость и контраст сигналов, но также и равномерность распределения яркостей в поле зрения. В случаях, когда невозможно использовать для расчетов формулу (3.9), можно пользоваться данными табл. 3.3 или же необходимо обеспечить перепады яркостей не более 1 к 30.
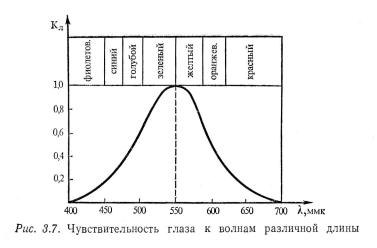
Глаз человека воспринимает электромагнитные волны в диапазоне 380–760 нм. Однако чувствительность глаза к волнам различной длины неодинакова. Наибольшую чувствительность глаз имеет по отношению к волнам в середине спектра видимого света (500– 600 нм). Этот диапазон соответствует излучению желто-зеленого цвета. Важной характеристикой глаза является относительная видность
 (3.10)
(3.10)
где s – ощущение, вызываемое источником излучения длиной 550 нм; sλ – ощущение, вызываемое источником той же мощности длиной λ.
Кривая относительной видности приведена на рис. 3.7. Из рисунка, например, видно, что для обеспечения одинакового зрительного ощущения необходимо, чтобы мощность синего излучения была в 16,6, а красного – в 9,3 раза больше мощности желто-зеленого излучения. По этой причине цветоощущение (относительная видность) условно также может быть отнесено к энергетическим характеристикам зрительного анализатора.
Влияние цвета в деятельности оператора очень велико. Во-первых, он может использоваться как один из способов кодирования информации, во-вторых, – для эстетического оформления помещений и пультов управления с точки зрения улучшения зрительного восприятия.
Основной информационной характеристикой зрительного анализатора является пропускная способность, т. е. то количество информации, которое способен анализатор принять в единицу времени. Зрительный анализатор можно представить в виде канала связи, состоящего из нескольких участков передачи информации. Очевидно, пропускная способность канала в целом будет определяться пропускной способностью того участка, для которого она минимальна.
Наибольшая пропускная способность (~5,6·109 дв. ед./сек) имеет место на уровне фоторецепторов (сетчатки). По мере продвижения к более высоким уровням приема информации пропускная способность уменьшается, составляя на корковом уровне лишь 20–70 дв. ед./сек. Еще меньше пропускная способность для деятельности в целом (с учетом ответных действий человека). Здесь она составляет 2÷4 дв. ед./сек.
Приведенные данные позволяют представить зрительный анализатор в виде информационной «воронки», широкая часть которой соответствует сетчатке, а узкая – зрительной области коры головного мозга (рис. 3.8).
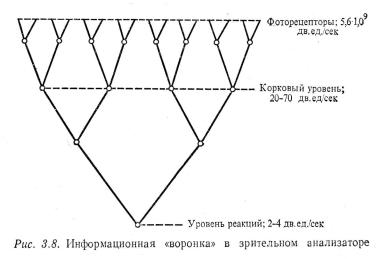
В подобном принципе работы зрительной системы заложен глубокий биологический смысл – информационная «воронка» повышает надежность линии передачи и резко сокращает вероятность посылки в мозг ошибочного сигнала. Благодаря этому сообщения, характеризующиеся в нижних отделах зрительного анализатора значительной статистической избыточностью, по мере передачи в вышележащие этажи принимают все более и более экономную форму.
Пространственные и временные характеристики зрительного анализатора
Пространственные характеристики зрительного анализатора определяются воспринимаемыми глазом размерами предметов и их месторасположением в пространстве. К ним относятся: острота зрения, поле зрения и объем зрительного восприятия.
Остротой зрения называется способность глаза различать мелкие детали предметов. Она определяется величиной, обратной тому минимальному размеру предмета, при котором он различим глазом. Угол зрения, равный 1º, соответствует единицы остроты зрения. Острота зрения зависит от уровня освещенности, расстояния до рассматриваемого предмета и его положения относительно наблюдателя, возраста. Так, например, острота зрения под углом 10º в 10 раз меньше, а под углом 30º в 23 раза меньше, чем прямо перед собой.
Размеры предметов выражаются в угловых величинах, которые связаны с линейными размерами (рис.3.9) следующими отношениями:
 (3.11)
(3.11)
где h и α – соответственно линейный и угловой размеры предмета; l– расстояние от глаза до предмета.
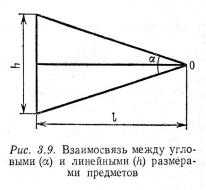
Острота зрения характеризует абсолютный пространственный порог восприятия. Минимально же допустимые размеры изображения, предъявляемого оператору, должны быть на уровне оперативного порога и составлять не менее 15°. Однако это справедливо только для предметов простой формы. Для сложных предметов, опознавание которых ведется не только по внешним и внутренним признакам, оптимальные условия восприятия будут в том случае, если их размеры составляют не менее 30–40°. Эта величина принимается в инженерной психологии в качестве рекомендуемого размера отдельных знаков и элементов изображения.
Важной характеристикой зрительного восприятия является его объем: число объектов, которые может охватить человек в течение одной зрительной фиксации, т. е. при симультанном восприятии. Обнаружено, что при предъявлении не связанных между собой объектов объем восприятия составляет 4–8 элементов. Последние исследования показывают, что объем воспроизведенного материала определяется не столько объемом восприятия, сколько объемом памяти. В зрительном образе может отражаться значительно большее число объектов, однако они не могут быть воспроизведены из-за ограниченного объема памяти. Следовательно, практически важно учитывать не столько объем восприятия, сколько объем памяти.
Условно все поле зрения можно разбить на три зоны: центрального зрения (~4°), где возможно наиболее четкое различение деталей; ясного видения (30–35°), где при неподвижном глазе можно опознать предмет без различных мелких деталей; периферического зрения (75–90°), где предметы обнаруживаются, но не опознаются. Зона периферического зрения играет большую роль при ориентации во внешней обстановке. Объекты, находящиеся в этой зоне, легко и быстро могут быть перемещены в зону ясного видения с помощью установочных движений (скачков) глаз.
Большую роль в процессе зрительного восприятия играют движения глаз. Они делятся на два больших класса: поисковые (установочные) и гностические (познавательные).
С помощью поисковых движений осуществляется поиск заданного объекта, установка глаза в исходную позицию и корректировка этой позиции. Длительность поисковых движений определяется углом, на который перемещается взор.
 (3.12)
(3.12)
где β – угол перемещения взора, град; tп – время перемещения взора, сек.
К гностическим относятся движения, участвующие в обследовании объекта, его опознании и различении его деталей. Основную информацию глаз получает во время фиксации, т. е. во время относительно неподвижного положения глаза, когда взор пристально устремлен на объект. Во время скачка глаз почти не получает никакой информации. Если продолжительность скачка в среднем составляет 0,025 сек, то продолжительность фиксации в зависимости от условий восприятия 0,25–0,65 сек и более. Результаты исследований показывают, что общее время фиксаций составляет 90–95% от времени зрительного восприятия.
Фиксации неотделимы от микродвижений глаз. В ряде опытов при помощи специального устройства изображение объекта стабилизировалось относительно сетчатки глаза, т. е. изображение не перемещалось по сетчатке. Уже через 2–3 сек после стабилизации человек переставал видеть объект. Следовательно, движения являются необходимым условием зрительного восприятия.
Временные характеристики зрительного анализатора определяется временем, необходимым для возникновения зрительного ощущения при тех или иных условиях работы оператора. К ним относятся: латентный (скрытый) период зрительной реакции, длительность инерции ощущения, критическая частота мельканий, время адаптации, длительность информационного поиска.
Латентным периодом называется промежуток времени от момента подачи сигнала до момента возникновения ощущения. Это время зависит от интенсивности сигнала (так называемый закон силы: чем сильнее раздражитель, тем реакция на него короче), его значимости (реакция на значимый для оператора сигнал короче, чем сигналы, не имеющие значения для оператора), сложности работы оператора (чем сложнее выбор нужного сигнала среди остальных, тем реакция на него будет больше), возраста и других индивидуальных особенностей человека. В среднем же для большинства людей латентный период зрительной реакции лежит в пределах 160-240 мсек.
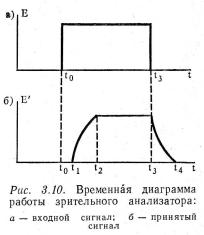
Временная диаграмма работы зрительного анализатора показана на рис. 3.10. В промежутке времени t0 – t3 на глаз человека действует световой сигнал. Зрительное ощущение этого сигнала начинается не в момент t0, а в момент t1. Промежуток времени t0 – tl представляет собой латентный период зрительного анализатора. Зрительное ощущение, возникнув в момент времени t1 развивается не сразу, а постепенно и достигает своего максимального значения в момент t2, после чего оно сохраняется в течение всего времени действия сигнала (раздражителя). После окончания воздействия раздражителя (момент t3) зрительное ощущение исчезает не сразу, а также постепенно и заканчивается лишь в момент t4 . Промежуток t3 – t4 носит название времени инерции ощущения.
Рассмотренные особенности работы зрительного анализатора следует учитывать при организации деятельности оператора. Прежде всего, время действия сигнала не должно быть меньше времени инерции зрения, которое зависит от яркости и угловых размеров предметов (табл. 3.4). В противном случае воспринимаемый контраст и интенсивность сигнала будут во столько раз меньше действительных значений, во сколько время действия сигнала меньше времени инерции.

Сказанное имеет большое значение для правильного и четкого обнаружения сигнала. Однако только этого еще не достаточно для его опознания. Для опознания появляющихся знаков необходимо дополнительное время («выяснительный период», который обычно не может быть меньше 0,1 сек). При трудном различении (сложности знаков) процесс опознания становится еще более медленным, составляя для знаков средней сложности более 0,2 сек, а для знаков повышенной сложности – более 0,6 сек.
Если же возникает необходимость в последовательном реагировании оператора на дискретно появляющиеся сигналы, то период их следования должен быть не меньше времени сохранения ощущения, равного 0,2–0,5 сек. В противном случае будет замедляться точность и скорость реагирования, поскольку во время прихода нового сигнала в зрительной системе оператора еще будет оставаться образ предыдущего сигнала.
Критической частотой мельканий (КЧМ) называется та минимальная частота проблесков, при которой возникает их слитное восприятие. Эта частота зависит от яркости, размеров и конфигурации знаков (рис. 3.11). Зависимость КЧМ от яркости подчинена основному психофизическому закону
 (3.13)
(3.13)
где а и с – константы, зависящие от размеров и конфигурации знаков, а также от спектрального состава мелькающего изображения.
Из формулы (3.13) и рис. 3.11 видно, что снижение величины fкр, если это необходимо по каким-либо техническим причинам, может быть достигнуто путем уменьшения яркости знака, сокращения его размеров или упрощения Конфигурации. При обычных условиях наблюдения величина КЧМ лежит в пределах 15–25 Гц. При зрительном утомлении она, несколько понижается.

Вопрос о частоте мельканий имеет большое значение при решении двух видов инженерных задач. В тех случаях, когда необходимо, чтобы мелькания не замечались (например, при проектировании изображения на экран, в технике кино и телевидения), частота смены информации должна превышать fкр и составлять не менее 40 Гц. При необходимости использовать мерцание для кодирования информации (например, для привлечения внимания оператора) следует иметь в виду, что наименьшее зрительное утомление будет при частоте мельканий 3-8 Гц.
К временным характеристикам зрительного анализатора относится и время адаптации. В процессе адаптации в значительной степени (до 108 раз) меняется чувствительность зрительного анализатора. Различают две формы адаптации: темновую (при переходе от света к темноте) и светловую (при обратном переходе). Время адаптации зависит от ее вида и составляет десятки минут при темновой адаптации и единицы и даже доли минут при светловой (рис. 3.12).

Весьма тесно связано с временными характеристиками зрительного анализатора и восприятие движущихся объектов. Минимальная скорость движения, которая может быть замечена глазом, зависит от наличия в поле зрения фиксированной точки отсчета. При наличии такой точки абсолютный порог восприятия скорости равен 1–2 угл. мин/сек, без нее – 15–30 угл. мин/сек. Эти данные получены в условиях, когда время предъявления не ограничено и составляет не менее 10–15 сек.
Для некоторых видов операторской деятельности процесс восприятия сводится к информационному поиску – нахождению на устройстве отображения объекта с заданными признаками. Такими признаками может быть проблесковое свечение, особая форма или цвет объекта, отклонение стрелки прибора за допустимое значение и т. д. Задача оператора заключается в нахождении такого объекта и характеризуется временем, затраченным на поиск.
Общее время информационного поиска равно
 (3.14)
(3.14)
где
 ,
, –
соответственно время i-го перемещения
взора и i-й фиксации; n
– число шагов поиска (число фиксаций),
затраченных для нахождения нужного
объекта.
–
соответственно время i-го перемещения
взора и i-й фиксации; n
– число шагов поиска (число фиксаций),
затраченных для нахождения нужного
объекта.
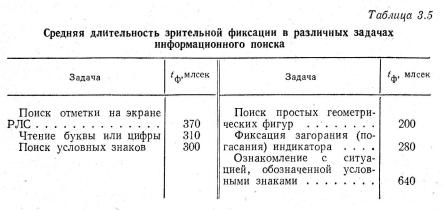
Время перемещения определяется углом скачка взора, время фиксации зависит от целого ряда факторов: свойств информационного поля, способа деятельности наблюдателя, степени сложности искомых элементов. Однако в условиях конкретного информационного поля (особенно при однородности его элементов) и конкретной задачи величина относительно постоянна и является характеристикой данных условий работы (табл. 3.5).
Учитывая, что в условиях конкретной задачи, при которых tф постоянно и tn < tф, выражение (1.14) примет вид
 (3.15)
(3.15)
Среднее значение времени поиска равно
 (3.16)
(3.16)
Где
 – математическое ожидание числа шагов
поиска (числа зрительных фиксаций,
необходимых для нахождения предмета с
заданными признаками).
– математическое ожидание числа шагов
поиска (числа зрительных фиксаций,
необходимых для нахождения предмета с
заданными признаками).
Величина
находится при построении математической
модели информационного поиска. С учетом
этого время
 равно
равно
 (3.17)
(3.17)
где N – общий объем (количество элементов) информационного поля; М – число элементов, обладающих заданным для поиска признаком; а – объем зрительного восприятия.
Объем зрительного восприятия ограничен, с одной стороны, объемом оперативной памяти (4–8 элементов), а с другой стороны, пространственными характеристиками зрения (размерами зоны ясного видения). Следует, однако, иметь в виду, что в процессе поиска размеры зоны ясного видения составляют примерно 10°. В итоге под объемом восприятия в данном случае следует считать то количество предметов (но не более 4–8), которое одновременно попадает в зону, ограниченную углом 10 1 горизонтальной и вертикальной плоскостях.
На основании формулы (3.17) можно определить основные требования к организации информационного поля с точки зрения минимизации времени поиска:
элементы поля следует располагать так, чтобы в объем фиксации, ограниченный зоной 10°, попадало не более чём 4–8 объекту;
следует по возможности уменьшать объем поля, не допуская нахождения в нем ненужных элементов;
искомые элементы следует выделять таким образом, чтобы обеспечить наименьшее время фиксации: наилучшим является выделение искомого элемента другим цветом или с помощью светового маркера, более плохие результаты получаются при его выделении проблесковым свечением или изменением размера и яркости (хотя эти способы более просты с точки зрения их технической реализации).
Характеристики слухового анализатора
В системах управления значительная часть информации поступает к человеку в форме звуковых сигналов. Отражающие эти сигналы ощущения вызываются действием звуковой энергии на слуховой анализатор. Он состоит из уха, слухового нерва и сложной системы нервных связей и центров мозга. В аппарат, обозначаемый термином «ухо», входят: наружное (звукоулавливающий аппарат), среднее (звукопередающий аппарат) и внутреннее (звуковоспринимающий аппарат) ухо. Ухо воспринимает определенные частоты звуков благодаря функциональной способности волокон его мембраны к резонансу. Физиологическое значение наружного и среднего уха заключается в проведении и усилении звуков. Слуховой анализатор человека улавливает форму волны, частотный спектр чистых тонов и шумов, осуществляет анализ и синтез в определенных пределах частотных компонент звуковых раздражений, обнаруживает и опознает звуки в большом диапазоне интенсивностей и частот. Слуховой анализатор позволяет дифференцировать звуковые раздражения и определять направление звука, а также удаленность его источника. Источником звуковых волн может быть любой процесс, вызывающий местное изменение давления или механические напряжения в среде. Слуховой аппарат человека воспринимает как слышимый звук колебания с частотой 16 Гц–20 кГц; ухо наиболее чувствительно к колебаниям в области средних частот – от 1000 до 4000 Гц. Звуки частот ниже 16 Гц называются инфразвуками, а выше 20 кГц – ультразвуками. Инфразвуки и ультразвуки также могут оказывать воздействие на организм, но оно не сопровождается слуховым ощущением.
Физически звук характеризуется амплитудой (интенсивностью), частотой и формой звуковой волны. Интенсивностью звукового сигнала принято считать силу звука в эрг/см2-сек. Так как сила звука пропорциональна квадрату звукового давления, то в практике психофизиологической акустики чаще всего используется непосредственно звуковое давление, выраженное в децибелах от исходного уровня, равного 0,0002 дин/см2.
Сила звука в децибелах определяется выражением
 (3.18)
(3.18)
где J – сила звука данного сигнала; J0 – исходный уровень силы внука эталонного сигнала. Так как
 (3.19)
(3.19)
 (3.20)
(3.20)
где
а
– коэффициент пропорциональности;
 – звуковое давление;
– звуковое давление;
 – исходный уровень давления.
– исходный уровень давления.
Давление 0,0002 дин/м2 при частоте 2000 Гц соответствует силе звука, равной 109эрг/см2сек, и считается абсолютным порогом звукового анализатора.
В реальных условиях деятельности человеку приводится воспринимать звуковые сигналы на том или ином фоне. При этом фон может маскировать полезный сигнал, что, естественно, затрудняет его обнаружение. При разработке и конструировании акустических индикаторов задача борьбы с эффектом маскировки и поисков оптимального отношения интенсивности полезного сигнала к интенсивности шума (фона) является одной из важнейших.
Основными количественными характеристиками слухового анализатора являются абсолютный и дифференциальный пороги. Нижний абсолютный порог соответствует интенсивности звука в децибелах, обнаруживаемого испытуемым с вероятностью 0,5; верхний порог – интенсивность, при которой возникают различные болевые ощущения (щекотание, покалывание, головокружение и т. д.). Между ними расположена область восприятия речи (рис. 3.13).
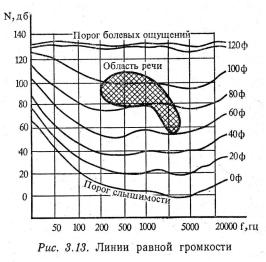
Человек оценивает звуки, различные по интенсивности, как равные по громкости, если частоты их также различны. Например, шум с интенсивностью 120 дБ и частотой 10 Гц оценивается как равные по громкости тону, имеющему интенсивность 100 дБ и частоту 1000 Гц. Таким образом, снижение интенсивности как бы компенсируется увеличением частоты. Субъективное ощущение интенсивности звука называется громкостью и измеряется в фонах. Уровень громкости в фонах численно равен интенсивности звука в децибелах для чистого тона частотой 1000 Гц, воспринимаемого как равно-громкий с данным звуком. Соотношения между частотой, интенсивностью и громкостью звука также показаны на рис. 3.14.
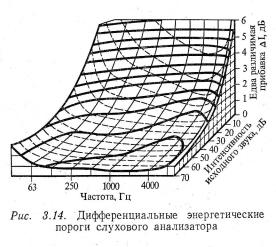
Величина едва различимой прибавки к исходному звуковому раздражителю зависит не только от его интенсивности, но и от частоты (рис. 3.14). В пределах среднего участка диапазона изменения звука по частоте и интенсивности величина энергетического дифференциального порога примерно постоянна и составляет 0,1 от исходной интенсивности раздражителя.
Рис.
Дифференциальный порог по частоте зависит как от частоты исходного звука, так и от его интенсивности. В пределах от 60 до 2000 Гц при интенсивности звука выше 30 дБ абсолютная величина едва различимой прибавки равна примерно 2–3 Гц. Для звуков выше 2000 Гц величина резко возрастает и изменяется пропорционально росту частоты. Относительная величина дифференциального порога для звуков в зоне 200–16 000 является почти константной и равна примерно 0,002. При сокращении интенсивности звука ниже 30 величина дифференциального порога резко возрастает.
Временной порог чувствительности акустического анализатора, т. е. длительность звукового раздражителя, необходимая для возникновения ощущения, так же как пороги по громкости и высоте, не является постоянной величиной. С увеличением как интенсивности, так и частоты он сокращается. При достаточно высокой интенсивности (30 дБ и более) и частоте (1000 Гц и более) слуховое ощущение возникает уже при длительности звукового раздражителя, равной всего 1 мсек. Однако при уменьшении интенсивности звука той же частоты до 10 дБ временной порог достигает 50 мсек. Аналогичный эффект дает и уменьшение частоты.
Оценка громкости и высоты очень коротких звуков затруднена. При длительности синусоидального тона 2–3 мсек человек лишь отмечает его наличие, но не может определить его качеств. Любой звук оценивается только как «щелчок». С увеличением длительности звука слуховое ощущение постепенно проясняется: человек начинает различать высоту и громкость. Минимальное время, необходимое для отчетливого ощущения высоты тона, равно примерно 50 мсек.
Дифференцировка двух звуков по частоте и интенсивности также зависит от отношения их по длительности и от интервала между ними. Как правило, звуки, равные по длительности, различаются точнее, чем неравные.
Акустический анализатор обеспечивает отражение и положения Источника звука в пространстве: его расстояние и направление относительно субъекта.
Короткие дистанции порядка 1–2 м оцениваются довольно грубо, с точностью до десятков сантиметров. С увеличением дистанции до 3 м точность оценки возрастает примерно вдвое, однако на дистанции 4 м она вновь снижается, правда, все еще оставаясь более высокой, чем на дистанции 2 м. Расстояние до движущегося объекта определяется на слух точнее, чем до неподвижного.
Важную роль в оценке изменений расстояния до источника звука играет различение изменений громкости. Звук, громкость которого увеличивается, воспринимается как приближающийся, и – наоборот. Другим основанием оценки расстояний на слух является звуковысотное различение.
При приближении звучащего тела к слушателю частота звуковых колебаний увеличивается, а при его удалении уменьшается (эффект Доплера). Это отражается в слуховых ощущениях в форме изменения высоты звука. Значительное влияние на оценку расстояния оказывает тембр. Более тембрированный звук (более сложная фирма звуковой волны) обычно оценивается как более удаленный, менее тембрированный – как более близкий.
Точность распознавания направления звука различна по отношению к волнам разной частоты. Для низких частот (до 800 Гц) порог различения направления в горизонтальной плоскости равен примерно 10–11°; с увеличением частоты он возрастает, достигая ≈ 22° в районе 3000 Гц, а затем вновь уменьшается. Для частоты 10 000 Гц порог различения направления не превышает 13°.
Точность определения направления зависит также от положения источника звука относительно координат человеческого тела. Наиболее точно дифференцируются направления в горизонтальной плоскости. При этом на первом месте по точности оказывается правое направление, затем левое. Достаточно хорошо дифференцируется поперечное направление. Но с ним часто смешиваются верхнее и заднее. Точность оценки верхнего и заднего направлений в два с лишним раза меньше по сравнению с левым и правым.
Решающую роль в восприятии направлений звука играет взаимодействии сторон акустического анализатора (бинауральный эффект).
Если источник звука находится прямо перед человеком, то звуковые волны достигают обоих ушей одновременно. Если же он отклоняется вправо или влево, то время прихода звука к одному уху будет короче, чем к другому. Этой разностью и определяется оценка направления источника звука. Воспринимаемый угол отклонения от средней линии пропорционален величине этой разности. Значительное место в бинауральном слухе принадлежит также отношению амплитуд звуковых колебаний, поступающих на правое и левое ухо.
Пороги зависят от времени предъявления сигнала, положения головы испытуемого, адаптации и изменяются с течением времени для одного и того же испытуемого. Эти изменения могут составлять до 5 дБ за 0,5 мин, тогда как в некоторых условиях ярко выраженной тенденции к увеличению или уменьшению порога может и не быть даже в течение часа. Сравнение каждодневных изменений порогов, полученных в течение некоторого периода времени, с усредненными данными этих изменений показывает, что колебание изменений в 3–4 раза превышает усредненное. Иногда порог может изменяться даже в течение нескольких секунд. Если стимул состоит из пяти сигналов одного тона длительностью по 0,4 сек, следующих друг за другом с интервалом в 0,6 сек, то все они будут восприняты только при интенсивности, на 6 дБ превышающей абсолютный порог, когда не слышно ни одного из этих сигналов. Значительное влияние на величину порогов оказывает длительность сигнала. Так, для синусоидальных сигналов средних и высоких частот в диапазоне длительностей от 10 до 100–200 мсек удвоение длительности приводит к понижению порога на 3 дБ.
На дифференциальный порог существенное влияние оказывают адаптация и бинауральность или монауральность прослушивания. С величиной дифференциального порога тесно связано также явление «маскировки» чистых тонов на фоне белого шума. В качестве меры маскировки принимается отношение двух интенсивностей, представляемое как сдвиг порога в децибелах. Первая из них – маскирующая интенсивность, вторая – маскируемая. Порог маскировки – еле слышимый маскируемый сигнал.
Восприятие речевых сообщений
Одним из наиболее эффективных исторически сложившихся средств передачи информации человеку является речь. Вопрос о характеристиках речевых сигналов прежде всего возникает при разработке аппаратуры, предназначенной для передачи информации от человека к человеку. Однако этим его значение не ограничивается. Также открываются возможности использования речевых сигналов также при обмене информацией между человеком и машиной.
Проблема речи имеет кардинальное значение в психологии. Она выступает в той или иной форме при изучении сенсорных процессов, памяти, умственных действий, двигательных навыков, свойств личности и т. д. Данные, накопленные в экспериментальной психологии, позволили раскрыть ряд существенных аспектов механизмов восприятия речи и речеобразования. Они послужили основой для постановки проблемы речевой коммуникации в плане инженерной психологии.
Задачи техники связи потребовали изучения зависимости восприятия речевых сигналов от их акустических характеристик, определения разборчивости речи в условиях шума, поиска путей повышения разборчивости и т. п.
Форма волны является функцией, которая связывает мгновенное речевое давление со временем. Речевое давление есть сила, с которой речевая волна давит на единицу площади, обычно перпендикулярной к губам говорящего и расположенной в произвольном, но определенном участке по отношению к говорящему, на расстоянии 1 м от него.
Речевой звук является сложным. Он включает ряд обертонов, находящихся в гармоническом отношении к основному тону (гармоник). Для повышения разборчивости речи увеличивают ее интенсивность.
Важным условием восприятия речи является различение длительности произнесения отдельных звуков и их комбинаций. Среднее время длительности произнесения гласного равно примерно 5,35 сек. Длительность согласных колеблется от 0,02 до 0,30 сек. При восприятии потока речи особенно важно различение интервалов между словами или группами слов. Исключение пауз или их неверная расстановка может привести к искажению смысла воспринимаемой речи. Восприятие и понимание речевых сообщений (аудирование) в значительной мере зависит от темпа их передачи. Оптимальным считается темп 120 слов/мин. Сообщения достаточно хорошо воспринимаются при темпе речи 160 слов/мин.
Чтобы речевые звуки были понятными, их интенсивность должна превышать интенсивность шумов примерно на 6 дБ. Но обнаружить звуки можно даже и в том случае, если интенсивность речи меньше интенсивности шума (примерно также на 6 дБ).
Если одновременно увеличивать уровни речи и шума, оставляя константным их отношение, то разборчивость речи будет повышаться, но лишь до некоторого предела, за которым наблюдается ее падение. При увеличении уровня речи до 120 дБ и шума до 115 дБ (отношение речи к шуму остается +5 дБ) разборчивость речи ухудшается примерно на 20%.
Речь обладает не только акустическими, но и некоторыми другими специфическими характеристиками. Слово имеет определенным фонетический, фонематический, слоговой, морфологический состав, является определенной частью речи, несет определенную смысловую нагрузку. Важным фактором, влияющим на опознание слов, является их частотная характеристика. Чем чаще встречается слово, тем при более низком отношении речи к шуму оно опознается.
При восприятии отдельных слогов и слов существенную роль играют их фонетические характеристики; при восприятии словосочетаний в действие вступают синтаксические зависимости, а фонетические отступают на второй план.
При изучении аудирования слов, словосочетаний и предложений, передаваемых на фоне белого шума (при отношении речи к шуму 110 дБ), было установлено, что точность опознания зависит от длины слов. Если односложные слова правильно аудируются лишь в 12,5% случаев, то шестисложные – в 40,6%. Более длинное слово обладает большим числом опознавательных признаков, что обеспечивает и более точное его аудирование. Наблюдается также тенденция к более точному аудированию слов, начинающихся с гласного звука, по сравнению со словами, начинающимися с согласного (разница около 10%).
Определенное значение имеет место ударного слога. Если ударение находится в конце слова, то все слово опознается значительно лучше (разница в правильном восприятии слов с ударением на первом и третьем слогах составляет 20%).
На восприятие слов решающее влияние оказывают фонетические закономерности. При восприятии словосочетаний довольно отчетливо начинает проявляться влияние синтаксических закономерностей. Слушатель улавливает синтаксическую связь между словами, которая помогает ему восстановить сообщение, разрушенное шумом. Если абстрагироваться от лексико-семантических характеристик словосочетаний и представить только модель связи, то оказывается, что слушатель легче всего улавливает согласование, затем управление и, наконец, примыкание. Интересно отметить, что стереотипные словосочетания, фразеологизмы опознаются значительно хуже, чем можно было бы ожидать исходя из вероятностной модели восприятия. Слишком большое сужение сочетательных возможностей слова ограничивает возможность поиска. Увеличение количества возможных ответов как бы расширяет «зону поиска» и тем самым повышает вероятность правильного опознания. Это лишний раз подтверждает положение о том, что аудирование есть активный процесс.
При переходе к фразам слушатель начинает ориентироваться уже не на отдельные элементы предложения, а на весь его сложный грамматический каркас.
При изучении влияния длины и глубины фразы, передаваемой на фоне белого шума (отношение сигнала к шуму в 10 дБ), на точность ее аудирования было обнаружено, что длина фраз не имеет для слушателя особого значения примерно до уровня в 11 слов. Превышение этого числа приводит к существенному ухудшению аудирования. С увеличением глубины, если даже длина фразы остается неизменной, точность аудирования снижается. Глубокие части фразы улавливаются слушателем намного хуже, чем мелкие, критической величиной является глубина фразы, равная 7 ± 2.
Изучалось также восприятие речевых сообщений, которые включали фразы, допускающие неоднозначную интерпретацию (вызывающие «семантический шум»). Было показано, что в этих условиях процесс восприятия замедляется, возникает необходимость повторного восприятия тех частей текста, которые предшествуют критической фразе. В ходе восприятия человек, преодолевая неоднозначность, осуществляет трансформацию фраз.
Приведенные данные показывают, что аудирование представляет собой многоуровневый процесс, в котором сочетаются фонетический синтаксический и семантический уровни. При этом вышележащие уровни играют ведущую роль, определяя ход всего процесса аудирования, что необходимо иметь в виду при организации речевых сообщений.
Изучение восприятия речи для инженерной психологии имеет принципиальное значение, так как язык, сформировавшийся в процессе длительной истории человечества, представляет собой весьма эффективную систему кодирования информации, адресованной человеку.
Характеристики тактильного анализатора
Существующие способы передачи информации человеку рассчитаны в основном на зрительный и слуховой анализаторы, которые в силу этого нередко оказываются перегруженными. Возникает вопрос о возможности использования других сенсорных каналов. В этой связи представляют интерес данные, полученные при изучении осязательного восприятия. Экспериментально показано, что осязательный образ формируется на основе синтеза массы тактильных и кинетических сигналов. Наиболее четко воспринимается раздражение прикосновения (тактильные раздражения) дистальных частей тела (особенно кончиков пальцев). Тактильные рецепторы осуществляют фильтрацию раздражений и ограничение афферентного потока. Абсолютный порог чувствительности на дистальных частях тела обладает широким диапазоном (от 3 до 300 г/мм2). Порог различения равен примерно 0,07 исходной величины давления. Временной порог тактильной чувствительности равен 130 мсек. Пространственный порог колеблется от 1,1 до 67 мм. Наиболее низок он на дистальных частях тела (порог ладонной части и концевой фаланги пальца руки равен 2,2 мм, плечевого участка кожи – 67,7 мм).
Поскольку осязательное восприятие есть развернутый процесс, скорость приема информации здесь невелика. По этому показателю осязание значительно уступает зрению. Однако в ходе тренировки наблюдается редукция ощупывающих движений и повышение роли тактильных компонентов осязания. При определенных условиях возможно точное опознание несложного объекта при простом прикосновении.
Тактильный анализатор используется для передачи информации человеку редко. Однако в некоторых случаях его использование Может способствовать повышению эффективности деятельности человека. Так, применение «тактильного кода» при работе с клавишными устройствами (простые геометрические фигуры укреплены на клавишах) скорость и точность действий оператора могут быть значительно повышены. Тактильные стимуляторы иногда используются так же, как вспомогательное средство для управления самолетом (для передачи летчику сигналов о тангаже и угле крена).
При нарушении зрения роль тактильного анализатора резко возрастает. У слепого и слепоглухого человека он становится основным каналом, по которому информация о внешней среде пере дается в мозг. Экспериментально-психологические исследования показывают, что при определенной тренировке человек может научиться различать с высокой точностью тактильные и особенно вибрационные сигналы. Примером эффективного использования тактильно-вибрационной чувствительности для передачи информации слепому человеку является «Оптакон» («Optacon»). Это устройство позволяет преобразовывать оптические сигналы в тактильно-вибрационные и используется слепым человеком для чтения обычных книг.
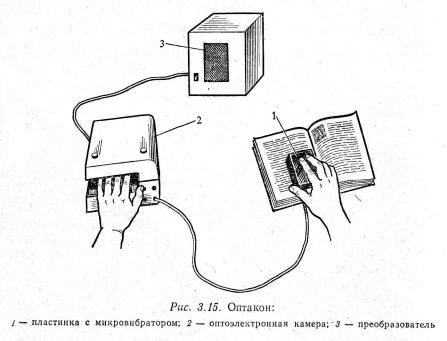
Оно состоит из миниатюрной оптоэлектронной камеры, пластинки с микровибраторами и преобразователя сигналов. Во время чтения человек помещает указательный палец одной руки на пластинку с микровибраторами (2,5 см х 1,0 см; 144 микровибратора), а другой рукой перемещает оптоэлектронную камеру вдоль строк книги. Буквы и любые другие знаки последовательно воспроизводятся на пластинке и воспринимаются пальцами (рис. 3.15). При сравнительно небольшой тренировке скорость чтения достигает 40–50 слов в минуту.
Взаимодействие анализаторов при приеме информации
Анализаторы человека, различные каналы приема информации функционируют не изолированно друг от друга. Они представляют собой единую систему, все части которой теснейшим образом взаимосвязаны. Воздействие раздражителя на какой-либо анализатор не толь вызывает его прямую реакцию, но и приводит к определенным изменениям процессов функционирования всех других анализаторов. Вместе с тем прямая реакция любого анализатора зависит от состояния всех других.
Межанализаторные связи могут быть двух видов: активирующие и информирующие.
Активирующие связи приводят к изменению чувствительности анализатора под влиянием различных побочных раздражителей, связи могут быть как безусловнорефлекторными, так и условнорефлекторными. На содержание возникающих в процессе приема информации чувственных образов они не оказывают существенного влияния.
Информирующие же связи оказывают прямое влияние на содержание возникающих образов. К ним относятся разнообразные ассоциации ощущений, перевод ощущений одной модальности в другую и т. д. В процессе формирования информирующих связей и при их проявлении важную роль играет память.
На основе рассмотренных связей и взаимодействия анализаторов и процессе развития человека формируются функциональные системы.
Так как функциональные системы формируются в процессе естественного развития человека, а их структура и организация определяются общими условиями его жизни и деятельности, то в особых, специфических условиях возможен конфликт между ранее сформировавшимися функциональными системами, с одной стороны, и условиями и требованиями новой трудовой деятельности – с другой. Результатом этого может явиться нарушение пространственной ориентировки, возникновение различных иллюзий и т. п.
Чтобы предотвратить подобные нарушения адекватности ощущений, очевидно, необходимо перестроить сложившиеся ранее функциональные системы или сформировать новые путем специальной тренировки в соответствии с новыми условиями трудовой деятельности.
Большое количество сенсорных входов человека позволяет пережевать ему информацию различными способами. В принципе, одна и та же информация при соответствующем кодировании может быть передана через любой анализатор. При этом возможно модулирование не одного, а нескольких параметров физического процесса, несущего информацию. Так, например, использую в качестве сигнала оптический раздражитель, можно менять его яркость, цвет, положение в пространстве, форму и т. д.
Система анализаторов человека является многоканальной и обладает огромными возможностями по приему информации. Однако при разработке и создании индикационных устройств эти возможности используются далеко не полностью. В основном технические средства отображения рассчитываются на визуальный прием информации, и гораздо реже используется слуховой канал. Остальные анализаторы почти никогда не принимаются в расчет. Стремление конструкторов все сигналы переводить только в визуальную форму вряд ли является оправданным, так как при этом сильно перегружается зрительный анализатор, а возможности человека использовать другие анализаторы не реализуются.
Проблема разгрузки зрения является частью более общей проблемы выбора вида анализатора и рационального распределения поступающей информации между разными анализаторами. Известно, что каждый анализатор в отношении приема сигналов имеет свои преимущества и свои недостатки. Так, слух имеет некоторые преимущества в приеме непрерывных сигналов, а зрение – в приеме дискретных. Время простой реакции на звук меньше, чем на свет, но самая короткая реакция – на тактильный раздражитель. Слуховой и зрительный анализаторы принимают информацию, находясь на расстоянии от ее источника, а тактильный – при непосредственном воздействии (прикосновении). Различна и разрешающая способность анализаторов.
Индикаторы, рассчитанные на визуальный и слуховой прием информации, вряд ли во всех случаях жизни являются лучшими. По-видимому, иногда целесообразно использовать и другие анализаторы. Например, сигнал опасности может быть адресован болевому анализатору, который окажется более эффективным, чем визуальный и слуховой. В сложной обстановке эти анализаторы могут просто не принять (пропустить) сигнал опасности. Поэтому при выборе вида анализатора во всех случаях нужно иметь в виду наличие межанализаторных связей, которые могут обеспечить как искусственную стимуляцию этих анализаторов, так и торможение их активности. Правильно выбрать вид анализатора (или модальность сигнала) – это значит повысить надежность приема и переработки информации, а следовательно, и надежность работы всей системы управления.
В некоторых случаях средством повышения надежности передачи информации может быть дублирование сигнала в разных модальностях, т. е. одновременная или последовательная посылка его к разным анализаторам. Это средство особенно целесообразно при передаче сигналов о маловероятных событиях. Однако сразу же необходимо отметить, что при решении оператором сложных задач, особенно если оператор не имеет достаточной тренировки, дублирование сигнала в разной модальности может вызвать дополнительные трудности. В результате надежность работы оператора может быть снижена.
Таким образом, при конструировании индикаторов кроме изучения возможности только соответствующего анализатора, необходимо учесть межанализаторные связи, формирующиеся функциональные системы и те общие условия, в которых будет работать человек-оператор. Определяя оптимальный способ сигнализации об управляемых объектах, необходимо по возможности учитывать всю систему раздражителей, действующих на все анализаторы человека.
Подробный анализ специальных условий труда оператора в системе управления позволяет решить вопрос о том, какая функциональная система анализаторов должна быть сформирована у оператора для приема сигналов. Изучение структуры и динамики функциональных систем (выявление относительной роли и последовательности включения анализаторов в деятельность по приему сигналов) является предпосылкой эффективной разработки технических устройств ввода и вывода информации. Одновременно с этим знание особенностей и путей формирования функциональных систем анализаторов необходимо для определения методов обучения операторов и конструирования учебной техники (тренажеров, стендов, макетов и т. д.).
Хранение и переработка информации оператором
Характеристика памяти
Приняв поступившую информацию, оператор так или иначе ее анализирует и преобразует. В процессах переработки информации решающая роль принадлежит памяти и мышлению.
В деятельности человека, управляющего машинами по приборам, в том или ином виде проявляются все основные формы памяти: кратковременная (непосредственная, или иконическая, и оперативная) и долговременная. Формы памяти, как видно из обозначающих их терминов, различаются по времени хранения информации. Кратковременная память обеспечивает хранение поступившей информации в течение коротких промежутков времени (секунды и минуты), долговременная – в течение длительного времени (дни, месяцы, годы).
Кратковременная память подразделяется на непосредственную (иконическую) и оперативную. В непосредственной памяти хранится почти вся информация, поступившая в какой-то момент времени на органы чувств, но хранится она недолго: всего несколько секунд. Непосредственное запоминание – это как бы фотография объектов, воздействующих на органы чувств. Оперативная память представляет собой способность человека сохранять текущую информацию, необходимую для выполнения того или иного действия; длительность хранения определяется временем выполнения данного действия. Простейший пример оперативной памяти – сохранение первых слов принимаемого речевого сообщения в течение всего времени его аудирования. При переводе информации из непосредственной памяти в оперативную происходит ее селекция по критериям, определяемым задачей, которую решает человек.
Долговременная память хранит информацию как бы впрок. При переводе информации из кратковременной памяти в долговременную происходит ее дальнейшая селекция и вместе с тем реорганизация. Соотношение между перечисленными формами памяти зависит от задач, решаемых системой «человек – машина», и от структуры деятельности оператора. В одних случаях ведущее место принадлежит кратковременной памяти, в других – долговременной. В инженерной психологии большое внимание уделяется оперативной памяти, так как она в значительной степени влияет на надежность и эффективность действий оператора. Показано, что существенную роль в оперативной памяти могут играть не только процессы запоминания информации, но и процессы ее «сбрасывания», т. е. исключения информации из памяти. Оператор иногда допускает ошибки не потому, что не запомнил необходимую информацию, а потому, что не забыл ненужную, уже использованную.
Объем оперативной памяти определяется не количеством сохранения информации, а количеством воспринимаемых стимулов и почти не зависит от их информационного содержания. Человек может точно повторить 9 двоичных цифр, около 8 десятичных, 7 букв алфавита, 5 односложных слов (рис. 4.1). При увеличении количества информации, приходящейся на один стимул, общее количество запоминаемой информации возрастает.

Объем долговременной памяти, оцениваемой по отношению запоминаемого материала к необходимому числу повторений, определяется количеством принимаемой информации.
Кратковременная и долговременная память имеют различные функции в организации поведения. Кратковременная память связана прежде всего с первичной ориентировкой в окружающей среде и поэтому направлена главным образом на фиксацию общего числа вновь появляющихся сигналов вне зависимости от их информационного содержания.
Психологи
исследовали объем долговременной памяти
на материале запоминания чисел. Полученные
результаты зависимости объема памяти
от количества запоминаемой информации
показаны на рис. 4.2. Из этого графика
видно, что объем памяти зависит от
количества информации. Эта зависимость
обратно пропорциональна. Кривая ее
выражает функцию
 ,
где у
– объем памяти, а х
– количество информации. Из этой
зависимости становится очевидным, что
увеличение информации снижает объем
запоминаемого материала, а уменьшение
увеличивает его.
,
где у
– объем памяти, а х
– количество информации. Из этой
зависимости становится очевидным, что
увеличение информации снижает объем
запоминаемого материала, а уменьшение
увеличивает его.
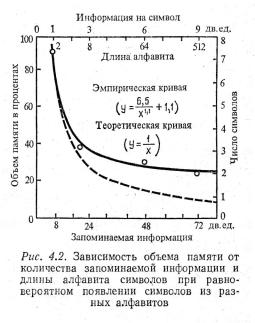
Результаты проведенных экспериментов говорят о том, что из разных по длине сообщений запоминаются лучше те, которые несут меньше новой информации. С увеличением количества информации и числа символов объем памяти уменьшается. Следовательно, чтобы увеличить объем запоминаемого материала, надо: уменьшить количество информации, сократить количество запоминаемых символов путем укрупнения «кусков» информации, одновременно уменьшить и количество информации, и количество запоминаемых символов.
Дальнейшие исследования позволили установить, что в случае запоминания информации на короткий срок (кратковременная память) объем памяти в решающей степени зависит от количества запоминаемых символов. Объем долговременной памяти в большей мере зависит от количества информации.
Запоминание. Характер запечатления, его сила, яркость и четкость зависят, с одной стороны, от особенностей воздействия отражаемых человеком предметов и явлений, а с другой – от характера деятельности и психологического состояния человека, т. е. от его активности.
Исследования показывают, что для облегчения запоминания, увеличения объема памяти важнейшее значение имеет рациональная группировка исходного материала, переход на более крупные оперативные единицы памяти. Кроме того, можно указать на следующие приемы:
в определенных условиях переход на более длинный алфавит, на укрупненные оперативные единицы памяти оказывается выгодным, ибо позволяет сократить количество символов в запоминаемом материале без увеличения количества информации;
для облегчения запоминания важное значение имеет нахождение в запоминаемом сообщении избыточной информации;
один из способов сокращения информации состоит в перекодировании запоминаемых символов.
Для сознательного и активного развития, а равно и самовоспитания памяти полезно знать следующие основные правила запоминания материала.
Большую роль при запоминании играет направленность на прочность запоминания. Экспериментально доказано, что если перед человеком ставится задача запомнить материал на короткий срок или надолго, то во втором случае материал хранится более длительное время, чем в первом. Это различие в прочности объясняется тем, что установка, мнемоническая направленность на долгое запоминание материала вызывает более активную, сложную деятельность мозга при запоминании. Материал более выгодно группируется и более тщательно перекодируется и осмысливается. Из этого следует психолого-педагогический вывод: очень важно, чтобы учащиеся знали не только то, какой материал надо запомнить, но и с какой полнотой и прочностью. Активность запоминания в решающей степени зависит от характера деятельности обучаемых.
Традиционная психология всегда подчеркивала преимущество произвольного, преднамеренного запоминания перед запоминанием непроизвольным, непреднамеренным. Однако опыты, проведенные психологами, существенно поколебали это утверждение. Было установлено, что при определенной организации деятельности человека непреднамеренное запоминание может дать более высокие результаты, чем преднамеренное.
Жизненные наблюдения и экспериментальные исследования показывают огромное превосходство осмысленного запоминания над механическим. По данным профессора Н.А.Рыбникова, продуктивность осмысленного запоминания в 20 раз выше механического. В чем же причина столь существенного различия? Прежде всего в том, что механическое запоминание основано главным образом на многократном повторении запоминаемого материала.
Осмысленное же запоминание основывается на сокращении количества запоминаемой информации, установлении в запоминаемом сообщении избыточной информации, на перекодировании, т. е. на понимании запоминаемого материала. Новые связи здесь образуются с использованием старых, ранее сформированных знаний. Смысловое запоминание является более экономным, емким и продуктивным.
Отдавая предпочтение осмысленному запоминанию, не следует отрицать важное значение и механического запоминания.
При определенных условиях эффективным способом запоминания может быть перевод словесной информации в наглядные образы (например, зрительно представляемые схемы).
Это вовсе не означает, что надо стремиться во всех случаях трансформировать словесную информацию в зрительную. Образы обладают большой информационной емкостью, но в отрыве от слова они плохо включаются в ранее приобретенную систему связей. Наилучшие результаты с точки зрения запоминания, как показали экспериментальные исследования, достигаются в случае сочетания образа и слова. В наибольшей степени такое сочетание, единство достигается в кино и телевидении. В настоящее время эти технические средства дают наиболее эффективный способ передачи информации человеку. Вместе с тем они являются очень действенным средством для развития памяти. Именно этим средствам обучения принадлежит большое будущее. Продуктивность запоминания теснейшим образом связана с эмоциональной сферой личности обучаемого. Известно, что события, вызвавшие эмоцию, хранятся в памяти человека в течение более длительного времени, чем нейтральные события.
Обычно считается, что память обращена только к прошлому. Между тем, как показывают исследования, ее важнейшей детерминантой является предвидение возможных событий (прогнозирование) и планирование предстоящей деятельности. Иначе говоря, объем и точность запоминания зависят не только от того, что человек делал в прошлом, но и от того, что он предполагает в будущем. В экспериментах Б. Ф. Ломова и А. К. Осницкого было выявлено влияние вероятностного прогнозирования на непреднамеренное запоминание событий. Предсказания и планы образуют как бы своеобразную координатную систему (систему «опорных точек»), относительно которой оцениваются действительные исходы событий. Эта система, определяемая стратегией прогнозирования, запоминается в первую очередь и служит как бы канвой для непреднамеренного запоминания действительных событий. Иначе говоря, запоминание происшедшего события зависит от того, насколько точно оно было предсказано.
Как же информация хранится в памяти человека? Оказывается, воспринятый материал не просто находится в мозге, он продолжает «ассимилироваться» мозгом и преобразовываться. Хранение информации, кроме того, связано с некоторой ее потерей. Воспринятая информация как бы рассеивается, теряется или, как мы говорим, забывается.
Забывание – довольно сложный и неравномерный процесс. Кривая забывания характеризуется прежде всего стремительным падением вниз, сразу же в первые часы после запоминания материала. Оказалось, что усвоенная информация наиболее значительно уменьшается за первые девять часов: со 100% она падает до 35%. Потеря информации составляет более двух третей от первоначального объема. Соответствующие подсчеты показывают, что процент сбережения усвоенного материала обратно пропорционален логарифму времени.
В психологии выделяют три вида забывания: 1) потеря информации из-за того, что она не используется, 2) потеря информации в результате интерференции (проактивной и ретроактивной), 3) забывание, обусловленное мотивацией.
Считается, что причиной первого вида забывания является «стирание следов» в нервной системе. Второй вид обусловлен действием закона индукции нервных процессов (отрицательной индукцией, т. е. развитием процесса торможения под влиянием возбуждения).
Проактивная интерференция возникает как результат влияния предшествующей деятельности на последующую (информация, запомненная во время деятельности, которая уже закончена, мешает запоминанию новой информации). Ретроактивная интерференция – это отрицательное влияние последующей деятельности на предшествующую (новая информация как бы подавляет старую).
Третий вид забывания выражается в том, что из памяти человека исключается тот материал, который противоречит мотивам деятельности (например, человек старается забыть то, что ему неприятно).
Потеря информации в кратковременной памяти связана главным образом со «стиранием следов», в долговременной – с нарушением системы кодирования информации.
Важное условие перевода информации из кратковременной памяти в долговременную – повторение запоминаемого материала. Одним из средств, препятствующих забыванию, является обзор (краткое воспроизведение) прошлого материала перед сообщением новых заданий.
Воспроизведение – процесс извлечения информации, хранящейся в памяти. Обычно мы судим о свойствах памяти по тому, насколько полно и точно человек воспроизводит запомненную информацию.
Так же как и запоминание, воспроизведение может быть преднамеренным (произвольным) и непреднамеренным (непроизвольным). В первом случае воспроизведение выступает как целенаправленный процесс восстановления хранимой информации. Иногда он связан с преодолением определенных затруднений. Во втором случае информация как бы всплывает сама собой. Эффективность воспроизведения, как преднамеренного так и непреднамеренного, существенно зависит от организации хранимой информации. Воспроизведение – это не просто механическая калька запомненного, а сложный процесс, включающий определенное преобразование информации. При произвольном воспроизведении человек пользуется определенными приемами поиска информации в памяти.
Экспериментально показано, что в условиях общения человека с другими людьми воспроизведение бывает более полным и точным по сравнению с воспроизведением в условиях индивидуальной деятельности. Стратегия поиска хранящейся в памяти информации в условиях общения также оказывается иной.
Проведено большое количество исследований по изучению взаимосвязи памяти, процессов восприятия и мыслительных процессов. Изучались характеристики оперативной памяти (объем, лабильность, точность и помехоустойчивость) при решении человеком сравнительно простых задач.
Сравнительные исследования эффективности различных кодов, используемых для передачи информации человеку: цифры, буквы, цвет, геометрические фигуры, конфигурации, – выявляют зависимость их эффективности от характера оперативных задач. Эти данные показывают, что при решении различных задач по-разному складываются взаимоотношения психических функций. В одних случаях ведущую роль играют процессы восприятия, в других – оперативная память, в-третьих – мыслительные процессы. Это, по-видимому, и объясняет указанные различия: код, оптимальный для одного процесса, может оказаться неоптимальным для другого.
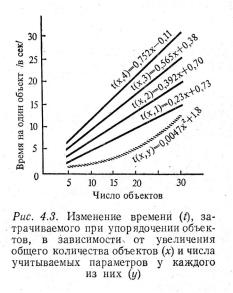
Нагрузка на оперативную память особенно велика при решении оператором задачи упорядочивания объектов. Для оценки времени решения такого рода задач получена следующая эмпирическая зависимость:

где t(х,у) – время, затрачиваемое на один объект; х – число упорядочиваемых объектов; у – число параметров объектов.
При заданном числе параметров зависимость t от х выражается прямой линией (рис. 4.3). Угол наклона прямой изменяется вполне закономерно при увеличении числа параметров. При соответствующей тренировке влияние числа параметров на время решения задачи упорядочивания может быть снято. Анализ процесса тренировки показывает, что у испытуемых формируются более экономные маршруты поиска и упорядочивания, происходит автоматизация мнемонических действий. В ходе такой тренировки формируются все более и более крупные оперативные единицы памяти.
При решении оперативных задач, требующих значительной нагрузки на память, наиболее эффективными являются те коды, пользуясь которыми легче образовать более крупные оперативные единицы памяти. Проводилось сравнительное изучение одномерного, двухмерного и трехмерного способов кодирования с точки зрения легкости усвоения, скорости и точности опознания символов. Эти исследования показывают, что объем оперативной памяти находится в пределах 4–5 единиц. Число измерений символов (мерность кода) не оказывает на него существенного влияния. Вместе с тем объем оперативной памяти зависит от того, в какой мере запоминаемый материал поддается быстрой логической обработке. Такая обработка выражается прежде всего в группировке символов и перекодировании групп, т. е. в формировании более крупных единиц. Преобразование запоминаемого материала осуществляется двумя основными способами. Первый из них связан с уменьшением неопределенности материала за счет обнаружения его организации (избыточности), второй ведет к уменьшению неопределенности в материале путем внесения организации на основе соотнесения объектов по каким-либо выбранным испытуемым параметрам.
Оперативное мышление
Центральное место в деятельности оператора занимает решение тех или иных задач, возникающих в ходе процесса управления. Оператор, участвующий в сложных системах управления, имеет дело с проблемными ситуациями, он должен осмыслить их, выявить задачу и найти пути ее решения. При этом нередко оператор ограничен временем, опоздание становится равносильным ошибке и может привести к еще большему усложнению проблемной ситуации, а иногда и к частичному или полному нарушению работы всей системы.
Мышление – активный процесс отражения объективного мира в человеческом мозгу в форме суждений, понятий, умозаключений. Мышление как социально обусловленный психический процесс неразрывно связано с речью (и языком). В отличие от ощущений, восприятий и представления мышление есть процесс обобщенного и опосредствованного отражения действительности. Различают наглядно-действенное, наглядно-образное, словесно-логическое, оперативное и теоретическое мышление.
Наглядно-действенное мышление – анализ и синтез познаваемых объектов в процессе практической деятельности с ними.
Наглядно-образное мышление – процесс трансформации перцептивных образов и представлений объектов (например, мысленное вращение объекта, его реконструкция и т. п.). Теоретическое мышление выступает в форме отвлеченных понятий и рассуждений.
Образное мышление – процесс отражения и соотношение текущей информации о состоянии объекта с ранее накопленной информацией. Понятийное и образное мышление в реальной трудовой деятельности выступают в тесном единстве, переходят одно в другое, что обеспечивает конкретное отражение проблемной ситуации.
Словесно-логическим или понятийным мышлением называется процесс отражения в создании человека существенных связей и отношений между предметами и явлениями материального мира.
Для инженерной психологии особое значение имеет оперативное мышление. Под оперативным мышлением понимается такой процесс решения практических задач, в том числе и задач управления, в результате которого формируется субъективная модель предполагаемой совокупности действий (плана операций), обеспечивающей решение поставленной задачи. Оно включает выявление проблемной ситуации и систему ее мысленных и практических преобразований. Проблема оперативного мышления была впервые наиболее полно раскрыта Б. М. Тепловым на примере деятельности полководца. Он показал, что для развитого практического интеллекта характерно умение «быстро разбираться в сложной ситуации и почти мгновенно находить правильное решение», т. е. то, что обычно называется интуицией, в которой своеобразно соединены образное (наглядное) и словесно-логическое мышление. Отражение общих свойств и существенных взаимосвязей между явлениями здесь сочетается с преобладанием наглядности. Наглядный образ ситуации как бы вбирает в себя всю ту сумму знаний, которая получена путем дискурсивного мышления. Интуиция предполагает высокое развитие пространственных и временных представлений. Выводы, к которым пришел Б. М. Теплов, представляют большой интерес для инженерной психологии, поскольку деятельность оператора во многих отношениях аналогична деятельности полководца (сложность обстановки, дефицит времени, необходимость учета противодействующих сил, высокая ответственность за каждое решение).
Основными компонентами оперативного мышления являются структурирование (которое проявляется в образовании более крупных единиц на основе связывания элементов ситуации между собой), динамическое узнавание (узнавание частей конечной ситуации в исходной проблемной ситуации) и формирование алгоритма решения (выработка принципов и правил решения задачи, а также в каждом конкретном случае определение последовательности действий). Выявлено три этапа процесса решения. На первом этапе наблюдается стремление действовать только с одним элементом ситуации: каждый элемент выступает здесь как одномерный вектор. На втором этапе имеет место группировка элементов определенным образом. Третий этап состоит в выработке общих принципов решения данной задачи, обеспечивающих соединение элементов в инвариантные подгруппы и разъединение неудовлетворительно (с точки зрения задачи) связанных элементов. В деятельности оператора существенную роль играет образное или наглядное мышление, т. е. оперирование представлениями реальной ситуации, воссозданными на основе принятой и декодированной информации.
Мышление оператора не исчерпывается принятием дедуктивных решений, так как его деятельность обычно протекает в затрудненных условиях, а обслуживаемая им техника чрезвычайно сложна. Поэтому оператор должен не только соотносить информацию с управляемым объектом, но и реконструировать ее.
В большинстве случаев оператор обнаруживает сигнал на фоне шумов. И здесь информация преобразовывается таким образом, что по заданному следствию нужно найти вызвавшую его причину. Только в этом случае оператор сможет уверенно выделить сигнал на фоне шума, восстановить искаженный образ сигнала. В отличие от дедуктивных решений, где оператор переходит на основе знания инструкции от причины к следствию, от сигнала к действию, в данном случае его мышление развивается как бы в противоположном направлении от следствия к причине. Движение мысли от следствия к причине принято называть абдуктивными операциями, а находимые таким путем решения – абдуктивными. Абдуктивные решения в отличие от дедуктивных характеризуются большей степенью неопределенности, так как одно и то же следствие (один и тот же сигнал) может вызываться (искажаться) разными причинами.
Процесс переработки информации человеком схематично можно представить себе в следующем виде (рис. 4.4). Первый шаг – выделение сигнала на фоне шумов (Д). Он включает процесс обнаружения и частичного опознавания. Уже на этом первом этапе определенную роль играют следы – энграммы, заложенные в памяти в прошлом опыте. Второй шаг – опознавание сигналов путем сравнения с эталонами – энграммами. Этот этап называется этапом предварительной обработки информации и включает в себя решение таких задач, как отнесение образа к классу и преобразование его в вид, удобный – для дальнейшей обработки информации и принятия решения. Третий и последующий шаги по переработке информации могут идти по двум каналам, которые принято считать самостоятельными, – поисковому и автоматизированному. В основе поискового канала лежат формирование и торможение условных рефлекторных связей типа ассоциаций по времени, сходству, противоположности и пространственному совмещению. При этом происходит преобразование (трансформация) образов, понятий, признаков. Механизм автоматизированного замыкания, очевидно, представляет собой прочно закрепленные условнорефлекторные связи.

Для многих видов операторской деятельности характерно мышление образами. Мыслительная деятельность летчика, штурмана корабля, диспетчера аэропорта и многих других операторов неразрывно связана с трансформацией образов управляемых объектов. Всем этим операторам присуще образное видение объектов. Так, например, управляющие действия летчика обусловлены образом пространственного положения самолета, штурман действует исходя из представления о положении корабля относительно берегов, диспетчер аэропорта принимает решение в соответствии с образом воздушной обстановки. Оперативный образ формируется на основе соотнесения текущей информации о состоянии объекта с той информацией о нем, которая ранее была накоплена оператором. Развитие оперативного мышления может быть активизировано различными приемами, способами методического порядка, например, через создание оперативных образов. Оперативный образ формируется на основе соотношения текущей информации о состоянии объекта с той информацией о нем, которая ранее была накоплена оператором.
Эвристические машинные программы
Моделирование процессов мышления, с одной стороны, открывает широкие возможности перед кибернетикой по созданию машин, решающих задачи. С другой стороны, использование средств кибернетики и ее метода – моделирования – способствует более глубокому изучению механизмов работы мозга. Моделирование – один из универсальных методов познания явлений, объектов, для которых непосредственное исследование затруднительно или по каким-либо причинам вообще невозможно. Модель как средство познания основана на заключениях по аналогии. Модель является упрощенным описанием прототипа, но упрощенным лишь настолько, чтобы она, оставаясь пригодной для замещения прототипа, одновременно позволила бы получить о нем новые знания. Модель может выполнять как теоретические функции, так и практические. Например, программа вычислительной машины, выступая в качестве модели некоторых сторон мыслительной деятельности, является также средством исследования и средством автоматизации умственного труда.
Моделирование некоторых моментов мышления человека в известной мере может быть реализовано на основе эвристических машинных программ. Здесь идет речь об информационном динамическом моделировании. К основным особенностям эвристических машинных программ относятся: использование специальных информационных алгоритмических языков (типа IPL, FLPL, LISP и др.), состоящих из определенных символов и «операторов» для работы с ними (эти языки более удобны для записи сложных алгоритмов); введение ассоциативно-списочной памяти, в которой списки делятся на подсписки, а различные списки объединяются в более крупные информативные структуры. Подобная память обеспечивает запоминание сведений, связанных между собой по смыслу, организует быстрый поиск необходимого сообщения, неограниченную запись новой информации в разных участках памяти с использованием адресной системы. При этом необходимые перестановки счетчика команд производятся обычно как результат операции логического решения; непрерывная реорганизация, перекомбинация информации в процессе функционирования программы; иерархическая структура программы, включающая систему подпрограмм; динамическая перестройка программы в ходе решения задачи.
Перечисленные особенности позволяют моделировать некоторые принципы и механизмы эвристической деятельности человека, его мышления. Для эвристических машинных программ характерны переработка нечисленной информации и известная гибкость, позволяющая решать практические задачи посредством таких логических приемов, которые производятся путем сравнения.
Определен ряд способов, с помощью которых ЭВМ может решить поставленную задачу, если алгоритмы ее заранее полностью неизвестны. К этим эвристическим способам относятся:
поиск правильного решения из некоторого множества путем перебора;
ограничение перебора вариантов за счет опознания объектов исследования по некоторому набору их признаков;
обучение машины стратегии поиска на основе закрепленного опыта; г) сокращение поиска путем предварительного грубого планирования;
нахождение закономерностей в исходных данных (индукция).
Количество этих способов может быть увеличено. Причем каждый из них включает свои подспособы. В последнее время ведутся работы по разработке программ, способных к постановке вопросов и к ответам на них, к диагнозу по косвенным признакам, к формулированию гипотез.
Известный интерес в этом отношении представляет программа А. Ньюэлла, Дж. Шоу и Г. Саймона «General problem Solver» («Универсальный решатель проблем»). Суть программы по решению проблем сводится к преобразованию исходной ситуации, обладающей определенными состояниями, в желаемую, с использованием набора «операторов». Работа программы сводится: а) к оценке поставленной цели и имеющихся данных; б) к планированию достижения цели и выбору наиболее приемлемого метода; в) к испытанию выбранного метода. Наиболее часто используются метод «преобразования» логических решений, заключающийся в сличении двух ситуаций и определении различия между ними; и метод «применения», состоящий в определении целесообразности использования того или иного «оператора» для решения задачи. Фактически программа разбивается на подпрограммы, в каждой из которых решается своя подцель. То есть создается упрощенная модель задачи с ограниченным перебором вариантов, но без полной гарантии получения оптимального решения. Рассмотренные программы еще далеки от человеческих эвристик. По сути дела, в них решается не творческая мыслительная задача, а более простая лабиринтная задача с известными областями поиска, начальной площадкой и конечной целью. Для выработки новых алгоритмов в ходе решения используется методика перебора вариантов (проб и ошибок), но с известным сокращением. Моделируются лишь отдельные стороны мыслительной деятельности человека. Путь оптимизации программ – в приближении их к человеческим эвристикам, особенностям концептуальной модели, формируемой человеком.
Видимо, для решения перспективных технических задач большое значение имеет моделирование не только информационных процессов мозга, но и его функционально-структурных особенностей. Прежде всего речь идет об изучении и использовании принципов работы сложных нервных сетей, их алгоритмической структуры, что крайне важно для построения общей теории синтеза автоматов.
При решении практических задач большое значение имеет комплексное моделирование различных психофизиологических функций человека, а также деятельности человека-оператора как интегрального звена конкретной системы управления. В первом случае речь идет о построении некоторых комплексных автоматических устройств. Так, например, разрабатывается программа «глаза–руки», которая предусматривает моделирование работы зрительного анализатора человека, некоторых элементов мышления и определенной системы движений. Целью такой программы является создание комплексных технических устройств, предназначенных для обследования планет. Во втором случае речь идет о моделировании деятельности человека в интересах оптимизации взаимодействия системы «человек – машина».
Принятие решения в деятельности оператора
Психологические аспекты проблемы принятия решения
На основании принятой и проанализированной информации оператор принимает необходимое решение по управлению. Процедура принятия решений является центральной на всех уровнях приема и переработки информации. В этой процедуре наиболее полно реализуются как отражательные, так и регуляторные функции психики.
В самом общем виде процедура принятия решения включает формирование последовательности целесообразных действий для достижения цели на основе преобразования некоторой исходной информации,
К основным объективным и субъективным условиям, определяющим реализацию процессов решения в деятельности оператора, можно отнести:
наличие дефицита информации и времени, стимулирующего «борьбу» гипотез;
наличие некоторой «неопределенностной ситуации», определяющей борьбу мотивов у субъекта, принимающего решение;
осуществление волевого акта, обеспечивающего преодоление неопределенности, выбор гипотезы, принятие на себя той или иной ответственности.
Условия принятия решения во многом зависят от степени неопределенности. В этой связи различают следующие виды неопределенности: обусловленную большим числом объектов, включенных в ситуацию; вызванную недостатком информации в силу технических и иных причин; порожденную слишком высокой или недоступной платой за определенность, вносимую субъектом, принимающим решение. Очевидно, что процедура принятия решения и его качество в различных ситуациях неопределенности будет иметь разный характер. Поэтому в зависимости от состояния исходной информации могут быть три вида решения: детерминированное, вероятностное, предельное. Однако в любом случае в процессе принятия решения необходимо разумное снижение неопределенности.
С системных позиций проблема выработки и принятия решения условно имеет следующие основные аспекты логико-психологический, операциональный, функционально-динамический, формализованный. Отдельно можно выделить личностный аспект, связанный с влиянием мотивационно-установочной и эмоционально-волевой сфер на протекание информационных процессов у человека.
С логико-психологической точки зрения процесс переработки информации и принятия решения (в рамках решения задачи) связан с формулированием задачи, поиском, накоплением и регулированием информации, необходимой для принятия решения; выявлением и оценкой проблемной ситуации; выделением (построением) системы гипотез; реализацией выдвинутой программы действий.
С операциональной точки зрения процедура принятия решения складывается из информационной подготовки и собственно принятия решения. В данном случае речь идет о системе преобразований с использованием определенных методов и приемов. Так, например, показано, что для деятельности оператора в системах контроля и управления информационная подготовка принятия решения складывается из «внешнего» и «внутреннего» информационного обеспечения.
Основное содержание внешнего информационного обеспечения состоит из реализации двух проблем. Первая из них включает вопросы определения количества и качества информации, необходимой и достаточной для принятия решения в том или ином случае. Вторая проблема связана с вопросами оптимального представления этой информации оператору.
Внутренняя подготовка принятия решения сводится к процедурам, объединенным в две группы:
поиска, выделения, классификации и обобщения информации о проблемной ситуации;
построения текущих образов, или оперативных концептуальных моделей.
Процедура выработки самого решения условно может быть описана следующими операциями: предварительное выдвижение системы эталонных гипотез; сопоставление текущих образов (концептуальных моделей) с рядом эталонов и оценка сходства между ними; коррекция образов (моделей) и «сообразование» гипотез с достигнутыми результатами; выбор эталонной гипотезы или построение ее, принятие решения (принципа и программы действий). Из сказанного видно, что рассмотренные операции также могут быть объединены в две группы: структурного сопоставления текущих и эталонных образов (моделей) и их преобразования (построения).
Функционально-динамические аспекты принятия решения связаны с реализацией комплекса внутренних психологических механизмов. Система этих механизмов до настоящего времени еще не ясна. По-видимому, организация процесса принятия решения весьма сложна и требует взаимодействия различных психологических механизмов. Что же касается самого акта принятия решения, то он одномоментен, подчиняется некоторому универсальному, видимо, простому, но еще не выявленному закону.
В общем виде можно говорить, что подготовка решения связана с функционированием механизмов информационного и информационно-эвристического поиска. Несомненно, что поисковые программы опираются на структурный анализ воспринимаемой информации. Выработка решения связана с функционированием системы структурных, логических и вероятностных механизмов. Первые преобладают при реализации операций построения образов (моделей), их сопоставления, установления соотношения между ними. Среди них при переработке динамической информации особый интерес представляют механизмы, обеспечивающие сопоставление текущей информации с ранее запечатленной в кратковременной и долговременной памяти в целях ее оценки и коррекции. Вероятностные механизмы преобладают при реализации априорных процедур, операций выбора и оценки гипотез в сложных условиях, в условиях риска. Однако резкой границы между сферами действия обеих групп механизмов нет; причем сами они нередко содержат эвристические компоненты. В целом же процессы принятия решений имеют детерминированно-стохастическую природу.
Формализованное описание процедур принятия решения складывается из двух частных проблем:
количественного описания входных и выходных данных,
формализованного описания самих процессов.
Первая проблема решается более просто. Для ее решения используется различный математический аппарат. Так, для формального построения гипотез решений может быть использован факторный анализ, для количественной оценки истинности и эффективности гипотез – аппарат теории вероятностей и статистических решений, а также теории игр и массового обслуживания. Во многих случаях возможно применение методов теории информации.
Вторая проблема реализуется значительно сложнее. Формальное описание (моделирование) процессов принятия решения возможно лишь на основе использования методов, обладающих определенными лингвистическими возможностями. К ним прежде всего можно отнести аппарат формальных грамматик.
Общие требования к формальным моделям психических функций (в том числе и процессов принятия решений) сводятся к следующему. Модели должны вписываться в более общую модель и быть основой для детализации более частных моделей; выполнять определенные информационные функции, выявлять новую информацию о структуре моделируемых процессов, обеспечивать прогнозирование их функционирования; быть физически реализуемыми и обладать практической полезностью. Кроме того, они должны соответствовать содержательным психофизиологическим моделям.
Личностные аспекты процессов принятия решений человеком связаны с выявлением влияния эмоционально-волевой и мотивационно-установочной сфер на протекание информационных процессов. Прежде всего необходимо подчеркнуть, что процесс принятия решения представляет собой особую стадию волевого действия, реализуемого в рамках сложного волевого акта. Это действие связано как с подготовительным этапом волевого акта, с постановкой и осознанием цели, так и с этапом исполнения и оценки принятого решения. При этом нужно учитывать, что волевые процессы всегда усложняются за счет действия эмоциональных факторов.
Принятие решения весьма индивидуально. На основе выявления индивидуальных типологических различий предложена классификация типов решений. При этом учитывалось соотношение процессов построения (А) и контроля выдвигаемых гипотез (К). В зависимости от этого различаются следующие типы решений:
А « К – импульсивные решения (процессы построения гипотез резко преобладают над контрольными процессами);
А > К – решения с риском;
А = К – уравновешенные решения;
А < К – осторожные решения;
А « К – инертные решения (контрольные процессы резко преобладают над процессами построения гипотез, протекающими медленно и неуверенно).
Наиболее эффективными при наличии необходимых знаний оказываются операторы, склонные к принятию решений с риском, но обладающие осмотрительностью.
На процессы принятия решения большое влияние оказывает и «эмоциональный феномен», обеспечивающий снятие неопределенности на основе действия механизмов эмоций. Экспериментально показано, что без эмоциональной активации невозможно решение субъективно сложной мыслительной задачи. Эта активация порождается как общей ситуацией, в которой протекает деятельность (ситуационные эмоции), так и результатом интеллектуального процесса (интеллектуальные эмоции). При решении простых задач роль ситуационных эмоций разного знака однозначна; при решении творческих задач отрицательные эмоции, как ни парадоксально, могут играть положительную роль (при эмоциональном подкреплении «наводящей» задачи). Поэтому можно ставить вопрос об управлении процессами решений за счет искусственно создаваемой эмоциональной активации.
Интересными являются также результаты исследований мотивационных основ решения задачи. Эксперименты проводились в группах с разной мотивационной установкой: сделать как можно лучше; сделать не хуже других; лишь бы сделать. Эффективность решения задачи в первой группе в 1,5 раза выше второй и в 2 раза выше третьей. В заключение необходимо подчеркнуть, что структура и механизмы процедуры принятия решения не являются стабильно-универсальными на разных уровнях психического отражения. Они изменяются при переходе от перцептивно-опознавательного уровня к речемыслительному, ибо каждый уровень представляет собой качественно новое структурно-системное образование. Главное здесь заключается в переходе от перебора и выбора гипотез к построению гипотез (концептуальных моделей).
Принятия решения на перцептивно-опознавательном уровне
Процесс переработки информации и принятия решения на перцептивно-опознавательном уровне представляет собой решение определенной задачи и складывается из ряда этапов и операций. Структура подобной задачи особенно отчетливо проявляется при обработке первичной (оптические, радиолокационные, фотоэлектронные изображения) и приборной информации в затрудненных пространственно-временных условиях.
С логико-психологической точки зрения процесс решения перцептивно-опознавательной задачи может быть расчленен на ряд этапов, связанных с нахождением информации и выработкой решения. К этим этапам относится: поиск и обнаружение сигналов, их различение и опознание, декодирование и принятие решения об «итоговом» образе.
С операциональной точки зрения данный процесс включает специфическую перцептивную подготовку принятия решения и саму процедуру принятия решения. Причем реализуются эти процедуры в той или иной степени на каждом из этапов принятия решения.
В процессе обнаружения происходит установление наличия стимула в информационном поле без определения границ формы контура и других свойств воспринимаемого стимула. В статистическом смысле здесь решается задача вероятностного отнесения стимула к одной из двух категорий: «сигнал/шум» или «шум».
В процессе различения осуществляется сравнительный анализ стимулов между собой, в первую очередь, на основе различения яркостных контрастов и выделения контура. Операция выделения контура реализуется по принципу так называемой параллельно-последовательной развертки, что обеспечивает расчленение комплексного стимула на элементы и последующее объединение их в определенную систему.
В процессе опознания и декодирования происходит идентификация стимулов, т. е. отнесение их к некоторому множеству образов, в результате чего оказывается возможным соотнесение стимулов с реальными объектами. Этот процесс состоит из нескольких стадий: выделение и анализ информационных признаков, формирование зрительного образа, альтернативный выбор гипотезы и окончательное опознание.
Процесс анализа признаков имеет сложный характер и включает в себя: выделение элементарных признаков (например, углов и линий при восприятии плоских фигур), мысленную численную оценку их градаций, преобразование элементарных признаков в более укрупненные, выделение наиболее информативных из этих признаков, вероятностное распределение признаков по гипотезам с учетом их весовых характеристик.
Параллельно с выделением и анализом признаков происходит формирование и запоминание перцептивного образа объекта. Специальные исследования свидетельствуют о фазности процесса становления перцептивного образа. Этот образ является своеобразным психическим изображением объектов внешней среды.
Рассматриваемые до сих пор процессы представляют собой перцептивную подготовку принятия решения. Сама же процедура решения совершается следующим образом. Опознавательный процесс связан с опознавательными действиями, под которыми понимается процедура отнесения того или иного стимула к одному из N классов стимулов. Формально опознание имеет место, когда N > 2.
Процесс развернутого опознания стимулов может быть описан следующими операциями:
предварительное выдвижение системы эталонов некоторого класса объектов;
сопоставление текущего образа с рядом эталонов и оценка результатов сопоставления;
выбор «эталонной» гипотезы и ее проверка;
принятие решения – словесное формулирование ответа или смена эталона.
Рассмотрим каждую из этих операций.
Предварительное выдвижение системы эталонов стимулируется поставленной задачей и априорной информацией, которая может иметь количественный (вероятности распределения объектов) и качественный (сведения об окружающей ситуации) характер. Опознавательный процесс зависит от трансформации объективно существующих априорных вероятностей объектов в субъективные.
Для выявления роли количественной априорной информации был поставлен следующий эксперимент. Двум группам испытуемых по 10 человек было предложено опознать фотоизображения объектов (геометрических фигур) низкой степени разрешения: R1= 12 мин/мм и R2 = 19 мин/мм. В экспериментальной группе указывалась вероятность предъявления фотоизображений, в контрольной группе вероятность не сообщалась. В каждой группе было сделано по 2000 предъявлений, результаты опознания представлены в табл. 5.1.
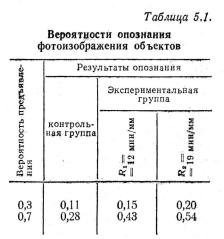
Как видно, знание априорных вероятностей предъявления объектов, особенно при затрудненных условиях их восприятия, способствует повышению результатов опознания, причем в большей степени для более высоковероятных объектов. Это положение имеет особенно большое значение для правильной организации операторской деятельности.


 Системный
подход к построению образов дает
возможность выдвинуть гипотезу о
структурном характере их сопоставления
с использованием некоторых вероятностных
и эвристических процедур. На каждом
уровне сопоставления используется,
очевидно, своя система эталонов,
отличающихся по структурной целостности
и «категориальной» значимости. При
сопоставлении образов идет активная,
избирательная переработка информации,
связанная с поиском отличительных
признаков между образами и установлением
отношений между ними. Завершается
опознание альтернативными ответами
или переходом на более определенный
уровень.
Системный
подход к построению образов дает
возможность выдвинуть гипотезу о
структурном характере их сопоставления
с использованием некоторых вероятностных
и эвристических процедур. На каждом
уровне сопоставления используется,
очевидно, своя система эталонов,
отличающихся по структурной целостности
и «категориальной» значимости. При
сопоставлении образов идет активная,
избирательная переработка информации,
связанная с поиском отличительных
признаков между образами и установлением
отношений между ними. Завершается
опознание альтернативными ответами
или переходом на более определенный
уровень.
Процедура выбора «эталонной» гипотезы иллюстрируется с помощью рис. 5.1. Информация об опознаваемом объекте через приемник сигналов поступает в блок исследования признаков и формирования образа. В этот же блок из долговременной памяти поступают эталонные гипотезы, которые проходят через блок учета априорных вероятностей. На основании учета априорной информации, поэлементного или целостного сопоставления сформированного образа с эталонами выбирается гипотеза и оценивается ее апостериорная вероятность В простых случаях, при опознании отдельных объектов на основе использования независимых, равновероятных, прямых признаков, этот процесс с известной степенью приближения описывается теоремой Байеса:
 (5.1)
(5.1)
где
 – апостериорная вероятность гипотезы
Ni
при использовании признака
– апостериорная вероятность гипотезы
Ni
при использовании признака
 ,
,
 – априорная вероятность появления
объекта Ni,
– априорная вероятность появления
объекта Ni,
 – условная вероятность признака
при наличии объекта Ni.
– условная вероятность признака
при наличии объекта Ni.
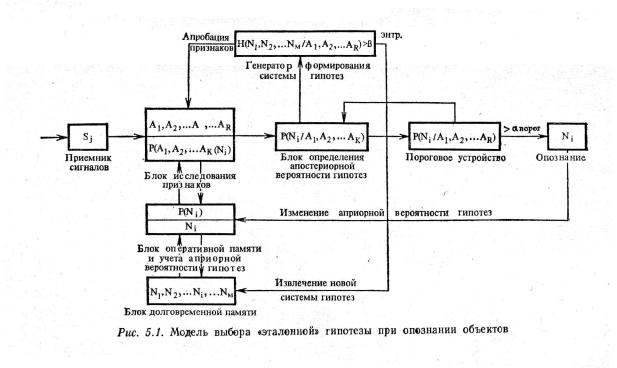
Апостериорные вероятности гипотез сравниваются с порогом αпор. При превышении его происходит опознание. Регуляция процесса исследования признаков, сопоставления образов и ввода новой серии эталонных гипотез осуществляется через генератор системы гипотез. Как только вероятность одной из гипотез достигнет необходимого максимума, энтропия данной системы гипотез падает ниже величины Нmin и исследование признаков, сопоставление образов прекращается. Опознание объекта на основании обратной связи изменяет априорные вероятности гипотез в оперативной памяти. Если порог опознания не будет превзойден, через генератор системы гипотез вводится новая серия гипотез и осуществляется экстраполяция к ним. Как видно, в ходе проверки гипотез происходит перераспределение их вероятностей.
Из всего сказанного видно, что решение задачи и принятие решения на опознавательном уровне сводится, во-первых, к выделению информации о воспринимаемых объектах и, во-вторых, к логической обработке извлеченной информации, включая оценку выдвинутых эталонных гипотез, их проверку и принятие окончательного решения о классе опознаваемых объектов.
Рассматриваемая до сих пор схема решения опознавательной задачи справедлива лишь для относительно простых случаев. Очень часто информация, предъявляемая оператору с первичных информационных моделей (оптические, радиолокационные, фотоэлектронные, картографические и другие изображения), имеет «зашумленный» характер. Примерами его являются: действие радиолокационных и тепловых контрастов, большая информационная емкость при загрубленности и искажении элементов структуры, крайняя структурная неоднородность, наличие неоднозначных связей между элементами моделей и реальных объективов.
Процесс решения опознавательной задачи в этих условиях существенно отличается от рассмотренного выше. В результате проведенных экспериментальных исследований по восприятию зашумленных изображений была выдвинута гипотеза о слойно-ступенчатой природе решения перцептивной задачи в этих условиях. Процесс решения подобной задачи включает:
«послойный» анализ структуры изображений, при котором происходит движение от слоев с крупноразмерными элементами к слоям с мелкоразмерными элементами;
ступенчато-этапную обработку информации в пределах слоя;
формирование на выходе слоев промежуточных образов с по следующим их укрупнением;
экстраполяцию этих образов к эталонам различного информационного содержания.
Указанные процедуры опираются на сложное взаимодействие эвристических и вероятностных механизмов. Подробное их описание является сложной задачей и приводится в специальной литературе.
Особенности принятия решения на речемыслительном уровне
Более сложным уровнем принятия решения по сравнению с рассмотренным в предыдущем параграфе является рече-мыслительный, большая роль в котором принадлежит оперативному мышлению.
В общем виде в оперативном мышлении можно выделить:
алгоритмический уровень, связанный со строго последовательной реализацией мыслительных операций в соответствии с заданной программой;
эвристический уровень, связанный с нахождением новых связей и отношений между объектами и явлениями.
В реальной деятельности оператора оба эти уровня мышления тесно переплетаются между собой.
Особенно велика в процессе принятия решения оператором роль эвристики, ибо простые переборы всех возможных вариантов не всегда возможны. В самом деле, если оценка обстановки, необходимая для принятия решения, включает всего семь элементов (например, давление пара, температура в котле и т. п.), то число логических условий, требующих анализа и проверки, на основании элементарной формулы сочетаний достигает величины 42, а при двухградационной характеристике (давление пара может увеличиваться или уменьшаться) возрастает в геометрической прогрессии. Очевидно, если все логические условия будут полностью анализироваться, оператор не сможет принять решения, а ведь зачастую речь идет о принятии решения в течение нескольких минут или даже секунд.
С логико-психологической точки зрения процесс решения задачи на мыслительном уровне может быть расчленен на этапы, приведенные на рис. 5.2.

С операциональной точки зрения на каждом из указанных этапов осуществляются процедуры как информационной подготовки принятия решения, так и самого решения. При этом необходимо отметить, что процесс принятия решения значительно усложняется при классификации и прогнозировании событий.
Психологические механизмы принятия решения, «сообразование» гипотез с достигнутыми результатами на каждом из этапов логико-психологической модели решения задачи рассмотрены в работе. Суть их сводится к следующему.
Первоначально выполняется преобразование исходной информации, сопоставление полученных результатов с требованиями задачи, при их сообразовании – перевод требований в функциональный план и построение на этой основе общей функциональной гипотезы решения, определяющей «зону поиска». Затем осуществляется сопоставление результатов дальнейшего преобразования информации с общей функциональной гипотезой, ее корректировка, уточнение и преобразование в «специфицированную» гипотезу о конкретном способе решения. После этого определяется конечный результат решения на основе функционирования специфицированной гипотезы, который снова удовлетворяет начальными требованиями задачи.
Короче говоря, оператор, исходя из требований и условий задачи (Р), последовательно переходит к общей гипотезе (GH), затем к специфицированным гипотезам (SH) и, наконец, находит конечный результат.
Из изложенного видно, что общая логико-психологическая структура решения задачи по своему строению имеет «каркасный» характер. Этапы связаны прямыми и обратными связями. При этом каждый из этапов обладает по отношению к предыдущим этапам характером решения, а по отношению к последующим – характером проблемы. В основе решения задачи лежит непрерывное ее переформулирование, построение предварительной концептуальной модели и трансформирование ее в конечную концептуальную модель решения исходной проблемной ситуации. Концептуальная модель имеет сложное строение и формируется в результате взаимодействия входящих в ее состав структурных и статистических компонентов. Структурные компоненты связаны с анализом проблемной ситуации, статистические – с использованием априорной информации.
Приведенная структурная схема процесса принятия решения носит общий характер. Она может изменяться в зависимости от конкретного вида операторской деятельности. Однако учет изложенных закономерностей принятия решения имеет большое значение для правильной организации деятельности оператора. Рассмотрим это на конкретном примере осуществления оператором поиска отказов и неисправностей.
Поиск неисправностей является одной из разновидностей решения задачи на речемыслительном уровне. В ходе поиска оператор вынужден устанавливать различные связи между элементами решаемой задачи. Эти связи устанавливаются, однако, не со всеми элементами, а лишь с ограниченным их числом. Выбор характера связи производится на основе априорных соображений, которые и являются основой для формирования гипотез. Основой для их формирования являются знания оператора о системе – отражение статистических связей между элементами задачи. В процессе поиска число рабочих гипотез сокращается за счет включения в рассмотрение наиболее вероятных гипотез, реальность которых не подтверждена. Таким образом, в результате поиска наблюдается установление все новых связей между элементами задачи, т. е. происходит построение модели сложившейся ситуации. Иначе этот процесс может быть интерпретирован как поиск соответствия между проявлением неисправности и представлением о ней оператора.
Схематически процесс поиска неисправностей показан на рис. 5.3. Анализ приведенной на рис. 5.3 модели поиска показывает, что при разработке СЧМ следует предусмотреть возможность самостоятельного построения оператором алгоритма поиска неисправностей (установление динамических связей между элементами системы). Это может быть достигнуто как увеличением «контрольных» точек в аппаратуре, которые могут инцидироваться на информационной модели в процессе функционирования, так и большими возможностями для поэлементной реализации оператором алгоритма функционирования СЧМ с пульта управления. Особое значение это имеет при модульной конструкции аппаратуры СЧМ, когда задачей оператора является принятие решения на замену целого модуля, содержащего отказавший прибор или элемент.

Заканчивая рассмотрение вопросов принятия решения оператором, необходимо хотя бы кратко остановиться на факторах, определяющих эффективность этого этапа деятельности оператора. С известным приближением моделью процесса принятия решения оператором в системе управления могут служить задачи решения цепей силлогизмов различной длины. Силлогизмом называется задача следующего вида: А больше Б, Б несколько меньше В. Требуется найти соотношение А и В. Обнаружено, что на эффективность принятия решения большое влияние оказывают ограниченность времени и наличие стрессовых ситуаций, ведущих к появлению психической напряженности. Действие этих факторов приводит к задержкам в принятии решения и резкому снижению их качества. Например, при ограничении времени до 10 сек оператор не в состоянии решать силлогизмы и действует наугад.
Время принятия решения зависит и от числа логических условий, одновременно проверяемых оператором. Об этом, в частности, свидетельствуют данные, приведенные на рис. 5.4. С увеличением числа логических условий возрастает вероятность появления ошибок. При трех-четырех логических условиях быстрые безошибочные решения затруднительны. Эффективность принятия решения зависит от личностных свойств оператора и прежде всего от его мотивации к данной деятельности. Эти вопросы подробно рассматривались в первом параграфе данной главы.
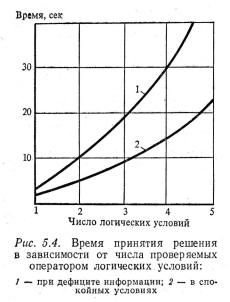
Управляющие действия оператора
Рабочие движения человека-оператора
Принятое оператором решение только тогда имеет смысл, когда оно правильно и своевременно будет реализовано. Реализация решения осуществляется путем ввода необходимой информации в машину. Для этого используются «выходные» каналы человека: двигательный (моторный) или речевой. Подавляющее число управляющих действий оператор осуществляет посредством движений. С помощью речевого управления пока можно решить лишь ограниченный круг задач.
Моторная деятельность оператора существенным образом отличается от подобной деятельности работников других профессий. Действия оператора внешне являются, как правило, очень простыми. Они сводятся к нажатию кнопок, включению тумблеров, повороту рукояток и т. п. и не требуют сами по себе специального обучения. Однако вся сложность управления переместилась с исполнительной части двигательных действий на центральные механизмы их регуляции.
Выполнение любого (внешне даже очень простого) управляющего действия оператором определяется переработкой большого количества информации, от правильного и своевременного выполнения этого действия зависит успех в реализации принятого решения.
Любое управляющее движение складывается из массы элементарных движений, объединяемых механизмом центральной регуляции в целостную структуру. Разные движения, включенные в такую структуру, имеют различное назначение, по которому их можно разделить на три группы:
рабочие или исполнительные движения, посредством которых осуществляется воздействие на орган управления;
гностические движения, они направлены на познание объекта и условий труда, к ним относятся осязательные, ощупывающие, измерительные и другие движения;
приспособительные движения, к ним относятся установочные, уравновешивающие и другие движения.
Структура двигательных компонентов и определяемые ею скорость и точность управляющего действия зависят от тех задач, которые решает оператор, а также от назначения органов управления, их конструкции, расположения в пространстве и других факторов.
По назначению органов управления все двигательные задачи можно разделить на четыре класса.
Операции включения, выключения и переключения. Манипулирование соответствующими органами управления строится по принципу простых реакций или реакций выбора, основной характеристикой которых является время реакции.
Двигательные задачи, заключающиеся в выполнении последовательного ряда повторяющихся движений, с помощью которых осуществляются операции кодирования и передачи информации. Характеристикой повторяющихся движений является их темп. По мере тренировки повторяющиеся движения становятся ритмичными.
Третий класс двигательных задач наблюдается при манипулировании с органами управления для настройки аппаратуры и точной установки управляемого объекта. В этом случае необходимо дозирование движений по их силовым, пространственным и временным параметрам в соответствии с некоторой заданной мерой. Основным фактором, определяющим их динамику, является точность дозировочных реакций.
Операции слежения за изменяющимися объектами. Задачи, выполняемые оператором в процессе движения, относятся к классу непрерывных перцептивно-моторных задач.
В физиологии труда разработаны и широко применяются на практике принципы экономии движений. Однако эти принципы в основном применимы для физического труда, они не являются главными в решении инженерно-психологических задач. Более того, их применение без учета закономерностей регуляции движений может привести к снижению эффективности управляющих действий. Эффективность действий оператора повышается при такой организации его моторного поля, которая обеспечивает оптимальные условия регуляции движений.
Для выполнения этого требования большое значение имеет правило совместимости индикаторов и органов управления. Его особенно важно соблюдать в тех случаях, когда требуется высокая скорость действий, когда оператор наряду с основной задачей должен решать дополнительные задачи и т. д. Для определения оптимального отношения органов управления к индикаторам важным является также вопрос о том, как относятся характеристики управляющего движения к тем или иным параметрам сигнала. При этом необходимо иметь в виду то обстоятельство, что точность регуляции движений по силе, амплитуде и скорости различна. Регуляция по силе является более простой, чем по амплитуде и тем более по скорости. Поэтому при конструировании органов управления необходимо учитывать возможности регуляции движений по каждому из перечисленных параметров и в соответствии с этим решать вопрос о выборе типа органа управления, его размера, положения и т. д.
Управляющие движения оператора характеризуются четырьмя группами характеристик – скоростными (временными), пространственными, силовыми и точностными.
Основной скоростной характеристикой операций включения является время двигательной реакции. Это время в общем случае зависит от расстояния R, на которое перемещается рука, и ширины органа управления W и определяется соотношением:
 (6.1)
(6.1)
где a и b – константы, численные значения которых равны a ≈ 0,07 сек, b ≈ 0,074 сек; Тр – комплексный индекс трудности.
Для повторяющихся движений основной характеристикой скорости является частота их повторения, или темп. Установлено, что максимальный темп вращательных движений 4,0–4,8 об/сек. Темп вращения существенным образом зависит от размеров ручек управления и величины их сопротивления движению. Так, например, наибольшая скорость достигается при радиусе ручки 3 см (при самых минимальных сопротивлениях). Если же сопротивление будет достигать 5 кГ, то максимальная скорость может быть достигнута при радиусе ручки в 4 см.
Максимальный темп нажимных движений при величине усилия 25 г для ведущей руки 6,68 нажимов/сек, для неведущей – 5,3 нажимов/сек. При увеличении усилия до 400 г темп уменьшается и составляет соответственно 6,14 и 5,59 нажимов/сек.
Максимальный темп ударных движений изменяется от 5 до 14 ударов в секунду. В среднем он равен 8,5 ударов/сек. Для продолжительного же периода работы оптимальный темп– 1,5–5,0 ударов в секунду.
В случаях, когда движение выполняется в ответ на часто поступающие внешние дискретные сигналы, человек способен реагировать на каждый сигнал только в том случае, если интервал между сигналами не менее 0,5 сек. Если же второй сигнал подается через более короткий промежуток времени, то начало реакции на него задерживается до завершения реакции на предыдущий сигнал.
Данный эффект называется психологической рефракторной фазой. К пространственным характеристикам движений оператора относятся размеры моторного поля (зоны досягаемости) и траектории движений. Моторная деятельность оператора характерна прежде всего тем, что моторные координации являются тонкими, и следовательно, в подавляющем большинстве случаев все движения осуществляются без перемещения туловища. Исходя из этого, размеры моторного поля (при неподвижном положении туловища) определяются длиной вытянутой руки оператора. В моторном поле различают три зоны; максимальной, допустимой и оптимальной досягаемости. Размеры этих зон в горизонтальной и вертикальной плоскостях показаны соответственно на рис. 6.1 и 6.2.

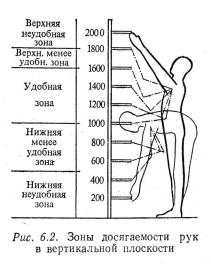
В зонах оптимальной и допустимой досягаемости возможны наиболее быстрые и точные движения при минимальной утомляемости оператора. Поэтому здесь рекомендуется располагать наиболее важные и часто используемые органы управления. Следует также отметить, что в зависимости от требуемых усилий и точности движений в этих зонах существуют некоторые рациональные уровни. Так, например, рычаги, требующие для своего перемещения больших усилий, следует размещать на нижних уровнях оптимальной зоны. Требования же к точности перемещения легче всего удовлетворяются на средних уровнях.
В зоне максимальной досягаемости точность и скорость управляющих движений заметно снижается, утомление наступает быстрее. Поэтому в этой зоне возможна лишь непродолжительная работа.
Для
количественной оценки удобства работы
человека в той или иной зоне досягаемости
вводится понятие коэффициента удобства,
равного

где Ту – время выполнения операций в наиболее удобной зоне; Тзон – время выполнения операций в данной рабочей зоне.
Установлено, что для зоны оптимальной досягаемости Ку = 1, для зоны допустимой досягаемости Ку = 0,9, для зоны максимальной досягаемости его значение составляет 0,3–0,6. За пределами зон досягаемости величина Ку может быть в отдельных случаях меньше 0,1.
Траектория движений может быть различной. Однако, несмотря на их практическую неограниченность, некоторые из траекторий являются наиболее предпочтительными. Например, экспериментальными исследованиями установлено, что эллиптические и круговые движения являются более выгодными по сравнению с прямолинейными; замена прямолинейных движений круговыми заметно увеличивает производительность труда и снижает утомляемость.
Движения человека определяются и силовыми характеристиками. Основной из них является величина усилия, развиваемая рукой при движении. Эта величина определяется характером движения (вытягивание, толкание, отведение и т. д.) и углом между плечом и вертикалью тела. Наибольшее усилие может быть развито при вытягивании на себя (54,4 кГ) и толкании от себя (62,6 кГ), наименьшее – при толкании вниз (18,6 кГ) и отведении от себя (15,5 кГ). Величина усилия, развиваемого человеком при вытягивании и толкании, резко падает при уменьшении угла между плечом и вертикалью тела. Максимальное усилие, развиваемое левой рукой, в среднем на 10–15% меньше, чем правой.
Силовые характеристики движений человека должны учитываться при выборе сопротивления органов управления. Необходимо только иметь в виду, что выше были приведены лишь максимальные значения усилий, развиваемых рукой человека. Фактические доставления органов управления должны быть значительно меньше этих усилий (табл. 6.1).

Для некоторых видов деятельности иногда отсутствует возможность осуществлять зрительный контроль в процессе двигательного акта. В этом случае большое значение имеют точностные характеристики движений оператора, т. е. возможностей человека по различению (без участия зрительного контроля) направления, размаха, длительности и силы движения. Эти характеристики особенно необходимо учитывать при организации дозированных движений.
Наиболее точные ощущения характерны для движений, совершаемых на расстоянии 15–35 см от средней точки тела. Уже на расстоянии 40–50 см точность анализа существенно снижается. Точность попадания рукой в нужное место на пульте управления составляет ±15 см в средней зоне ниже груди и ±30 см в крайних зонах.
Амплитуда движений наиболее точно оценивается в пределах 8–12 см. Более короткие амплитуды переоцениваются, более длинные недооцениваются. Движения сверху вниз обычно переоцениваются. Длительность движения может оцениваться с точностью 0,1–0,2 сек.
При изучении дозирования усилий выявлено, что оператор с большей точностью способен сохранять одно и то же усилие, чем изменять его в определенных пределах. Специальные тренировки позволяют значительно, повысить точность регулировочных усилий. Так, если до тренировки пороги различения веса и нагрузок находились в пределах 3–10%, то после тренировки различение веса осуществлялось уже с точностью до 1%.
Заканчивая рассмотрение характеристик управляющих движений, необходимо хотя бы кратко сказать об особенностях формирования двигательных навыков. В процессе их формирования изменяются взаимоотношения между видами движений. На первой ступени обычно преобладают гностические движения. Позднее они редуцируются и настолько тесно сливаются с рабочими движениями, что их трудно бывает разделить. В результате движения становятся более плавными и стабильными.
На начальных ступенях образование двигательного навыка происходит под контролем зрения; впоследствии же этот контроль все более переходит к чувствительным приборам двигательного аппарата – к тактильному и кинестетическому анализаторам. При этом образуется внутренний контур регулирования, определяемый действием этих анализаторов, в котором сигналы проходят значительно быстрее (0,4 сек), чем по внешнему контуру регулирования, включающему зрительный контроль (1–2 сек). Это важное свойство может быть использовано также для повышения качества управления путем подачи сигналов обратной связи не на зрительный, а непосредственно на тактильный анализатор. Это связано с тем, что знание оператором результатов своих действий (самоконтроль своей работы) является важным средством повышения эффективности труда.
Связь восприятия и движения
Любому управляющему действию оператора предшествует восприятие информации. Связь восприятия и движения осуществляется в виде сенсомоторных реакций или сенсомоторной координации.
Сенсомоторной реакцией называется одиночное (дискретное) движение оператора на появление (прекращение действия) того или иного раздражителя. Изучение сенсомоторных реакций имеет большое значение для инженерной психологии. Это обусловлено следующими причинами. Во-первых, многие виды операторской деятельности в той или иной степени представляют собой совокупность различных видов сенсомоторных реакций. Во-вторых, время реакции может использоваться как один из показателей психофизиологического состояния оператора или готовности его к выполнению определенного вида деятельности. В-третьих, время реакции очень часто используется как индикатор при инженерно-психологических измерениях и исследованиях.
Различают следующие типы сенсомоторных реакций:
простая сенсомоторная реакция,
сложная сенсомоторная реакция,
реакция на движущийся объект.
Простая сенсомоторная реакция заключается в ответе заранее известным простым одиночным движением на внезапно появляющийся, но заранее известный сигнал. Основной показатель такой реакции – время, которое складывается из двух составляющих: латентного (скрытого) периода и времени моторного акта.
Обычно в процессе изучения деятельности оператора измеряют общее время реакции, т. е. промежуток времени между моментом t0 появления сигнала и моментом t1 окончания реагирования на него (например, моментом нажатия кнопки). Для практики инженерно-психологических исследований обычно, наибольший интерес представляет сенсорная составляющая (латентный период) времени реакции. Именно эта характеристика имеет большое значение при контроле состояния оператора, профессиональном отборе, проведении инженерно-психологических измерений.
Для получения объективных выводов о результатах работы оператора желательно величину латентного периода получить в «чистом» виде, отбросив влияние всех побочных факторов. Их влияние может вызвать как постоянную, так и переменную погрешность в измерении времени реакции (ВР). Первая оказывает влияние на его математическое ожидание, вторая – на дисперсию (средне-квадратическое отклонение).
В реальных процессах работы оператора простые сенсомоторные реакции встречаются сравнительно редко. Наиболее характерными являются сложные реакции, в которых требуемое действие оператора зависит от вида и характера поступившего сигнала. Например, каждому из сигналов соответствует включение своего тумблера. При анализе сложных реакций необходимо иметь в виду, что движения в той или иной степени осуществляются под контролем зрительной системы. Многие элементы программы двигательного акта формируются еще до начала движения, по отношению к которому зрительная система выступает в роли задающего устройства, Таким образом, сенсорная и моторная компоненты ВР имеют на оси времени общий участок (на рис. 6.5 он обозначен штриховкой). Это означает, что в это время начинают работать несколько параллельных уровней регуляции.
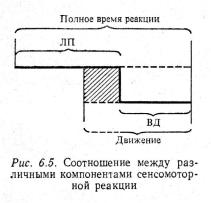
Для деятельности оператора характерно два режима осуществления сложных сенсомоторных реакций. В первом случае перед началом дискретного движения глаз неподвижны (режим зрительной фиксации), а рука находится в покое. Например, оператор должен вести непрерывное наблюдение за некоторым узким участком индикатора и в то же время реагировать на появление сигналов вне этого участка. При этом соотношение между всей площадью индикатора и площадью контролируемого участка может быть довольно большим.
Во втором случае глаза наблюдателя свободно рассматривают некоторое информационное поле, а рука или неподвижна, или занята каким-то побочным движением. Это возникает тогда, когда оператор должен вести наблюдение за несколькими индикаторами одновременно и реагировать только в том случае, если на одном из них произошло критическое изменение некоторого параметра. В отличие от первого случая соотношение между площадями индикатора и контролируемого участка может быть малым. Такой режим работы оператора будет называться свободным.
Проведенные исследования показали, что латентный период ВР при прочих равных условиях значительно меньше при наблюдении в свободном режиме, чем в режиме фиксации. Его величина зависит от эксцентриситета стимула: наблюдается медленное увеличение латентного периода с ростом угла α проекции стимула на сетчатку. Это увеличение более выражено в режиме фиксации, чем в режиме свободного наблюдения (рис. 6.6). За пределами зоны ясного видения (α > 45°) это увеличение проявляется наиболее сильно.
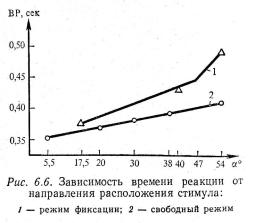
Время движения при прочих равных условиях также существенно меньше в свободном режиме по сравнению с режимом фиксации. Его величина зависит от направления движения: движения вправо и вниз протекают быстрее, чем влево и вверх. Эта зависимость наблюдается в обоих режимах работы. Время движения линейно зависит также от его амплитуды (рис. 6.7). Однако в явном виде эта зависимость проявляется лишь для свободного режима; в режиме фиксации время движения линейно зависит в соответствии с формулой (6.1) от комплексного индекса трудности Tp.
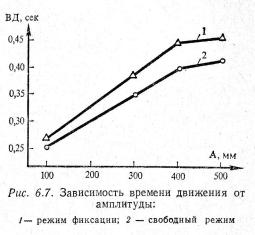
Значительный интерес представляет свидетельствующие об уменьшении обоих составляющих ВР в свободном режиме по сравнению с режимом фиксации. В этом проявляется функциональное единство сенсорных и моторных процессов: в ответ на изменение режима наблюдения появляются качественные и количественные изменения в моторной деятельности. Это как раз и свидетельствует об участии параллельно действующих каналов, имеющих общие временные участки.
Общее время реакции зависит также от сложности выбора нужного сигнала на информационном поле. В качестве меры сложности может быть принято количество поступающей к оператору информации. Общее время реакции увеличивается в этом случае за счет латентного периода, время моторного компонента мало зависит от энтропии сигналов (рис. 6.8).

Количество ошибочных реакций практически не зависит от режима работы. Между количеством ошибок, сделанных на движениях «вправо» и «влево», имеется статистически значимое различие: «вправо» ошибок больше. Здесь, по-видимому, проявляется известная связь между скоростью и точностью (движения «вправо» быстрее). В обоих режимах работы по всем направлениям наблюдается рост ошибок с ростом амплитуды движения.
Наиболее распространенным видом сенсомоторной координации являются операции слежения. Задача оператора в этом случае заключается в том, чтобы посредством воздействий на органы управления удерживать движущийся объект на заданной траектории или совмещать с другим движущимся объектом. В отличие от реакций, которые носят дискретный характер, операции слежения представляют собой по видимости непрерывный процесс.
Различают два основных вида операций слежения. В случае, когда оператор воспринимает весь ход изменений входного и выходного сигналов и сводит к нулю разностную ошибку, операция называется слежением с преследованием. Если же оператор воспринимает только разность между входным и выходным сигналами и стремится свести ее к нулю, слежение называется компенсирующим.
Основными характеристиками процесса слежения являются: время инерции, время нахождения метки на цели, первоначальное рассогласование и время слежения.
Лучшими оказываются характеристики процесса слежения с преследованием. Установлено, что время инерции колеблется в пределах 0,65–1,25 сек, причем наибольшим оно оказывается для малых скоростей движения цели (менее 8 мм/сек). Время нахождения метки на цели составляет 5–7% всего времени слежения. По мере тренировок это время может быть доведено до 20 и более процентов. Средняя ошибка слежения колеблется в пределах 0,15–0,20 сек при скорости движения цели в поле зрения 2 мм/сек и 0,05–0,15 сек при скорости 10 мм/сек. Наибольший удельный вес в процессе слежения составляют операции опережения (40–50%), Характер изменения относительного времени, в течение которого имеют место движения опережения и запаздывания, паузы и совпадения, показан на рис. 6.9. Колебательный процесс слежения характеризуется частотой 1,5–5 Гц.
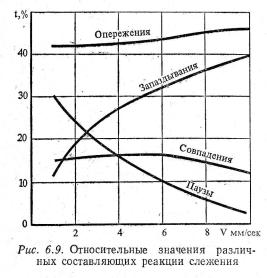
Использование речевых сигналов для управления машиной
Помимо двигательных актов для управления машиной возможно использование и речевых сигналов, подаваемых оператором. Машиной может служить ЭВМ, система управления, исполнительный механизм или другое техническое устройство, способное воспринимать и использовать речевую информацию.
Речевой ввод информации в машину имеет целый ряд преимуществ по сравнению с механическим.
Речевой ввод информации в ЭВМ рассчитан на использование органов речеобразования человека, поэтому он высвобождает глаза и руки, предоставляет человеку свободу перемещения в процессе управления.
В ряде случаев речевой ввод надежнее и быстрее других способов ввода информации, например, связанных с нажатием кнопок и клавишей. Проиллюстрируем это таким примером. Пульт управления содержит 100 кнопок, нажатие каждой из которых означает передачу соответствующей команды. Следовательно, для передачи команды оператор должен отыскать требуемую кнопку и нажать ее. На поиск необходимой кнопки требуется определенное время; кроме того, возможно ошибочное нажатие другой кнопки. При речевом вводе, приняв необходимое решение, оператор голосом отдает необходимую команду. При наличии визуальной обратной связи это быстрее, чем отыскать и нажать нужную кнопку, и автоматически исключается ошибочное нажатие. Исследования показывают, что речевой ввод осуществляется быстрее ручного в 2–3 раза.
При речевом вводе можно работать в темноте, не требуется обязательное присутствие оператора у пульта управления. При употреблении радиомикрофона возможна полная свобода перемещения оператора. При речевом управлении утомление наступает гораздо позже, чем при ручном.
Затрудняющими факторами при речевом управлении машиной являются различные акустические шумы и помехи, в том числе шумы в помещении, разговоры других операторов, акустические сигналы механизмов и т. п.
В настоящее время работы по созданию устройств речевого ввода информации не вышли пока еще за рамки лабораторных исследований, однако есть все основания полагать, что в самое ближайшее время появятся первые образцы распознавателей речевых команд.
Создание автоматических распознавателей речи основано на построении моделей восприятия устной речи человеком. Построение таких моделей опирается на следующие положения:
наиболее эффективным методом опознания устной речи является параллельный анализ временных и спектральных (частотных) характеристик речевых сигналов;
в основе алгоритма опознания речевых сигналов лежит пре образование звуковых колебаний в текущий спектр;
каждая реализация текущего спектра звукового сигнала может быть представлена в виде детерминированного N-мерного вектора;
в памяти модели фиксируются эталоны в виде N-мерных векторов, которые обозначают определенный тип данного класса звуковых сигналов;
в процессе опознания распознаваемый звуковой сигнал отождествляется с тем или иным эталоном в соответствии с принятыми правилами.
Рассмотрим подробнее, как реализуются эти положения при создании распознавателей речи. На основании исследований в области физиологии и психологии речи можно выделить два основных этапа обработки речевой информации. Этап первичной обработки связан с ее анализом и выделением наиболее характерных признаков, этап вторичной обработки – с опознанием речевых сигналов на основании результатов сравнения выделенных признаков с признаками эталонов.
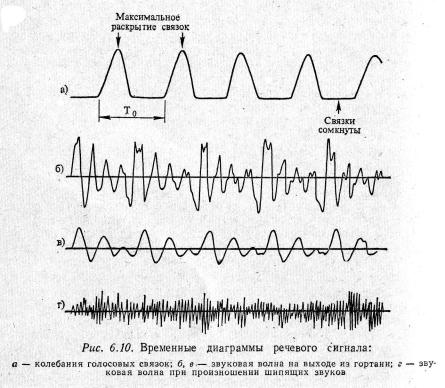
Для более глубокого понимания сущности этих этапов необходимо ознакомиться с процессом речеобразования. При произношении звуков речи могут участвовать три источника: голосовой, шумовой и импульсный. Голосовой источник принимает участие в произношении звонких звуков. В этом случае под действием давления со стороны легких голосовые связки совершают движения почти периодического характера. В исходном состоянии они сомкнуты, под действием легочного давления они раскрываются (рис. 6.10,a). Промежуток времени между двумя очередными моментами начала раскрытия связок называется периодом Т0 основного тона речи. Величина, обратная Т0, есть частота основного тона речи. У мужчин она составляет 80–100 Гц, у женщин – 160–320 Гц.
Звуковая волна, создаваемая голосовыми связками, проходит через речевой тракт и претерпевает существенные изменения, принимая на выходе изо рта говорящего форму, изображенную на рис. 6.10, б. Речевой тракт составляют полости гортани, рта и носа, он представляет собой акустическую трубу с неодинаковой по продольной оси площадью поперечного сечения. Изменив продольный профиль трубы (это достигается изменением положения языка, губ и челюстей), можно получить другую звуковую волну на ее выходе (рис. 6.10, в).
При произношении щелевых звуков («с», «ш» и др.) участвует шумовой источник. Он образуется в месте сужения речевого тракта: под действием легочного давления воздух в месте сужения проходит с большой скоростью, образуя завихрения (рис. 6.10, г). Глухие звуки («п», «т» и др.) возникают при внезапном спаде избыточного давления после перекрытия речевого тракта (импульсный источник возбуждения).
В процессе артикуляции происходит переход от одного источника к другому, замена одного профиля трубы другим. Зная динамику их изменения во времени, можно полностью охарактеризовать (распознать) данный речевой сигнал. Для этого пользуются так называемыми спектрограммами речи G(f,t), представляющими собой зависимость интенсивности G речевого сигнала от частоты колебаний и времени t. Графическое изображение зависимости G(f,t) носит название видеоспектрограммы речевого сигнала (рис. 6.11).
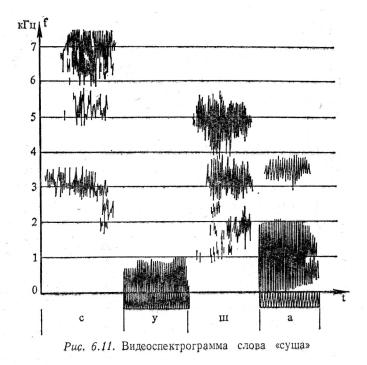
В текущем спектре G(f,t) для каждого момента времени t содержатся сведения о типе источника возбуждения речевого тракта и о профиле акустической трубы. Эти данные определяются распределением энергии G по оси частот f для момента времени t. Вся же спектрограмма характеризует динамику речевого тракта и источников возбуждения отдельных звуков. По этой причине текущий спектр и используется при автоматическом распознавании речи.
На практике пользуются не непрерывным сигналом G(f,t), а его дискретными значениями через каждые 5–15 м/сек. Тогда текущий спектр представляется упорядоченной во времени последовательностью отсчетов (N-мерным вектором):
G(f, t1), G(f,t2), ..., G(f, tN),
где N носит название длины речевого сигнала.
Спектрограммы G(f,t) даже для одного и того же речевого сигнала (звука, слова, фразы) чрезвычайно изменчивы. Их вид зависит от состояния и индивидуальных особенностей диктора, громкости и темпа произношения речи, расстояния говорящего от микрофона и т. п. Вместе с тем за изменчивостью спектрограмм можно проследить и устойчивые признаки, проявляющиеся во всех спектрограммах одного и того же речевого сигнала. Поэтому при распознавании речи для каждого речевого сигнала определяется некоторая эталонная спектрограмма и правила преобразования всех остальных спектрограмм данного речевого сигнала в эталонную. Это преобразование осуществляется путем нелинейного расширения-сжатия полученной спектрограммы по оси времени и интенсивности.
Важнейшим понятием при распознавании сигналов является класс. Под ним понимается условное обозначение множества сигналов, передающих один и тот же смысл сообщения или выполняющих определенную постоянную функцию при передаче смысла.
В общем случае при распознавании слитной речи (фраз) классами сигналов являются фонемы. Под ними понимаются элементарные звуки речи, которым при написании соответствует одна и та же буква или символ. При распознавании в полученном сигнале определяются все фонемы, и по их последовательности складывается вся фраза. Такая задача возникает при организации устного диалога между человеком и ЭВМ.
При управлении машинами достаточно обычно ограниченного числа (в пределах нескольких десятков) команд. В этом случае классами распознаваемых сигналов могут служить отдельные слова из заранее выбранного словаря. Каждый класс (слово) сопоставляется с условным кодом, порядковым номером или наименованием команды. Задача распознавания заключается в определении этого кода или номера слова в словаре.
При распознавании слов устной речи используются два подхода – модельный и логический.
При модельном подходе строят математические модели всех возможных сигналов каждого слова, например его текущих спектров. Построить модель – это значит указать некоторый способ получения этих сигналов. Для каждого слова выбранного словаря должна быть задана исходная спектрограмма, а также правила генерирования всевозможных производных спектрограмм из этой исходной. Эти правила позволяют получить сигналы слова с различным темпом и интенсивностью произношения. Если математические модели сигналов всех слов заданы, то распознаваемый сигнал сравнивается с сигналами (спектрограммами) G(f,t), генерируемыми моделью. Этот сигнал относится к тому слову, спектрограмма которого (эталонная или одна из производных) наиболее близко совпадает со спектрограммой произнесенного слова. Для сокращения времени, затрачиваемого на распознавание, его производят целенаправленным образом, используя методы динамического программирования.
При логическом подходе к распознаванию для каждого слова определяются наиболее характерные признаки, принимающие одинаковое значение на всех возможных сигналах одного слова или группы слов. Примерами таких признаков являются: наличие или отсутствие шипящего звука в слове, наличие одного, двух и более гласных звуков, длина слова, местоположение ударного слога, наличие смычки внутри слова и др.
Распознавание неизвестного слова заключается в вычислении для него значений признаков и в проверке логических условий, которым должны удовлетворять значения признаков для каждого слова. Проверку логических условий удобно организовать в виде логической пирамиды или дерева. За кажущейся простотой логических методов скрываются огромные трудности, связанные с выделением устойчивых характерных признаков. Поэтому наибольшие успехи достигнуты при использовании модельных методов распознавания устной речи.
При распознавании речи возникают задачи обучения распознаванию. Обучение заключается в определении типичного (эталонного) сигнала каждого слова на основании многократного произношения всех слов выбранного словаря. Обучение обычно предшествует собственно распознаванию. Оно будет наиболее эффективным в том случае, если будет осуществляться для каждого диктора в отдельности, т. е. если будет производиться индивидуальная подстройка распознавателя речи под диктора.
Распознаватели речи могут выполняться как на базе специализированных устройств, так и на основе универсальных ЭВМ. Одно из таких устройств разработано в Институте кибернетики АН УССР (рис. 6.12). Это устройство выполнено на базе ЭВМ БЭСМ-6 и предназначено для распознавания отдельно произносимых слов. Устройство обучаемо, что позволяет изменять словарь и подстраиваться под диктора. Словарь состоит более чем из 200 слов.
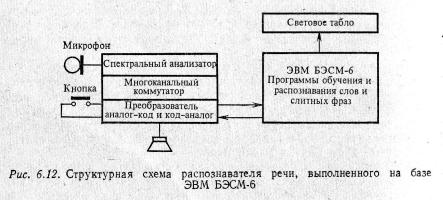
Работает устройство ввода речевых сигналов следующим образом. Если диктор (оператор) хочет, чтобы ЭВМ распознала устную команду, он нажимает кнопку и произносит нужное слово. Электрический сигнал микрофона подвергается спектральному анализу. Анализатор речи вычисляет текущий спектр речевого сигнала и через коммутатор и преобразователь аналог-код передает в ЭВМ те спектральные элементы, которые вырабатываются анализатором при нажатой кнопке. Так в памяти ЭВМ оказывается текущий спектр слова (команды).
Этот спектр сравнивается с эталонами всех спектрограмм выбранного словаря. Эталоны для каждого слова состоят из исходной спектрограммы и производных от нее, получаемых из исходных путем нелинейного растяжения по осям времени и интенсивности.
В результате сравнения, которое осуществляется методом динамического программирования, распознаваемый сигнал отождествляется с одним из слов выбранного словаря. Результат распознавания высвечивается на световом табло. Это позволяет оператору убедиться в правильности ввода команды. Если несколько слов претендуют на ответ распознавания, вырабатывается отказ от распознавания и выдается звуковой сигнал, означающий, что ранее произнесенное слово следует повторить.
Подстройка под диктора позволяет достичь высокой достоверности распознавания – для словаря из 200 слов 0,5% ошибок и 2,5% отказов от распознавания.
Осуществление автоматического распознавания речи аналогично тому, как это могут делать ухо и мозг человека, станет возможным только на основе детального изучения фонетических, грамматических, контекстуальных и семантических закономерностей человеческой речи и процесса ее восприятия (а также понимания) человеком. Важным условием решения этой задачи является исследование процесса овладения речью.
В то же время очевидно, что для заданной точности распознавания может быть найдено компромиссное решение: компромисс между сложностью лингвистических взаимосвязей, объемом словаря и числом дикторов.
Деятельность оператора в системе «человек-машина»
Психологический анализ деятельности
В предыдущих главах рассмотрены процессы информации, ее анализа, хранения и переработки, принятия решения и осуществления управляющих воздействий. Все эти процессы протекают не изолированно. Они включены в единую деятельность, выполняемую оператором. Чтобы понять соотношение между этими процессами, нужно произвести анализ операторской деятельности в целом, рассмотреть ее структуру и механизмы регуляции.
При всем своем своеобразии деятельность любого отдельного человека (индивида) включена в систему общественных отношений. Вне этих отношений она вообще не существует. Как именно она существует – это определяется характером общественных (прежде всего производственных) отношений, которые порождаются развитием производства и не могут реализоваться иначе, как в деятельности конкретных людей.
Как особый вид деятельности операторская деятельность сформировалась в связи с достижениями научно-технического прогресса, с развитием сложной техники (систем управления, систем дистанционной связи и т. п.)
Развитие техники приводит к тому, что человек постепенно освобождается от энергетических, транспортных и технологических функций; его основными функциями становятся программирование работы машин, управление ими и контроль за их работой. В современном автоматизированном производстве человек переходит от непосредственного участия в технологическом процессе к выполнению подготовительных и контрольных функций.
Такое изменение характера труда, естественно, выдвигает новые требования к человеку: к его профессиональным знаниям и навыкам, общей культуре, к его психологическим качествам; формируется специфический вид трудовой деятельности.
Техника используется как средство расширения возможностей человека. Освобождая человека от необходимости выполнять рутинную механическую работу, она открывает новые перспективы развития творчества.
Отношение «человек–техника» было и остается отношением «субъект труда – орудие труда». Любая машина (в том числе и электронная вычислительная машина) – это орудие труда, пользуясь которым человек достигает сознательно поставленной цели. Поэтому при изучении автоматизированных систем управления (систем «человек – машина») центральным является вопрос об особенностях деятельности человека. Технические звенья системы должны рассматриваться относительно этой деятельности как ее орудия.
Операторская деятельность представляет собой специфический вид трудовой деятельности человека, возникший на определенной ступени развития техники и производства в целом. Поэтому прежде чем переходить к психологическому анализу операторской деятельности, кратко рассмотрим трудовую деятельность человека вообще
Трудовая деятельность человека, как и любая другая, исходит из определенных мотивов к направлена на достижение определенных целей. В общем смысле мотив – это то, что побуждает человека к деятельности, а цель – то, чего он стремится достигнуть в результате деятельности.
Когда речь идет о мотивах, имеются в виду некоторые субъективно переживаемые побуждения к деятельности. Для субъекта мотив выступает как непосредственная побудительная сила, как непосредственная причина деятельности. При этом источник мотива нередко усматривают в мышлении, в сознании.
Но действительной основой мотива человека являются потребности, т. е. объективная необходимость – его нужда в веществе, энергии и информации. Принято различать потребности материальные (в пище, одежде, жилище) и духовные, или культурные (в общении с людьми, образовании, чтении и т. д.). Эти потребности так или иначе отражаются в сознании. Мотив и есть осознанная, т. е. отраженная в сознании, потребность. Человеческие потребности, а следовательно и мотивы, развиваются в процессе исторического развития общества.
Цель деятельности – это идеальный, или мысленно представляемый, ее результат. Отношение «мотив – цель» образует своего рода «вектор», направляющий деятельность человека. Этот «вектор» существенно влияет на протекание психических процессов (перцептивных, мнемических, интеллектуальных), включенных в деятельность, на психические состояния и динамику работоспособности человека. В течение жизни у каждого человека формируется определенная система мотивов, одни из которых становятся доминирующими, другие – подчиненными. Определенную систему образуют также и цели, которые человек перед собой ставит.
Нужно отметить, что идеальная подготовка к той или иной трудовой деятельности и образование целей с развитием производства становятся все более сложными. Формирование представления о результате труда у современного человека предполагает овладение системой знаний о технике, технологии, о производстве в целом. Конечной целью любой трудовой деятельности является получение некоторого полезного (и для данного человека, и для общества) результата. Но достигается эта цель поэтапно, путем решения частных задач. Так, цель деятельности диспетчера аэропорта состоит в том, чтобы обеспечить безопасный взлет, пролет и посадку в районе данного аэропорта. Выполняя эту деятельность, он решает такие задачи, как установление связи с бортом самолета, оценка воздушной обстановки, получение информации о погоде и т. д. Каждая такая задача состоит из более мелких: просмотр расписания, наблюдение за экраном радиолокатора, запросы и т. д.
Элемент деятельности, направленный на выполнение простой текущей задачи, в психологии принято называть действием. Более детальный анализ позволяет разложить действие на составляющие его рабочие движения (в случае, когда речь идет о моторных действиях). При таком рассмотрении действие выступает как система определенным образом организованных движений (рук, ног, всего тела). Фактором, организующим движения в систему (в действие), является задача.
В принципе деятельность человека может быть описана как система последовательно выполняемых действий. Иногда некоторые действия выполняются параллельно, т. е. одновременно. Нужно отметить, однако, что деятельность не есть простая сумма элементарных действий. Описание деятельности как аддитивного процесса дает лишь весьма приблизительное представление о ее структуре. В действительности соотношение действий в структуре деятельности более сложно. В процессе ее выполнения происходит объединение и расчленение действий, переходы одного в другое, преобразование действий и т. п. Действие характеризуется высокой динамичностью и пластичностью. Каждое из них формируется по ходу деятельности. Одно и то же действие человек может выполнять разными способами. Способ выполнения каждого последующего действия зависит от результатов предшествующего и конкретных условий деятельности. В процессе деятельности так или иначе проявляются творческие способности человека.
Деятельность выступает как сложная, иерархически построенная, многоуровневая и динамически развивающаяся структура с большими возможностями переключений от уровня к уровню.
Все это создает трудности для использования методов ее формального описания. Пожалуй, только стереотипная, доведенная до автоматизма («задолбленная») деятельность может быть описана как сумма последовательно выполняемых действий. Но в этом случае целесообразно заменить человека автоматическим устройством.
Следует отличать действие как элемент человеческой деятельности от операции, являющейся элементом технологического процесса. Иногда операция может выполняться человеком при помощи одного действия, иногда ее выполнение требует нескольких действий. В автоматизированном производстве многие операции выполняются машинами, т. е. без участия человека. В этой связи возникает важный вопрос о согласовании хода технологического процесса с деятельностью человека, об учете особенностей человеческой деятельности при организации технологического процесса и режима труда.
В каждый момент выполнения действие характеризуется высокой степенью соответствия (адекватностью) предмету, орудиям и условиям труда. Это возможно только потому, что предмет, орудия и условия труда отражаются в сознании человека, а возникающее отражение (субъективное отражение) выступает в роли регулятора выполняемого действия.
Иначе говоря, информация о текущем состоянии предмета, на который направлено действие, а также о внешних условиях выступает в форме его субъективного образа. Существенной его характеристикой является оперативность. «Оперативный» – значит приспособленный для правильного и быстрого практического выполнения тех или иных задач.
Идеальное специализированное отражение преобразуемого в действии объекта (предмета, процесса, явлений), складывающееся по ходу выполнения конкретного действия и подчиненное задаче этого действия, называется оперативным образом. Оперативный образ и выступает в роли основного регулятора действия, обеспечивая его адекватность предмету, орудиям и условиям труда. Именно благодаря оперативному образу отдельное движения органов человеческого тела организуются в единую систему – действие. Оперативный образ формируется в ходе процессов приема и переработки информации и вместе с тем является фактором, направляющим их течение и организацию.
Важная роль в регуляции действий принадлежит сигналам обратной связи, несущим информацию о результате выполненного действия. Эти сигналы включаются в оперативный образ, корректируют его.
Итак, механизм регуляции действия представляет собой замкнутую систему (рефлекторное кольцо), включающую процессы приема и переработки информации, принятия решения и сигналы обратной связи, возникающие при выполнении действия.
Все, что говорилось выше, относится прежде всего к так называемым внешним действиям: действиям, посредством которых человек преобразует вещественные предметы (перемещает их в пространстве, разделяет на части и соединяет и т. д.) и которые доступны непосредственному наблюдению. Но любая трудовая деятельность человека включает и внутренние, умственные действия (действия, выполняемые в уме). Как показывают исследования, эти внутренние действия формируются на основе внешних в результате интериоризации (что в переводе с латинского значит «превращение во внутреннее»). При этом структура внешнего действия подвергается специфической трансформации. Внутреннее действие является свернутым и обобщенным. Решающая роль в процессе интериоризации принадлежит слову, в котором фиксируются существенные свойства предметов (и явлений) объективной действительности, а также способы оперирования как самими предметами, так и информацией о них. Существенным условием интериоризации является общение человека с другими людьми.
Оперирование словами и другими знаковыми системами дает возможность человеку решать определенный класс задач в идеальном плане (без обращения к материальным предметам и оперирования с ними). Именно во внутреннем плане формируются программы деятельности человека.
В трудовой деятельности человека имеет место не только интериоризация действий, но и их экстреоризация (от слова «экстериус» – внешний), т. е. превращение внутренних действий во внешние.
Таким образом, механизм психической регуляции деятельности человека имеет сложное строение. Он включает несколько уровней:
уровень ощущений и восприятия;
уровень представлений;
уровень речемыслительных процессов.
Первый уровень относится к отдельным действиям. Он обеспечивает в основном регуляцию внешних действий, соответствие данного конкретного действия данным конкретным условиям, предмету и орудию труда.
Второй уровень относится также и к внутренним действиям; обобщенность и панорамность представления (вторичного образа) создает возможность варьирования приемов выполнения действий и их переноса из одних условий в другие.
Третий уровень относится главным образом к внутренним действиям (к умственному плану деятельности). Благодаря тому в речемыслительных процессах отражаются общие и существ связи между явлениями (их закономерности), этот уровень обеспечивает возможность предвидения хода событий и планирования деятельности в целом.
В реальной трудовой деятельности перечисленные уровни ее регуляции выступают в неразрывном единстве.
Однако в зависимости от конкретных задач тот или иной уровень становится ведущим. Так, при выполнении задачи слежения за движущимся объектом ведущим является первый из перечисленных уровней. При поиске неисправностей в аппаратуре ведущую роль берет на себя второй и третий уровни.
Соотношение между этими уровнями изменяется в процессе обучения и тренировки, при формировании навыков.
Нейрофизиологической основой деятельности является функциональная система (рис. 7.2). Ее теория разработана академиком П. К. Анохиным.
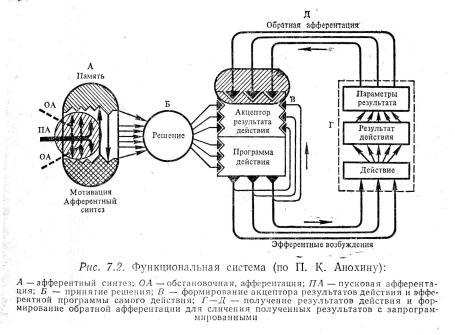
Рис. 7.2. Функциональная система (по П. К. Анохину):
А – афферентный синтез: ОА – обстановочная, афферентация; ПА –пусковая афферентация; Б – принятие решения; В – формирование акцептора результатов действия и эфферентной программы самого действия; Г–Д – получение результатов действия и формирование обратной афферентации для сличения полученных результатов с запрограммированными
Принципиально структура операторской деятельности такова же, как и любой другой трудовой деятельности. Однако она обладает некоторыми специфическими особенностями, определяемыми тем, что оператор не имеет возможности взаимодействовать с предметом своего труда (объектом управления) непосредственно: информация об объекте управления передается ему через систему технических устройств, его воздействие на объект также передается через систему технических устройств. Оператор воспринимает не самый объект, а его информационную модель, манипулирует же он с органами управления.
Элементарная схема деятельности оператора может быть описана следующим образом.
Есть некоторый объект управления. Цель деятельности человека-оператора состоит в том, чтобы перевести этот объект из одного состояния в другое (из состояния а' в состояние а») или, напротив, удержать объект в некотором состоянии (состоянии а'), преодолевая внешние возмущения. На основе имеющейся в его распоряжении информации (в том числе и накопленной в профессиональном опыте) в голове человека-оператора формируется некоторый образ задаваемого (будущего) состояния объекта управления, т. е. образ того состояния, которое должно быть достигнуто в результате деятельности. Назовем его образ-цель. Воспринимая сигналы, поступающие от средств отображения информации, человек-оператор оценивает текущее состояние объекта управления, сличает ее с образом-целью, анализирует возможные способы достижения цели, принимает решение и выполняет управляющее действие (или систему действий). Сигналы, возникающие в результате этого действия, передаются через технические устройства к объекту управления, изменяя его состояние. Сигналы об изменившемся состоянии поступают к оператору. Он оценивает, достигнута ли цель (или решена ли задача, если речь идет об отдельном действии), и в зависимости от результата оценки либо прекращает деятельность, либо выполняет новое управляющее действие: в последнем случае цикл управления повторяется.
Человека-оператора принято рассматривать как звено системы «человек – машина». Но это звено особого рода, организующее всю систему и направляющее ее на достижение определенного, заранее заданного результата. Именно на долю человека приходится постановка цели и определение частных задач, решение которых обеспечивается ее достижением, выполнением управляющих действий и оценкой достигаемых благодаря им результатов. Технические устройства – это средства, которыми человек пользуется при выполнении действий и которые несут ему информацию о результатах этих действий.
Формирование в сознании оператора образа-цели в системах «человек – машина» опосредствуется техническими устройствами. Образ строится с учетом этих средств. Вместе с тем он определяет критерии селекции информации о текущем состоянии объекта, а также ее интеграции. Формирование образа-цели связано с прогнозированием (предвидением) изменений объекта управления. Как показывают исследования, прогнозирование является неотъемлемым компонентом любой целенаправленной деятельности. Если средства отображения информации затрудняют прогнозирование событий (что иногда бывает), то это приводит к нарушению деятельности: к ошибкам, сбоям, запаздыванию в выполнении действий.
Особенность оперативного образа, формирующегося в процессе приема информации о текущем состоянии объекта управления, состоит в том, что он имеет два уровня. Первый – это восприятие тех физических явлений, которые выступают в роли носителей информации (положение стрелки на шкале контрольно-измерительного прибора, комбинаций световых пятен на экране электроннолучевой трубки и т. п.). Второй – трансформация образа, отражающего показания приборов, в представление о состоянии управляемого объекта.
Задача, стоящая перед оператором (перевести объект управления из состояния а' в состояние а»), выступает субъективно, т. е. для него, как «рассогласование» образа-цели и оперативного образа. Это «рассогласование» определяет направление поиска решения, в процессе которого происходит выдвижение гипотез, их оценка и принятие решения. Обычно этот процесс протекает в плане внутренних действий, но иногда (у неопытных операторов) в поиск решения включаются и внешние действия.
Принятие решения неразрывно связано с формированием плана, или программы, деятельности. Однако такая программа обычно не представляет собой жесткой однозначной системы предписаний, а выступает в обобщенной форме; в зависимости от конкретных условий пути ее «развертки» могут быть различны. Она представляет скорее систему подзадач, чем детальный перечень всех элементов действия (входящих в него движений).
Программа, так же как и все другие компоненты механизма, регулирующего операторскую деятельность, строится с учетом тех технических устройств, при помощи которых она реализуется.
Как отмечалось, выполнив то или иное управляющее действие, оператор изменяет состояние управляемого объекта. Возникающий при этом и передаваемый через систему технических устройств сигнал является не просто сигналом о новом состоянии объекта управления, но вместе с тем и сигналом о результате выполненного оператором действия (обратная связь). Он несет информацию о том, достигнута ли цель (решена ли задача). Образ этого сигнала сличается с образом-целью.
Итак, основными «психологическими составляющими» операторской деятельности является образ-цель, оперативный образ; прогнозирование хода событий, принятие решения, программа (план) действий, восприятие информации об их результатах (обратная связь).
При разработке систем «человек – машина» и ее технических звеньев важно учитывать не только характеристики отдельных анализаторов, перцептивных, мнемических и интеллектуальных процессов, но и структуру операторской деятельности в целом. Системы отображения информации и органы управления должны конструироваться с учетом основных «психологических составляющих» операторской деятельности. Структура операторской деятельности должна учитываться также при определении роли и места человека в системе «человек – машина», выявлении факторов, влияющих на ее эффективность и надежность, распределении функций между оператором и машиной, обучении и тренировке операторов.
Факторы, влияющие на операторскую деятельность
Особенности труда операторов определяются следующими тенденциями развития производства:
С развитием техники увеличивается число объектов (и их параметров), которыми необходимо управлять. Это усложняет и повышает роль операций по планированию и организации труда, по контролю и управлению производственными процессами.
Развиваются системы дистанционного управления. Человек все более удаляется от управляемых объектов, о динамике их состояния он судит не по данным непосредственного наблюдения, а на основании восприятия сигналов от устройств отображения информации, имитирующих реальные производственные объекты. Осуществляя дистанционное управление, человек получает необходимую информацию в закодированном виде (т. е. в виде показаний счетчиков, индикаторов, измерительных приборов и т. д.), что обусловливает необходимость декодирования и мысленного сопоставления полученной информации с состоянием реального управляемого объекта.
Увеличение сложности и скорости течения производственных процессов выдвигает повышенные требования к точности действий операторов, быстроте принятия решений и в осуществлении управленческих функций. В значительной мере возрастает степень ответственности за совершаемые действия, поскольку ошибка оператора при выполнении даже самого простого акта может привести к нарушению работы всей системы «человек – машина», создать аварийную ситуацию с угрозой для жизни работающих людей. Поэтому работа оператора в современных человеко-машинных комплексах характеризуется значительными увеличениями нагрузки на нервно-психическую деятельность человека, в связи с чем по-иному ставится проблема критериев тяжести операторского труда. Основным критерием становится не физическая тяжесть труда, а его нервно-психическая напряженность.
В условиях современного производства изменяются условия работы человека. Для некоторых видов деятельности оператора характерно ограничение двигательной активности, которое не только проявляется в общем уменьшении количества мышечной работы, но и связано с преимущественным использованием малых групп мышц. Иногда оператор должен выполнять работу в условиях изоляции от привычной социальной среды. Деятельность оператора протекает зачастую не в обществе других людей, а в окружении приборов и индикаторов. И если эти устройства спроектированы без учета психофизиологических особенностей оператора либо выдают ему ложную и искаженную информацию, то возникает ситуация, которую образно называют конфликтом человека с приборами.
Повышение степени автоматизации производственных процессов требует от оператора высокой готовности к экстренным действиям. При нормальном протекании процесса основной функцией оператора является контроль и наблюдение за его ходом. При возникновении нарушений оператор должен осуществить резкий переход от монотонной работы в условиях «оперативного покоя» к активным, энергичным действиям по ликвидации возникших отклонений. При этом он должен в течение короткого промежутка времени переработать большое количество информации, принять и осуществить правильное решение. Это приводит к возникновению сенсорных, эмоциональных и интеллектуальных перегрузок.
Рассмотренные особенности операторского труда позволяют выделить его в специфический вид профессиональной деятельности, в связи с чем для его изучения, анализа и оценки недостаточно классических методов, разработанных психологией и физиологией труда и используемых для оптимизации различных видов работ, не связанных с дистанционным управлением по приборам.
При изучении операторской деятельности особое внимание уделяется выявлению и классификации факторов, влияющих на ее эффективность.
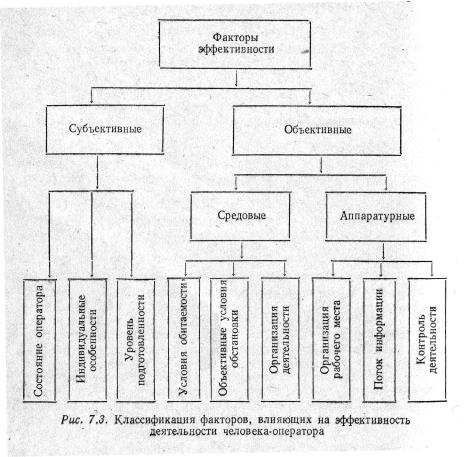
Одна из возможных классификаций факторов приведена на рис. 7.3. Все факторы делятся на две большие группы: субъективные (т. е. зависящие от оператора) и объективные (не зависящие от него). К числу субъективных факторов относятся: состояние оператора, его индивидуальные особенности (медицинские показатели, психофизиологические свойства, морально-психологические качества) и уровень подготовленности к данному виду деятельности. Особенности влияния субъективных факторов должны учитываться при организации трудовой деятельности операторов.
Объективные факторы, в свою очередь, делятся на две основные группы: аппаратурные (определяемые особенностями функционирования техники) и средовые (зависящие от особенностей той среды, в которой приходится работать оператору). Аппаратурные факторы занимают особое место в предлагаемой классификации, поскольку при правильном их учете уже на стадии проектирования системы «человек – машина» могут быть обеспечены условия достижения заданной эффективности деятельности оператора. Для этого, например, рабочее место оператора должно быть организовано с учетом его анатомических, физиологических и психологических возможностей; поток поступающей информации должен соответствовать способности человека по ее приему и переработке; при необходимости повышения надежности работы оператора должно быть предусмотрено наличие средств контроля за его состоянием, результатами деятельности и т. д.
К числу средовых факторов относятся условия внешней среды (обитаемости), объективные условия обстановки и организация деятельности оператора. Учет факторов обитаемости, нейтрализации их возможного вредного воздействия должны начинаться уже при проектировании системы «человек – машина» и продолжаться в ходе ее эксплуатации. При невозможности обеспечения нормальных для жизнедеятельности оператора условий следует предусмотреть систему профилактических мероприятий по защите человека от вредного воздействия нежелательных факторов внешней среды.
Организационные факторы, к числу которых относятся режимы работы и отдыха операторов, организация групповой деятельности, количество рабочих смен, возможности взаимозаменяемости операторов и т. д., выделены в отдельную группу, потому что их наиболее полный и всесторонний учет чаще всего осуществляется в процессе эксплуатации СЧМ. При рациональной организации деятельности, операторов факторы этой группы не должны являться причиной, снижающей эффективность функционирования систем.
Объективные условия обстановки, наоборот, не всегда зависят от деятельности организаторов производства. К их числу относятся, например, такие факторы, как степень ответственности оператора за совершаемые действия, работа в необычных условиях, в ночное время и т. п. Влияние этих факторов может существенно влиять на эффективность работы оператора. Основные методы нейтрализации их вредного действия заключаются в специальной подготовке операторов к работе в необычных условиях.
Учет факторов, которые могут явиться причиной снижения эффективности деятельности оператора, имеет особую актуальность, поскольку позволяет как на стадии проектирования, так и эксплуатации систем «человек – машина» предусмотреть систему мероприятий по оптимизации операторской деятельности.
Виды деятельности оператора
Несмотря на то что деятельность оператора в любой системе «человек – машина» имеет ряд общих свойств, существуют и различные ее разновидности, каждая из которых имеет свои специфические черты. Специфика деятельности оператора зависит от назначения СЧМ, характера их использования, степени участия и количества операторов в системе. Поэтому, прежде чем приступить к классификации видов операторской деятельности, представляется целесообразным привести классификацию систем «человек – машина».
Классификация СЧМ проводится по нескольким признакам. В зависимости от характера протекания процесса управления системы «человек – машина» подразделяются на детерминированные, недетерминированные и игровые. Детерминированные системы функционируют по заранее заданному алгоритму, деятельность оператора здесь подчинена жестким предписаниям. Иными словами, оператор заранее знает, какие сигналы и в какой последовательности могут появиться на информационной модели, а также знает, какие конкретные действия нужно выполнить в ответ на появление того или иного сигнала. Деятельность оператора протекает в соответствии с жестким технологическим графиком. В таких системах он выполняет, как правило, роль исполнителя или наблюдателя. Часто деятельность оператора в детерминированных системах характеризуется монотонностью.
В недетерминированных системах деятельность оператора также протекает по заранее известным правилам, однако моменты появления сигналов, сами сигналы и их последовательность заранее не известны. В то же время известен характер управляющих действий оператора при поступлении того или иного сигнала.
Деятельность человека в недетерминированных системах более сложна, поскольку сигналы поступают в случайном порядке и не создается условий для выработки динамического стереотипа, т. е. привычной последовательности действий. Человек в ожидании сигнала должен сохранять состояние оперативного покоя, т. е. быть постоянно готовым к срочному действию.
В игровых системах заранее не известны все возможные ситуации, которые могут возникать в процессе управления, либо число таких ситуаций настолько велико, что их заранее невозможно предусмотреть. При появлении той или иной ситуации оператор должен каждый раз отыскивать новый вариант решения. Деятельность оператора в таких системах носит эвристический характер. Это предъявляет особенно высокие требования к интеллектуальным и эмоционально-волевым качествам человека, к его памяти, мышлению, вниманию.
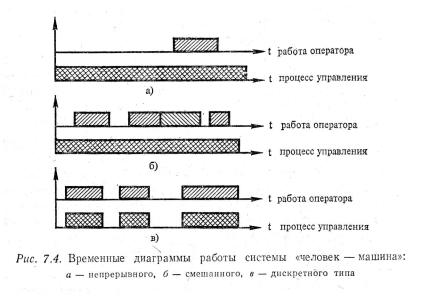
По степени непрерывности участия человека в процессе управления рассмотрим системы трех типов (рис. 7.4). В системах первого типа технологический процесс протекает непрерывно. При нормальном течении процесса оператор только наблюдает за ходом его протекания и не производит активных управляющих воздействий. В случае же отклонения процесса от нормы оператор активно вмешивается в него и в течение определенного промежутка времени должен восстановить нормальное течение процесса (рис. 7.4, а). Такие системы соответствуют высокой степени автоматизации производственных процессов и широко применяются в энергетике, в химической, металлургической промышленности и т. д. Системы такого типа предъявляют высокие требования к готовности оператора к экстренным действиям (бдительности).
Во втором случае процесс управления также носит непрерывный характер, однако деятельность оператора заключается в периодическом решении ряда задач, непрерывно следующих друг за другом (рис. 7.4, б). В промежутках между решениями задач у оператора наступает так называемая оперативная пауза. Такого типа системами являются различного рода системы передачи данных, системы автоматизированной связи, радиолокационные, транспортные системы и т. п.
Для систем третьего типа характерна ярко выраженная дискретность решения отдельных задач. В перерывах между ними оператор находится в состоянии ожидания и подготовки к решению очередной задачи. Примерами таких систем являются системы специального назначения, некоторые системы связи и т. п. В отличие от предыдущего случая в СЧМ дискретного типа работа оператора совпадает по времени с работой технических устройств (рис. 7.4, в).
В зависимости от количества уровней управления целесообразно различать СЧМ первого, второго и т. д. порядка. Структура СЧМ первого порядка включает одного оператора или группу операторов, выполняющих одну функцию, и одно или несколько технических звеньев, СЧМ второго порядка состоит из двух уровней управления. Примером такой системы является управление самолетом в зоне аэропорта. Здесь первый уровень (летчик) осуществляет управление самолетом, а второй уровень (диспетчер аэропорта) руководит действиями всех летчиков, самолеты которых находятся в зоне аэропорта. В системах второго и более высоких порядков особенно остро встает проблема организации групповой деятельности.
Характер деятельности оператора определяется типом СЧМ и способом переработки информации. Способ переработки информации может быть дедуктивным, абдуктивным или индуктивным.
Дедуктивный способ определяется формулой у = F(х), где х – входной сигнал, у – выходной сигнал, F – логическое правило преобразования входного сигнала в выходной. Переработка информации заключается в образовании выходного сигнала по известному входному сигналу и правилам его преобразования.
Абдуктивный способ выражается формулой х = F-1(у). Абдукция имеет место в случае, когда по заданному следствию у и известному решающему правилу необходимо найти причину, входное воздействие. Этот способ переработки информации характерен для операторов радиолокационных станций. По заложенному в опыте оператора руководящему правилу высвечивающая на экране точка (у) опознается либо как сигнал (х), либо как помеха (х’).
Индуктивный способ имеет место в том случае, когда для ряда событий х, у нужно найти руководящие правила, определяющие эти события. Такой способ переработки информации является эвристическим, примером его может служить деятельность диспетчера крупного аэропорта.
В зависимости от преобладания того или иного психического процесса можно выделить следующие виды деятельности: сенсорно-перцептивную, моторную и интеллектуальную.
В сенсорно-перцептивной деятельности «центр тяжести» приходится на получение информации и ее первичную оценку. Основная задача решается в сфере восприятия, логическая обработка информации и принятие решения протекают как бы внутри восприятия, а исполнительские действия предельно упрощены. Такая деятельность характерна для операторов-наблюдателей.
Для моторной деятельности характерным является большой удельный вес исполнительских действий, в то время как восприятие информации и принятие решения подчинены этой главной задаче. Примером такой деятельности может служить деятельность телеграфистов, операторов ввода информации в ЭВМ и т. д.
Деятельность интеллектуального типа характеризуется тем, что на передний план в ней выступают функции принятия решения, логической обработки информации, производства вычислений. Такая деятельность характерна для операторов-вычислителей, диспетчеров и, наконец, в зависимости от соотношения по времени между получением информации и выполнением соответствующего управляющего действия, можно различать деятельность оператора с немедленным обслуживанием и деятельность с отставленным обслуживанием (рис. 7.5).
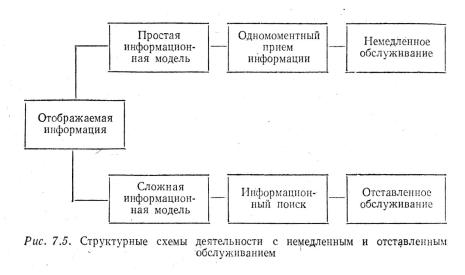
В первом случае имеет место предъявление небольшого числа сравнительно простых сигналов, что обеспечивает симультанное (одномоментное) восприятие информации и немедленное исполнительское действие. Обычно при этом имеется жесткая однозначная связь между сигналами и возможными ответными действиями. В этом случае оператор фактически переходит от приема информации сразу к действию. Этап логической обработки и принятия решения предельно упрощен.
Во втором случае предъявляемая информация имеет сложный характер. Процесс ее восприятия и оценки превращается в действие, развернутое во времени и осуществляемое по определенным, заранее заданным (при алгоритмизированной деятельности) или вырабатываемым (при эвристической деятельности) в процессе работы правилом. Такой достаточно сложный и развернутый процесс приема информации называется информационным поиском. В этом случае обработка информации начинается с некоторой задержкой. Такой тип деятельности оператора называется деятельностью с отставленным обслуживанием.
Таким образом, классификация деятельности оператора должна строиться с учетом системы оснований.
Напряженность работы оператора
Специфической характеристикой оператора, не имеющей своего аналога для машинных звеньев, является напряженность его деятельности. Функциональное напряжение оператора при выполнении производственной задачи может быть отнесено к двум сторонам– энергетической и информационной. Обе они имеют место при всех видах трудовой деятельности, но в зависимости от того, какая сторона преобладает, труд относят к физическому или умственному. Функциональное напряжение организма при физической работе называют тяжестью труда, при умственной – напряженностью труда. Синонимами этих понятий являются физическая тяжесть и нервная напряженность. Операторская деятельность оценивается, как правило, напряженностью труда.
Напряженность в работе оператора, в свою очередь, может быть двух видов – эмоциональной и операционной. Операционная напряженность возникает вследствие сложности выполняемой работы, эмоциональная – в результате действия отрицательных эмоциогенных раздражителей.
Оценка напряженности в работе оператора может производиться с использованием предельно допустимых норм деятельности, под которыми понимаются максимальные значения некоторых параметров. Выход за пределы норм может привести к нежелательным последствиям в работе или состоянии оператора. Предельно допустимые нормы могут быть введены по отношению к следующим показателям:
физиологическим параметрам работающего человека;
параметрам информационной нагрузки оператора.
Оценка напряженности, основанная на измерении динамики изменения физиологических показателей, весьма широко применяется на практике. Пример их номинальных и допустимых значений дается в табл. 7.1.

Эта таблица – лишь пример. В действительности при оценке показателей нужно учитывать индивидуальные особенности людей и их состояние в момент измерения.
Однако, несмотря на широкое применение физиологических показателей для оценки состояния оператора, только по их изменению не всегда можно судить о степени тяжести и напряженности трудовой деятельности. Как физиологический критерий напряжение той или иной системы организма само по себе еще не может дать исчерпывающей информации о функциональном состоянии оператора в процессе работы.
Поэтому весьма плодотворными в этом плане могут оказаться попытки измерения не самой напряженности работы, а внешних факторов условий труда, т. е. измерения степени операционной напряженности. Именно эти факторы при их определенном значении являются причиной тех функциональных изменений в организме, которые характеризуют тяжесть труда. Отсюда возникает стремление дать количественную оценку этим факторам, не исследуя самих реакций организма на их воздействие. Согласно такому подходу, о напряженности работы оператора в СЧМ судят по величине отклонений условий труда от нормальных. Достоинством этого подхода является и тот факт, что с его помощью можно оценить степень напряженности работы оператора уже на стадии проектирования Наибольшее влияние на результаты деятельности оператора оказывает характер поступающего к нему информационного потока. Поэтому большой интерес представляет использование для определения напряженности оператора предельно допустимых норм, характеризующих значения информационной нагрузки оператора. К ним относятся: коэффициент загруженности, период занятости, длина очереди, время пребывания информации на обработке, скорость поступления информации.
Коэффициент загруженности представляет величину

где
 – общее время, в течение которого
оператор не занят обработкой поступающей
информации;
– общее время, в течение которого
оператор не занят обработкой поступающей
информации;
 – общая продолжительность дежурства.
– общая продолжительность дежурства.
Из физиологии труда известно, что при операторской деятельности около 25% рабочего времени должно быть предоставлено человеку для отдыха. Следовательно, η≤0,75.
Однако для операторской деятельности должна быть обеспечена не только допустимая загруженность, но и определенное чередование, периодов работы и отдыха (оперативного покоя). Для учета этого положения вводится понятие периода занятости Тзан, под которым понимается время непрерывной (без пауз) работы. Для деятельности оператора рекомендуется, чтобы это время не превышало 15 мин.
Появление напряженности может быть вызвано и наличием очереди в обработке информации. Такое положение имеет место тогда, когда новая информация поступает до окончания обработки ранее поступившей информации. Причем на появление напряженности оказывает влияние как частота появления, так и длина очереди.
Частота появления очереди оценивается показателем
P-Tf,' (7.16)
где N04 – число сигналов, обработанных в условиях очереди; N – общее число поступивших сигналов.
По своей сущности коэффициент очереди представляет собой вероятность обработки информации в условиях очереди. Экспери ментальные исследования показывают, что его величина не должна превышать 0,4 [см. 109]. <.
На деятельность оператора влияет и длина очереди. Если ее значение К превышает объем оперативной памяти, то возможны случаи пропуска сигналов оператором, возникновения ошибок, что способствует появлению операционной напряженности. Ее среднее значение должно быть несколько меньше и не превышать трех сигналов одновременно.
Время пребывания информации на обработке не должно превышать допустимого значения, определяемого формулой (7.4). В соответствии с выражением (7.2)
^пр = топТ^ож «^ Тпр_ Д0П- (/.1/)
Из этого условия следует
«^ож ~ ^пр ^оп ^ ТПр_ доп Топ. (/.10)
На деятельность оператора большое влияние оказывает скорость поступления информации.' Эта скорость не должна превышать пропускной способности оператора. Пропускная способность оператора существенно зависит от организации его работы. Обычно пропускная способность не превышает 30 дв. ед./сек. Реально же она лежит в пределах 1 -г- 5 дв. ед./сек.
На основании сказанного предельно допустимые нормы деятельности определяются следующими значениями:
Идол = «>' «i Рдоп==^>^:> ~ож. доп ~ Ъпр. доп Т ~оп>
. Тзан = 15 мин; Яд0П = 3; V = 1 -f- 5 дв. ед./сек.
Фактические характеристики деятельности оператора не должны превышать соответствующих предельно допустимых норм. Превышение их свидетельствует о появлении напряженности в работе оператора.
Функциональное состояние оператора
Эмоциональное состояние оператора
Условия, в которых приходится работать оператору, весьма разнообразны. С развитием техники число возможных вариантов сочетания самых разнообразных компонентов окружающей среды (температурных, оптических, акустических и т. д.) непрерывно возрастает. Иногда приходится работать при повышенном и при пониженном атмосферном давлении, при высоких и низких температурах, в условиях кислородного голодания, в условиях длительной изоляции от привычной социальной среды и т. д.
Круг задач, выполняемых оператором, также весьма многообразен. Решение некоторых из них предполагает переработку огромных потоков информации в течение ограниченного времени; другие, напротив, связаны с необходимостью вести непрерывное монотонное наблюдение и долгое время не получать никакой информации. Естественно, характер решаемых задач определяет динамику психических состояний человека.
Весь комплекс условий окружающей среды и задач, с одной стороны, определяет психофизиологическую структуру деятельности оператора, а с другой – оказывает на компоненты этой деятельности (скорость переработки и передачи информации, оценка, раскрытие смысла и значимости воспринимаемой информации, принятие решений по выбору оптимальных или рациональных управляющих действий, точность реализации принятых решений и т. д. заметное воздействие, вызывая в некоторых случаях отвлечение внимания, утомляемость, сонливость и т. д., что в конечном итоге может отрицательно сказаться на производственной деятельности.
функциональное состояние оператора зависит от особенностей оператора, которые определяются совокупностью ряда специфических качеств в структуре личности:
особенностями темперамента, в которых проявляются сила, подвижность и уравновешенность нервных процессов;
интересом к операторской деятельности, стремлением совершенствовать свое мастерство;
настойчивостью, решительностью, смелостью в сочетании с инициативностью, сообразительностью и самокритичностью;
способностью к кратковременному большому напряжению при возникновении стрессовых ситуаций;
эмоциональной устойчивостью, особенно эмоционально-моторной и эмоционально-сенсорной устойчивостью;
широтой распределения, быстротой переключения и устойчивостью внимания;
скоростью и точностью сложных видов двигательных реакций, хорошей координацией движений, легкостью образования и переделки двигательных стереотипов.
Под эмоциональным возбуждением понимают состояние, характеризующееся активацией различных функций организма, повышением готовности к различным неожиданным действиям в ответ на эмоциогенные факторы, но преимущественно вне связи с какими-либо целенаправленными волевыми актами.
Под эмоциональным напряжением понимают состояние, характеризуемое активацией различных функций, организма в связи с конкретными волевыми актами, с выполнением активной целенаправленной деятельности или подготовкой к ней, а также с ожиданием какой-либо опасности.
Стресс (повышенная напряженность) – эмоциональное состояние, характеризующееся временным понижением устойчивости различных психических функций (памяти, внимания и др.), координации движений и работоспособности. Стресс является весьма неблагоприятным состоянием, особенно для оператора.
В эмоциональном напряжении исключительное значение принадлежит его психическим компонентам. Это, в частности, подтверждается тем обстоятельством, что напряжение возникает у человека при попадании в трудные, экстремальные, условия, возникающие при умственной и эмоциональной перегрузке, при смене стереотипа действий, условий работы, среды обитания, в случае появления реальной или мнимой угрозы для здоровья или жизни и зависит от особенностей личности человека, его моральных, интеллектуальных и характерологических качеств.
Любое психическое состояние связано с изменением всего организма и может быть описано системой взаимосвязанных параметров, важнейшими среди них являются:
поведенческие (поза, мимика и пантомимика, характер двигательной активности). Важную роль в системе поведенческих параметров играют характеристики речевого поведения (интонация, структура речи и т. д.);
коммуникативно-поведенческие (стиль и характер общения с другими людьми);
вегетативные (реакции сердечно-сосудистой и дыхательной систем, внутренних органов и т. д.);
биохимические (обмен веществ, ферментные и эндокринные реакции).
При описании и анализе состояний исключительно важное значение имеет их так называемая «субъективная сторона», т. е. субъективное отражение как самого состояния организма, так и определяющих его условий (переживания, чувства и т. п.).
Психическое напряжение как один из основных видов психических состояний, возникающих в процессе труда, сопровождается мобилизацией нервно-психической деятельности (прежде всего перестройка анализаторных систем человека), направленной на поддержание тонуса организма и обеспечение оперативной готовности, что необходимо для нормального протекания трудового процесса в данных условиях.
Любая ответственная и опасная ситуация неизбежно вызывает эмоциональное напряжение. В поведении человека появляется общая собранность, повышается бдительность и осторожность, более четкими становятся действия, ускоряются процессы мышления, улучшается концентрация и переключение внимания, укорачивается период ответных реакций, усиливается мышечный тонус, повышается физическая работоспособность и т. д. Происходят сложные вегетативно-соматические и биохимические изменения: увеличивается выделение гормонов, улучшаются показатели сердечнососудистой деятельности, внешнего дыхания и т. п.
Эмоциональное напряжение входит составной частью в сложный комплекс адаптации как приспособительной реакции человека к внешней среде. Оно создает оптимальный уровень для психофизиологических процессов, что способствует наилучшему использованию ресурсов организма в соответствии с требованиями ситуации. Вместе с тем механизм эмоциональной стимуляции имеет предел, превышение которого сопровождается дезинтеграцией физиолого-биохимических процессов, нарушением психической деятельности и поведения человека. Именно превышение этого предела и создает стресс.
Эмоции представляют собой психофизиологическое состояние организма, имеющее ярко выраженную субъективную окраску. Физиологическое проявление эмоций обычно сопровождается мимическими реакциями и двигательными актами, а также изменениями деятельности сердечно-сосудистой системы, желудочно-кишечного тракта, желез внешней и внутренней секреции и т. д. В вовлечении в реакцию многих функций организма и проявляется интегративный характер эмоций, Необходимо отметить, что отрицательные эмоции имеют свои отличительные особенности:
повышенную способность к генерализации по нервному субстрату;
длительную задержку метаболических сдвигов на основе гуморальных факторов (адреналин, норадреналин, тироксин, АКТГ и др.).
Частые длительные отрицательные эмоции могут оказывать неблагоприятное влияние на общее функциональное состояние организма и отрицательно сказываться на состоянии здоровья человека, а также закрепляться в организме по принципу «застойного» состояния.
Состояние эмоционального напряжения операторов может протекать или с преобладанием процессов возбуждения, или с преобладанием тормозных реакций. В соответствии с этим выделяют две формы состояния эмоционального напряжения: возбудимый и тормозной типы. Тормозной тип эмоционального напряжения характеризуется скованностью, однообразной позой, угловатостью и замедленностью движений, резким напряжением мимической мускулатуры, повышенной прикованностью внимания к основному доминирующему объекту с понижением порога восприятия, других раздражителей. При этом обследованные операторы не реагировали на слабые раздражители, не замечали действий окружающих.
Возбудимый тип эмоционального напряжения проявляется в гиперреактивности, суетливости, многословности, легкой отвлекаемости внимания, ускоренном течении процессов мышления, быстрой смене решений в сочетании с поверхностной оценкой ситуации. В обращении с окружающими обнаруживаются элементы раздражительности, резкости, обидчивости и настороженности. У некоторых расторможенность протекает в сочетании с неестественной веселостью при отсутствии контакта с окружающими. При работе на пультах управления возбуждение и расторможенность обнаруживались в непредусмотренных по обстановке действиях: при переключении рычагов управления, включении и выключении контрольных приборов, в частой перепроверке своих действий и т. п. Иногда у некоторых операторов состояние возбуждения, отмечавшееся ранее, сменялось заторможенностью, пассивностью и сноподобным состоянием.
Возбудимые и тормозные формы эмоционального напряжения, как правило, сочетаются с различными вегетативно-сосудистыми реакциями: учащаются сердечные сокращения и дыхание, повышается кровяное давление, изменяется окраска лица (гиперемия, бледность), иногда появляется обильный пот, «гусиная кожа», ощущение сухости слизистых оболочек, жажда, чувство тяжести в области сердца, общая слабость и частые позывы к мочеиспусканию. В необычных и сложных ситуациях эмоциональное напряжение даже у опытных высококвалифицированных операторов иногда может достигать запредельных форм. Запредельные формы эмоционального напряжения обнаруживаются не только в поведении и поступках, которые приобретают в этот момент автоматический характер и слабо корригируются внешними влияниями, но и в различных степенях изменения психической (интеллектуальной) работоспособности.
Крайние степени запредельных форм эмоционального напряжения по своим проявлениям сходны с картиной нарушения психической деятельности. При этом часто ведущим расстройством является сужение объема внимания и диапазона движений вплоть до полного прекращения всякой деятельности.
К основным причинам, способствующим развитию запредельных форм эмоционального напряжения у операторов, относятся: психологическая неподготовленность к работе (отсутствие волевой установки, слабая тренированность, неуверенность в своих силах и в обслуживаемой технике и т. п.); физическое или психическое утомление различного происхождения, предшествующее выполнению операторской деятельности; необычные условия обитания, отрицательно влияющие на трудовую активность оператора.
Эмоциональное напряжение оператора после выполнения высокоответственной работы, как правило, сопровождается психическим истощением (функциональной астенией) различной выраженности. При этом отмечается слабость процессов возбуждения (однообразие позы, малая подвижность, безразличное отношение к делу и товарищам, пассивность, замедленность мышления и т. п.) или торможения (умеренно выраженное двигательное беспокойство, многословность, отсутствие глубины анализа в оценке событий и т. д.). Этот симптомокомплекс обычно наблюдался в течение 1–3 ч (реже до суток), после чего появлялись жалобы на головные боли, усталость, вялость, апатию, поверхностный сон, иногда с кошмарными сновидениями, нередко операторской тематики. При обследовании отмечалось ухудшение памяти, затруднения в распределении и переключении внимания, ошибки восприятия, эмоциональная неустойчивость. После сна часто имели место жалобы на тяжесть в голове, чувство разбитости, боли в мышцах конечностей. Однако по мере включения в работу ощущение недомогания у большей части операторов проходило, у меньшей отмечалось безразличное отношение к работе, снижение инициативы, медлительность. Особенно резко явления психического истощения обнаруживаются у операторов после запредельных форм эмоционального напряжения. Для ликвидации этого состояния необходим более длительный отдых, а иногда и лечебные процедуры. Причем для операторов с ярко выраженными формами реакции утомления необходимо проведение клинического и психофизиологического обследования.
Эмоциональное напряжение в нормальных формах помогает оператору в решении профессиональных задач, так как при этом происходит мобилизация резервов организма. Длительные и сильные состояния эмоционального напряжения, наоборот, отрицательно сказываются на операторской деятельности (особенно при управлении системами, требующими высокого уровня умственной и двигательной активности), вплоть до появления нервно-эмоционального срыва. Такие резкие изменения состояния оператора в условиях напряженности представляют угрозу надежности системы «человек– машина».
Показатели напряженности оператора
Состояние эмоционального напряжения в экстремальных условиях характеризуется изменением ряда объективных показателей (помимо психических, т. е. субъективных): вегетативных, мышечно-двигательных и биохимических.
При состоянии эмоционального напряжения происходят значительные изменения функций вегетативной нервной системы, отражающиеся на сердечно-сосудистой системе, на показателях внешнего дыхания, на кожно-гальванической реакции, потоотделении и т. д. Для объективного изучения эмоционального напряжения оператора в условиях реальной трудовой деятельности могут быть использованы биопотенциалы, генерируемые самыми различными тканями и органами.
Измерение соответствующих биопотенциалов имеет смысл только тогда, когда они хорошо изучены, а их отведение просто и доступно. Вследствие этого наиболее широко используются потенциалы сердца, мозга, скелетных мышц и кожи.
В настоящее время накоплен определенный опыт биологической телеметрии, которая, на наш взгляд, должна найти широкое применение при изучении эмоционального напряжения операторов. Биотелеметрическая система, предназначенная для осуществления надежного и всестороннего медицинского контроля за состоянием основных физиологических функций организма человека, включает в себя: электроды и датчики, необходимые для сбора информации; усилительно-измерительные устройства для преобразования медико-биологических данных в электрические сигналы, пригодные для передачи по радиоканалу; радиоканал, включающий в себя миниатюрный радиопередатчик оператора и приемно-регистрирующую аппаратуру. С помощью биотелеметрической системы можно регистрировать и последовательно передавать несколько медленно изменяющихся параметров по одному радиоканалу (с помощью коммутатора) или одновременно передавать два параметра, различающихся по частотному спектру.
Наиболее простым и надежным показателем психической напряженности является повышение напряжения сердечно-сосудистой системы. Частота сердечных сокращений и артериальное давление хорошо отражают динамику напряженных состояний. Важную роль в учащении сердечных сокращений и повышении систолического давления играет эмоциональный фактор. Уже в период повышенного внимания, ожидания событий, чувства тревоги и т. п. происходит изменение этих показателей. В моменты выраженного эмоционального напряжения частота сердечных сокращений может достигать 170–180 ударов в минуту, а величина систолического давления – 180–190 мм рт. ст. Особую роль играет увеличение вариативности ритма сердечной деятельности. Этот показатель может служить хорошим критерием эмоционального напряжения оператора.
Опыт радиоэлектрокардиографии показывает, что у здоровых лиц даже при наивысшем эмоциональном напряжении биотоки сердца не обнаруживают сдвигов, сходных с патологическими. Поэтому при клинико-физиологической трактовке радиоэлектрокардиограмм в процессе работы операторов сохраняются обычные критерии.
При эмоциональной напряженности, вызванной дефицитом времени, трудностью выполнения задания, помехами и т. д., частота дыхательных движений возрастает, доходя в отдельных случаях до 40–60 движений в минуту. Причем это учащение, как правило, сопровождается уменьшением глубины дыхания, а также укорочением фазы выдоха относительно фазы вдоха. Наиболее информативными являются следующие показатели: частота дыхательных движений, соотношение глубин вдоха и выдоха, амплитуда дыхательных волн, а также задержки (перебои) дыхания.
Чувствительным показателем вегетативных сдвигов организма оператора, вызываемых эмоциональным напряжением, является кожно-гальваническая реакция (КГР). Процесс потоотделения посредством нервных и гуморальных путей тесным образом связан со многими другими системами организма, и в разнообразных потоотделительных реакциях человека находят отражение не только соотношение между уровнем теплопродукции и условиями охлаждения, но и состояние нервной системы, акклиматизация к внешним условиям и т. д.
Существует два способа измерения КГР: измерение сопротивления кожи подведенному извне току (метод Фере) и регистрация собственного электрического потенциала кожи (метод Тарханова). Преимуществом первого метода является возможность измерения исходного уровня сопротивления кожи и кратковременных изменений сопротивления, сопровождающих сенсорные раздражения, а также состояния высших психических функций, которые связаны с процессами напряжения внимания и памяти, эмоциями. В этих ситуациях КГР (по Фере) выражается в виде увеличения числа спонтанных колебаний и в падении сопротивления кожи. КГР с ладоней рук в сочетании с психическим напряжением, вызываемым проведением пробы отыскивания чисел с переключением, сложением однозначных и двузначных чисел в уме и т. д., в условиях микроклиматического комфорта может' служить тонким индикатором для изучения влияния на организм вредных факторов внешней среды.
Среди других сдвигов вегетативного характера в состоянии эмоциональной напряженности операторов можно наблюдать изменение температуры разных участков кожи (увеличение или понижение в зависимости от характера раздражителя), увеличение количества миганий глаз, измеряемых методом бесконтактной регистрации.
Чувствительным показателем мышечного напряжения является увеличение электрической активности неработающих мышц, выражающейся в амплитудных и частотных изменениях потенциалов, отводимых от мышц шеи, мышц лба и предплечья.
Одной из типичных особенностей эмоционального напряжения является большой разброс данных, получаемых при изучении моторных (и сенсорных) функций. Этот факт позволяет в некоторых случаях отдифференцировать состояние утомления от состояния эмоционального напряжения. Например, стойкое увеличение латентного периода двигательной реакции, возникающее при утомлении, является достаточно точным критерием для разграничения этих состояний.
В состоянии эмоционального напряжения у оператора наблюдается нарушение дозировки усилий. У некоторых это выражается в мышечном напряжении, а у других – в мышечной слабости. В условиях эмоционального возбуждения при дефиците времени происходит изменение дозировки усилия в сторону увеличения, а у эмоционально неустойчивых лиц, кроме того, плавные движения заменяются резкими. Непроизвольное напряжение мышц фиксируется с помощью механических регистраторов и тензодатчиков, вмонтированных в рычаги управления.
Информативны динамика изменения времени мышечной выносливости по сравнению с исходными величинами, данные изучения функциональных изменений со стороны анализаторских систем оператора.
Применение спектрального анализа записей биопотенциалов мозга позволяет установить корреляцию между эмоциональным возбуждением и ритмами коры головного мозга. Запись электроэнцефалограмм при эмоциональном напряжении характеризуется увеличением амплитуды тета-ритма («ритм напряжения») с частотой 4–6 Гц.
Показателями ЭЭГ в настоящее время можно пользоваться только при моделировании эмоций в лабораторных условиях. Снятие биопотенциалов в реальных условиях трудовой деятельности операторов затрудняется из-за необходимости экранизации человека, дифференциации тета-ритма от помех, вызываемых мышечным напряжением в состоянии активности, и т. п.
Утомление оператора
Приспособление психофизиологических функций к рабочей деятельности обеспечивает высокий уровень работоспособности и соответствующее качество труда. Внешним выражением приспособления организма к работе является изменение физиологических показателей работоспособности, которые устанавливаются на определенный отрезок времени, соответствующий периоду высокой работоспособности (в течение 2–3 ч на протяжении рабочей смены).
Параллельно с показателями работоспособности во многих случаях изменяются и показатели производительности труда. На протяжении рабочей смены отмечается период врабатывания или вхождения в работу (продолжительностью около 0,5–1,0 ч) и период высокой работоспособности (продолжительностью около 1–2 ч). В конце рабочего дня, а также перед обеденным перерывом отмечается снижение работоспособности и производительности труда, которое объясняется развитием утомления.
В целом на протяжении рабочей смены последовательно развиваются три характерных процесса:
врабатывание, или вхождение в работу,
поддержание высокого уровня работоспособности,
утомление.
Нередко эта динамика работоспособности развивается дважды на протяжении рабочего дня: в первой (дообеденной) и во второй (послеобеденной) половине рабочего дня.
В психофизиологическом механизме врабатываемости и утомления выступают особенности противоположного характера. Если во время врабатывания происходят формирование и уточнение рабочих динамических стереотипов и соответствующие изменения в протеканиях различных основных функций различных систем, то в период утомления наблюдаются разрушение динамических стереотипов и изменение протекания элементарных физиологических функций. Если во время врабатывания происходит повышение уровня производительности труда, то во время утомления – ее уменьшение.
Тяжесть и утомительность различных видов труда определяются следующими факторами:
затратой физических усилий,
напряжением внимания,
темпом работы,
рабочим положением,
монотонностью труда,
температурой и влажностью внешней среды,
запыленностью и загрязненностью воздуха,
шумом,
вибрацией, вращением и толчками,
освещением.
Каждый фактор и его градации имеют условные измерители (баллы), которые могут быть выражены в процентах времени, необходимого для отдыха при работе под действием данного фактора. При оценке суммарного воздействия на организм нескольких факторов соответствующие им баллы и проценты могут складываться арифметически или геометрически (сложение квадратов и извлечение из суммы квадратного корня).
В основу классификации работ по степени тяжести физического или по напряженности умственного труда в настоящее время принимают градацию степени утомления по виду кривой работоспособности. Поскольку у здорового, опытного и тренированного оператора кривая работоспособности в норме состоит из трех периодов – быстро протекающего врабатывания, продолжительной устойчивой работоспособности и короткого снижения работоспособности в последние час-полчаса работы, – виды труда, характеризующиеся такой конфигурацией кривой работоспособности, относятся к I степени утомления и к 1 категории тяжести и напряженности. Нарушения силовых отношений в нервной деятельности, утрата плавности динамики работоспособности в период врабатывания, раннее наступление утомления, уменьшение производительности труда характеризуют II степень утомления и соответствуют II категории тяжести и напряженности труда. К III степени утомления и соответственно к III категории тяжести и напряженности труда предлагается относить трудовые действия, характеризующиеся значительным нарушением координационной функции центральной нервной системы в связи с накоплением следов утомления. Это состояние приобретает застойный характер и переходит в переутомление. Могут нарушиться привычные рабочие движения (разрушается рабочий динамический стереотип). При этом резко нарушается кривая работоспособности, периодичность и соотношение ее отрезков утрачиваются, не наблюдается устойчивого состояния работоспособности, падает производительность труда, растет количество бракованных изделий.
Биологическим критерием тяжести и напряженности труда и его условий, кроме утомления, является заболеваемость работающих.
Характер заболеваемости соответствует условиям труда: болезни органов дыхания (хронический бронхит, эмфизема легких, пневмо-склероз и др.), легочно-сердечная недостаточность, заболевания нервно-мышечного аппарата (радикулиты, нейромиозиты).
Причина утомления коренится в изменениях функционального состояния нервных центров, в которых во время работы наряду с элементарными процессами, наблюдаемыми в клетках и тканях, проходят более сложные процессы, отражающие способность нервных клеток суммировать в себе следовые процессы, остающиеся после каждой свойственной им реакции. В учении Н. Е. Введенского о парабиозе и А. А. Ухтомского об усвоении ритма установлены определенные эффекты суммации последовательных следовых процессов. В первой фазе воздействия многократно повторяющихся раздражений происходит такое изменение функционального состояния нервных клеток, которое характеризуется повышением скоростей развития и. завершения возбуждения, т. е. повышением функциональной подвижности (лабильности) или усвоения ритма. Во второй фазе продолжающееся воздействие раздражителей и соответствующий процесс суммации возбуждения приводят к противоположному результату – к уменьшению лабильности и к развитию состояния, приближающегося при дальнейших воздействиях к парабиозу.
Уменьшение скорости нервных процессов, проявляющееся в увеличении скрытого времени зрительно-моторной реакции и в уменьшении критической частоты слияния мельканий, снижает точность рабочих действий и нарушает слаженный в период врабатывания рабочий динамический стереотип. В конечном счете, все описанные процессы приводят к уменьшению производительности труда и снижению качества работы.
Было бы неправильно думать, что снижение функциональной подвижности нервной системы немедленно приводит к уменьшению производительности труда. Между изменением функционального состояния нервной системы и уровнем производительности труда имеется расхождение в том смысле, что уменьшение производительности труда наступает несколько позже, в течение некоторого времени работа продолжается с прежними производственными показателями, несмотря на то что физиологические показатели уже начали ухудшаться.
В данном случае работа продолжается при требуемых производством условиях за счет привлечения дополнительных факторов социально-психологического порядка (сознание ответственности за порученную работу). Привлечение дополнительных раздражений, адресованных к второй сигнальной системе, способно в значительной мере повысить функциональную подвижность нервной системы. Это видно из результатов опытов, в которых определялись показатели скрытого периода и критической частоты слияния мельканий у исследуемых, находящихся под воздействием раздражителей второй сигнальной системы. Если исследуемого просить одновременно с осуществлением ответного движения нажатия на телеграфный ключ считать число оборотов стрелки, на движение которой он реагирует, то происходит заметное достоверное уменьшение продолжительности скрытого периода реакции.
С другой стороны, привлечение дополнительных раздражений ускоряет процесс развития парабиотического торможения и, следовательно, снижения работоспособности, характерного для утомления. Кроме того, дополнительные раздражения, действуя как чрезвычайно сильные, вызывают быстрое развитие охранительного торможения и тем ускоряют и углубляют нарушение рабочего динамического стереотипа.
При работе, связанной с воздействием раздражителей эмоционального характера (работа на пультах управления сложной техникой), эти чрезвычайные раздражения вызывают резкие тревоги, проявляющиеся в изменениях работы сердечно-сосудистой и эндокринной систем. Вслед за реакцией тревоги идет реакция защиты, связанная с выравниванием наступавших функциональных сдвигов. Все эти процессы еще больше углубляются снижением работоспособности и производительности труда.
Развитие охранительного торможения в процессе трудовой деятельности свидетельствует о том, что в производственных условиях снижение работоспособности в связи с утомлением вызывается не непосредственно истощением запасов энергии в нервных клетках, не засорением их продуктами распада, а предшествующим этим процессам нарушением ритма деятельности и рабочего динамического стереотипа. В общем случае указанные обратимые функциональные нарушения вызываются суммированием следов возбуждения, остающихся после каждого рабочего действия. В каждом же частном случае конкретной производственной работы суммирование следов возбуждения имеет свои особенности в зависимости от характера выполняемых рабочих действий и условий труда на конкретном – участке производства. Конкретные психофизиологические механизмы суммирования следовых процессов в нервной системе, приводящие к утомлению, различны и зависят от условий труда.
В каждом конкретном виде труда необходимо применять такие оздоровительные меры, которые могли бы в наибольшей степени соответствовать психофизиологическим процессам, развивающимся во время данного вида трудовой деятельности, в частности свойственному этому виду труда физиологическому механизму утомления. Установление у операторов тех или иных черт одного из психофизиологических механизмов производственного утомления является важным условием для выбора системы оздоровительных мер и для уточнения контроля и оценки их эффективности.
Наиболее эффективные средства предупреждения утомления при работе на производстве – это средства, нормализующие активную трудовую деятельность человека. Уменьшение плотности рабочего времени, наличие простоев на протяжении рабочего дня не только не отделяют наступления и развития утомления, но могут и ускорить и углубить его. Исключение случайно возникающих перебоев в работе, простоев и штурмовщины; ритмизация трудовых процессов являются важными условиями поддержания высокого уровня работоспособности. На фоне нормального протекания производственных процессов одним из важных физиологических мероприятий против утомления является правильный режим труда и отдыха. В сменном режиме труда и отдыха должно быть предусмотрено физиологически и психологически обоснованное чередование периодов работы и перерывов для отдыха и приема пищи.
Перерывы различаются по своему значению и продолжительности. В середине рабочего дня назначается обеденный перерыв, продолжительность которого должна составлять 1 ч или 50 мин (в отдельных случаях возможны перерывы меньшей продолжительности, что должно компенсироваться другими мерами облегчения и оздоровления труда). В первую, дообеденную половину рабочего дня и во вторую, послеобеденную назначаются в счет рабочего времени дополнительные перерывы для отдыха, продолжительность которых в зависимости от особенностей данного вида труда может изменяться от 5 до 15 мин (редко больше 15 мин).
Расположение дополнительных перерывов на протяжении рабочего дня, их количество и содержание (пассивный или активный отдых) определяются на основании данных физиологического и психологического изучения динамики работоспособности. В промежутках между рабочими операциями (а также между рабочими элементами и движениями) имеются короткие микропаузы продолжительностью от нескольких секунд до 2–3 мин.
Изменяя соответствующим образом число, продолжительность, расположение в течение смены и содержание дополнительных перерывов, специалист в области физиологии и психологии труда имеет возможность создать на конкретном участке производства такой режим труда и отдыха, который обеспечит достижение высокого и устойчивого уровня работоспособности, производительности труда и оптимальное приспособление физиологических и психических функций к текущей трудовой деятельности.
 Нередко
вопрос о режиме труда и отдыха практические
работники решают в отношении конкретного
участка производства, исходя только из
местных организационных условий (работа
столовой, подготовка оборудования и
пр.), что неправильно, так как в режиме
труда и отдыха главное – поддержание
высокой работоспособности и нормализация
физиологических процессов работающих.
Нередко
вопрос о режиме труда и отдыха практические
работники решают в отношении конкретного
участка производства, исходя только из
местных организационных условий (работа
столовой, подготовка оборудования и
пр.), что неправильно, так как в режиме
труда и отдыха главное – поддержание
высокой работоспособности и нормализация
физиологических процессов работающих.
При решении вопроса о режиме труда и отдыха также иногда применяется чисто эмпирический подход, и режим труда и отдыха находится путем сравнения двух или трех произвольно выбранных вариантов. Этот путь также нельзя признать правильным, так как в результате случайного подбора сочетаний различных условий труда нельзя рассчитывать получить оптимальный для данной конкретной работы вариант режима труда и отдыха. Единственно правильный путь разработки физиологически и психологически обоснованного режима труда и отдыха основывается на тщательном изучении динамики работоспособности.
Инженерная психология и проектирование систем «человек-машина»
Проектирование средств отображения информации
Классификация и общие инженерно-психологические требования к средствам отображения информации
С помощью средств отображения информации (СОИ) человек-оператор получает осведомительную информацию о состоянии объекта управления. Конкретные типы СОИ, их количество и способы взаимного размещения выбираются с учетом особенностей работы анализаторов человека (прежде всего зрительного), закономерностей формирования оперативного образа объекта управления, характера функций оператора в системе «человек – машина», последовательности и степени важности выполняемых операций, требуемой скорости и точности работы.
Оптимальное проектирование средств отображения информации имеет своей конечной целью обеспечение для человека возможности своевременного получения необходимой информации, ее анализа, логической обработки и принятия в результате этого нужного решения по управлению. При таком проектировании необходимо обеспечить единое выполнение оперативных (необходимая производительность и достоверность отображения информации, достаточная информационная емкость и гибкость СОИ, высокая точность отображения), технических (высокая надежность, большой срок службы, малая потребляемая мощность, необходимые габариты) и инженерно-психологических требований. Во многих случаях эти требования могут быть противоречивыми, поэтому удовлетворение их иногда достигается компромиссным путем.
Необходимая для рассмотрения общих инженерно-психологических требований классификация СОИ приводится на рис. 9.1.
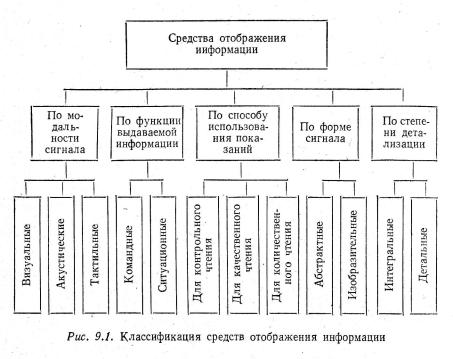
Наибольшее применение в деятельности оператора имеет зрительная (визуальная) индикация, поэтому дальнейшее изложение материала будет вестись применительно именно к этому виду отображения информации.
По функции выдаваемой информации СОИ делятся на целевые (командные) и ситуационные, Первые отображают цель управления («конечную точку», которая должна быть достигнута) и дают сведения о необходимых действиях. Такими индикаторами являются, например, командные табло («Идите», «Стойте» и т. п.), судовой телеграф задания хода или числа оборотов двигателя и т. д.
Ситуационные индикаторы дают не только информацию об отношении хода технологического процесса к программе, но и обрисовывают ситуацию как таковую. Примером индикаторов такого типа может служить датчик температуры в доменной печи или счетчик числа оборотов двигателя.
По способу использования показаний СОИ разделяются на три группы:
Для контрольного (проверочного) чтения. С помощью таких индикаторов оператор решает задачу типа «да – нет»: работает машина или нет, в норме или нет какие-либо параметры и т. п.
Для качественного чтения. Подобные индикаторы дают информацию о направлении изменения управляемого параметра. Например, возрастает он или падает; если отклоняется, то в какую сторону и т. д.
Для количественного чтения. Такие индикаторы передают информацию в виде численных значений (в аналоговой или цифровой форме). К этой группе относится абсолютное большинство используемых приборов и индикаторов.
По форме сигнала, т. е. по отношению его свойств к свойствам объекта, различают абстрактные и изобразительные СОИ. В первом случае сигналы передаются в виде абстрактных символов (цифры буквы, геометрические фигуры и др.), отображающих в закодированном виде состояние объекта. Выбор символов определяется из соображений обеспечения оптимальной эффективности кодирования. Во втором случае передача сигналов осуществляется в форме изображений. В этом случае качество передачи определяется полнотой изображения – степенью схематизации, детализации и количеством воспроизводимых свойств.
По степени детализации информации СОИ могут быть интегральными и детальными. На интегральных индикаторах информация выдается оператору в обобщенном виде, чтобы сократить или вообще исключить время на ее выделение, поиск и синтезирование. В качестве примера интегральной модели технологического процесса можно привести график, вычерчиваемый в реальном масштабе времени в пределах зоны допустимых отклонений. По положению рабочей точки относительно границ зоны оператор может определить момент своего вмешательства в протекание процесса и, затребовав необходимую детализированную информацию, выработать необходимые управляющие воздействия.
При использовании интегральных методов следует помнить, что у оператора может возникнуть потребность в детализации обобщенной информации. Для этого должна быть предусмотрена возможность вызова информации на средства отображения по запросу оператора.
Средства отображения информации являются технической основой для построения информационной модели процесса управления, с которой и работает оператор в ходе своей деятельности. Для того чтобы эта деятельность была эффективной, информационная модель должна удовлетворять трем важнейшим требованиям: по содержанию она должна адекватно отображать объекты управления и окружающую среду; по количеству информации – обеспечивать оптимальный информационный баланс и не приводить к таким явлениям, как дефицит или перегрузка информацией; по форме и композиции информационная модель должна соответствовать задачам оператора по управлению и его психофизиологическим возможностям по приему и переработке информации.
Рассмотрим возможные способы удовлетворения этим требованиям.
1. Для отображения состояния отдельных объектов используются разнообразные элементы индикации. Ими являются приборы, преобразующие электрические и другие сигналы в визуальную информацию в форме, наиболее пригодной для зрительного восприятия и удовлетворяющей целям и потребностям деятельности человека. В качестве элементов индикации могут использоваться: лампочки накаливания, стрелочные измерительные приборы, оптико-механические проекционные приборы, газоразрядные и электролюминесцентные индикаторы, электроннолучевые трубки, полупроводниковые светодиоды и т. п.
Каждый элемент индикации может наиболее адекватно отобразить определенные характеристики управляемого объекта. Так, для отображения бинарных состояний системы (работает – не работает, включено – выключено и др.), а также для опознания объекта для предупреждения, предостережения удобно применять лампы накаливания или газоразрядные индикаторы: эти элементы имеют достаточную яркость, четкость и надежны в работе.
Для отображения сообщения, словесной инструкции, последовательности операций наиболее подходят сигнальные оптические табло с различными трафаретами (транспаранты) или электролюминесцентные индикаторы.
Для отображения количественных показателей необходимы устройства типа счетчика, когда видна только одна цифра (число). В этих случаях лучше использовать цифровые индикаторы (вакуумные, газоразрядные, электролюминесцентные).
Для анализа работы оборудования рекомендуется применять электроннолучевые трубки, так как с их помощью можно показать связь между многими параметрами.
С помощью рассмотренных элементов создаются разнообразные системы отображения информации. Они могут быть выполнены в виде табло, мнемосхем, приборных панелей и щитов.
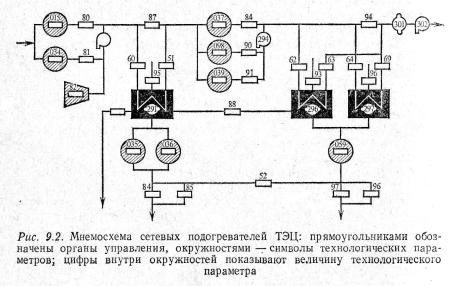
Мнемосхема (рис. 9.2) представляет собой условное графическое изображение производственного процесса в виде комплекса символов, изображающих его отдельные элементы с их взаимными связями. Основное достоинство мнемосхемы – высокая наглядность отображения информации.
На табло данные отображаются в виде таблиц (рис.9.3), информационное поле которых строится с учетом назначения табло, а также с учетом вида и объема отображаемой информации. Табло обычно используется для отображения суммарных данных о состоянии объектов управления и о выполнении ими поставленных задач.
Приборная панель (рис. 9.4) представляет совокупность отдельных приборов и индикаторов, каждый из которых несет информацию об одном или нескольких параметрах управляемого объекта. Приборные панели целесообразно применять в том случае, когда число контролируемых оператором параметров невелико и они слабо взаимосвязаны между собой. В ряде случаев система отображения информации делается комбинированной: например, мнемосхема является составной частью табло или приборной панели; на приборной панели часть информации отображается с помощью табло другой не менее важный вопрос, возникающий при создании информационной модели, адекватной управляемому объекту, касается соотношения признаков сигнала и объекта по качеству.
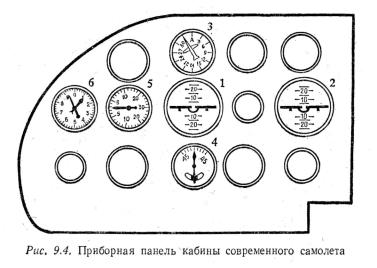
Как уже указывалось, все сигналы, с которыми имеет дело оператор, можно разделить на два больших класса: сигналы-изображения, в которых свойства сигнала так или иначе воспроизводят свойства объекта, и сигналы-символы, которые только обозначают свойства объектов, т. е. являются их условными знаками. Степень полноты воспроизведения объекта в сигнале-изображении может быть различной: от более или менее полной картины (типа телевизионного цветного объемного изображения) до схемы (контурный рисунок, чертеж).
Как правило, латентный период реакции на изображение короче (и ближе по времени к реакции на предмет), чем на символ. Среднее время реакции на предмет – 0,4 сек; на цветной рисунок – 0,9 сек, на символ (слово) – 2,8 сек. Исследования показывают, что даже частичное подобие сигнала объекту повышает скорость декодирования в операциях приема информации, передаваемой с помощью сигналов-изображений, процессы восприятия и декодирования как бы слиты благодаря действию механизма ассоциации по сходству, что и приводит к сокращению времени трансформации. При использовании сигналов-символов эти процессы могут расходиться, что, естественно, требует дополнительного времени для трансформации образа сигнала в концептуальную модель.
Однако это не значит, что сигнал-изображение всегда является наилучшим. Применяя сигналы этого типа, мы выигрываем в скорости и помехоустойчивости приема информации, но можем проиграть в точности (последняя здесь полностью определяется возможностями измерительной функции анализаторов). При выборе типа сигнала в конечном счете следует исходить из задач, решаемых оператором. В большинстве современных средств отображения используются сигналы, сочетающие элементы изображения и символы.
В последнее время большое внимание привлекает идея разработки особой разновидности сигналов-символов, отображающих различные признаки объекта управления в виде целостной пространственной структуры («пространственное кодирование»). Это графическая индикация, являющаяся одним из экономичных способов, передачи человеку информации о физических величинах (диаграммы, графики, номограммы и т. п., получаемые с помощью средств электроники на основе переработки первичной информации в информационно-логических машинах). Графическая индикация не является изображением в подлинном смысле слова, так как не воспроизводит свойств объекта. Но вместе с тем в ней различные признаки объекта отображаются в виде целостной условной картины. Есть основания предполагать, что замена массы отдельных приборов, передающих дискретно информацию об отдельных параметрах управляемого объекта, целостной пространственной схемой (условной картиной), изменяющей свою конфигурацию в соответствии с изменениями параметров, позволит значительно повысить скорость и надежность приема информации человеком. Такого рода интегральная система кодирования рассчитана на естественный для человека симультанный способ оценки комплекса параметров.
2. Другим важным требованием, предъявляемым к информационной модели, является соответствие скорости выдаваемой ею информации пропускной способности оператора. Организация потоков информации должна исключать как перегрузку, так и недогрузку оператора.
Для уменьшения перегрузки необходимо:
предоставлять информацию оператору с необходимым упреждением к началу исполнения;
сократить поток информации до необходимого минимума;
предусмотреть возможность фильтрации информации, что позволяет оператору отбирать данные, соответствующие его возможностям и условиям работы;
разработать рациональную схему деятельности оператора позволить оператору использовать для принятия решения максимальное время (в пределах общего времени, отведенного на выполнение задачи);
сохранять на индикаторе информацию по желанию оператора на необходимое время.
недогрузка оператора вызывает ослабление внимания, что приводит в конечном итоге к потере ритма и ошибкам.
Для уменьшения недогрузок необходимо:
сократить до минимума время от запроса до воспроизведения информации, а также время формирования изображения;
обеспечить достаточную интенсивность потока информации (при интенсивности потока 1–10 сигналов в час уже может наблюдаться заметное ослабление внимания);
принять меры к повышению «заметности» вновь появляющейся информации (мерцание, яркость, громкость);
ограничить площадь размещения информации;
обеспечить оператору возможность контроля за правильностью своих действий.
Количественная оценка потоков информации при проектировании СОИ проводится с помощью математических методов теории массового обслуживания и теории информации. В процессе испытаний оценка уточняется экспериментальным путем.
3. И, наконец, еще одним требованием, предъявляемым к информационной модели, является соответствие ее возможностям оператора по приему и переработке поступающих сигналов. Для выполнения этого требования прежде всего должны учитываться рассмотренные ранее характеристики зрительного и других анализаторов. Так, например, расположение приборов и индикаторов должно проводиться с учетом размеров поля зрения человека, светотехнические характеристики индикаторов должны соответствовать энергетическим возможностям зрительного анализатора, размеры отдельных символов должны быть не менее 35', для устранения мельканий смена изображений должна происходить с частотой, превышающей критическую, и т. д.
При построении информационной модели должны учитываться особенности памяти и оперативного мышления. Для этого необходимо обеспечить соответствие информационной модели доминирующему оперативному образу и тому эталону в памяти, с которым сопоставляется воспринятый сигнал (или совокупность сигналов). Желательно также осуществить обобщение информации путем выбора более общей характеристики процесса (объекта). Это реализуется, например, в том случае, когда начальные точки отсчета всех приборов фиксируются в одном положении, когда создаются «картинные» индикаторы, где ряд разрозненных признаков ситуации сливается для оператора в один образ, из которого он может легко извлечь нужную информацию.
При построении информационной модели очень важно соблюдать последовательность организации внимания: расположение элементов модели должно соответствовать наиболее вероятной последовательности изменений состояний управляемых объектов. Следует стремиться также к максимальной разгрузке оперативной памяти.
Для выполнения последнего требования необходимо:
использовать код, максимально ассоциируемый с жизненным опытом человека. Например, красный цвет обычно обозначает опасность, запрет;
обеспечить максимальное соответствие информационной модели реальным объектам и процессам в соответствии с динамикой доминирующих оперативных образов. Для этого, например, должны быть выполнены правила совместимости индикаторов и органов управления;
иметь на рабочем месте инструкции, выполненные в виде алгоритмов в графо-символьном выражении;
предусмотреть (особенно в аварийных и других ответственных ситуациях) возможность «подсказки» оператору о его дальнейших действиях;
обеспечить такие условия, чтобы количество одномоментно воспринимаемой оператором информации и длительность ее сохранения не превышали возможности оперативной памяти человека.
Наибольшие трудности выполнения всех рассмотренных требований возникают при разработке абстрактных СОИ. Их качество во многом зависит от правильного выполнения инженерно-психологических требований к отдельным видам зрительной индикации и нахождения оптимальных способов кодирования поступающей к оператору информации.
Инженерно-психологические требования к отдельным видам зрительной индикации
В абстрактных СОИ, представляющих оператору информацию в виде сигналов-символов, используются три основных формы зрительной индикации: стрелочная, знаковая, графическая. Рассмотрим основные требования, предъявляемые к каждому из этих видов индикации.
Стрелочная индикация. Этот вид индикации является еще до сих пор довольно распространенным, несмотря на ряд недостатков по сравнению с другими видами индикации (отсутствие наглядности, возможность передавать информацию только об отдельных параметрах, относительно большая площадь циферблатов). Большое влияние на считывание показаний оказывают отдельные элементы стрелочного прибора: шкалы, стрелки, цифры, штрихи, расстояния между отметками и т.п.
Так, например, установлено, что шкалы приборов, несущих наиболее важную информацию и, следовательно, требующих высокой точности отсчета, должны иметь диаметр 120-130 мм, менее важную – 70-80 мм, а остальные – 50 мм. На основании ряда исследований была составлена номограмма, позволяющая определять необходимые для проектирования характеристики шкал исходя из заданной погрешности чтения и дистанции наблюдения (рис. 9.5).

В первом квадранте номограммы (I) представлена зависимость средней ошибки отсчета, выраженной в долях цены оцифрованного деления, от углового размера интервала между оцифрованными делениями (верхние кривые), а также зависимость ошибочных отсчетов (в процентах по отношению к их общему числу) от этого размера (нижние кривые). Указанные зависимости приведены для двух отношений цены наименьшего деления к цене оцифрованного деления (п = 0,6 и n = 0,1). Второй квадрант (II) остается свободным для построения при расчете конкретных шкал.
Третий квадрант (III) позволяет переводить линейное расстояние между оцифрованными делениями в угловую величину, измеряемую в плоскости циферблата. Четвертый квадрант номограммы (IV) предназначен для перевода углового размера оцифрованного интервала в линейный в зависимости от дистанции наблюдения.
Клиновидная стрелка имеет преимущество перед другими. Кроме того, оператор быстрее и точнее ориентируется в показаниях прибора, если кончик стрелки не касается делений шкалы, а находится на некотором расстоянии от них, но не более 1,6 мм (рис. 9.6).
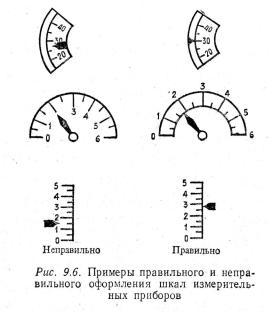
Оптимальная ширина штриха в стрелочных приборах равна 0,8–1,0 мм (для малых приборов) и 1,2–1,5 мм (для больших). Оцифрованные штрихи должны быть в 2-4 раза толще и в 2-2,5 раза длиннее остальных. Отношение ширины мелких штрихов к их высоте – от 1:4 до 1:6. Показано, что с увеличением углового размера мелкого деления от 3,44' до 6,88' точность считывания возрастает, а время безошибочного считывания сокращается весьма интенсивно. Однако дальнейшее увеличение (в пределах от 6,88' до10,32') не дает каких-либо существенных улучшений.
Исходным моментом чтения показаний прибора является различение и оценка пространственного положения стрелки. При очень коротких экспозициях (0,1-0,2 сек) линейной шкалы цифры и деления на ней не опознаются, но положение стрелки оценивается точно. Опытный оператор, хорошо представляющий шкалу, может достаточно точно определить то или иное показание при кратком взгляде на прибор, угадывая отображаемую величину просто по положению стрелки.
Время чтения показаний приборов зависит от «перепадов» расстояний между ними по глубине, (от разницы расстояний до глаза). Так, при переносе взора с прибора, расположенного на расстоянии 66 см от глаза, на прибор, расположенный на расстоянии 99 см, время чтения показаний увеличивается на 5–14%. А при переносе взора с первого прибора (66 см от глаза) на прибор, отстоящий на 114 см, время чтения увеличивается на 8–21%. Дополнительное время обусловлено необходимостью смены конвергентной установки глаз.
При разработке приборных панелей нередко возникает задача расположить большое число источников информации на ограниченной площади. Одним из путей ее решения является уменьшение размеров шкал. Но известно, что чтение слишком малых шкал затруднено и сопровождается большим числом ошибок. Как выход из противоречия между требованиями техники и возможностями оператора некоторые авторы предлагают использовать последовательное высвечивание нескольких шкал на экране электроннолучевой трубки, т.е. в одном и том же месте.
Изучение возможностей оператора по переменному чтению двух шкал, высвечиваемых одна за другой на одном и том же месте (в случайном порядке или по желанию оператора), показало, что точность отсчета в этих условиях уменьшается незначительно по сравнению с чтением одиночных шкал. После небольшой тренировки оператор считывает показания сменных шкал с той же точностью, что и показания одиночных.
Внешняя освещенность от 20 до 700 лк существенно не влияет на чтение показаний приборов и не маскирует различия их читаемости, определяемого оформлением шкал. Несигнальный белый шум интенсивностью в 90 дБ при воздействии в течение 10 мин.также не оказывает влияния на чтение приборов. Изменение точности и скорости чтения наступает лишь после 15–20-минутной работы в условиях шума, что связано с его утомляющим действием.
Экспериментально показано, что по мере тренировки формируется навык чтения стрелочных приборов (это выражается в повышении точности и сокращении латентного времени ответов).
Выделяют два основных этапа в формировании навыка чтения приборов. На первом наблюдается резкое или постепенное (в зависимости от индивидуальных особенностей испытуемого) сокращение латентного периода реакции и большая вариантность ошибок. На втором этапе скорость и точность чтения становятся относительно стабильными и высокими. На первом этапе решающую роль играют развернутые речемыслительные процессы, которые впоследствии на втором этапе свертываются. Вероятно, существенным компонентом навыка является дифференцированное представление шкалы, которое позволяет человеку быстро и точно оценивать показания прибора даже при коротких экспозициях, достаточных лишь для различения положения стрелки.
3наковая индикация. Использование знаков (цифр, букв, геометрических фигур, пиктографических отметок и т. п.) для передачи информации человеку-оператору становится сейчас все более и более популярным в среде проектировщиков.
Вопрос об их оптимальном начертании возникает при разработке многих видов индикаторов (стрелочные приборы, счетчики, люминесцентные табло, знаковые электроннолучевые трубки и т.д.).
Видимость (различимость) цифр на электролюминесцентном индикаторе зависит от яркости их свечения и внешней освещенности. По средним данным, с увеличением углового размера до 35' («критическая точка») пороговое время опознания резко сокращается, но при дальнейшем увеличении остается почти на одном и том же уровне. Изменение освещенности в пределах от 100 до 1000 лк почти не влияет на скорость опознания, что объясняется, по-видимому, действием механизма адаптации. Этот же размер оказался критическим и при освещённости 20 лк, хотя пороговое время опознания увеличилось примерно на 10 мсек. По освещенности 1 и 10 лк в критической точке оказался размер 51'40». Время опознания при такой низкой освещенности значительно увеличивается.
Цифры, высвечиваемые на экранах электроннолучевых трубок обратной контрастности, достаточно точно и быстро опознаются при значительно меньших размерах (6–9' для белых цифр на темном фоне).
В условиях неограниченной экспозиции оперативный порог различения контура знака находится в пределах 9-15', наименьшей детали 3'30»–4'30», букв 6–9'. При ограничении времени экспозиции (0,05 сек) размер контура знака должен быть 60', наименьшей детали 30–40', букв 40–50'. Однако при построении сложного знаке необходимо учитывать соотношение между числом деталей, их размерами и размерами контура, причем с увеличением числа деталей размеры контура должны быть увеличены.
Характерной особенностью существующих электроннолучевых трубок является мелькание изображения на экране, отрицательно сказывающееся на работе оператора. Значит, нужно увеличить частоту смены кадров, что приводит к усложнению и удорожанию оборудования, поэтому возникает необходимость определения допустимой минимальной частоты смены кадров. Критическая частота слияния мельканий для знаков небольшого размера (33'), имеющих яркость 1–2 нит, равна 14 Гц, она возрастает до 35 Гц с увеличением яркости до 120 нит. С уменьшением размеров знака и его площади критическая частота слияния мельканий уменьшается. Изменение контраста в пределах рабочей зоны на нее не влияет.
Графическая индикация. Как отмечалось, применение графической индикации во многих случаях повышает скорость и надежность процессов управления в системах «человек– машина». В инженерной психологии изучались особенности восприятия графической индикации, отображающей скорость движущихся объектов.
Как показали эксперименты, глазомерная оценка длины сплошной линии (а следовательно, величины скорости) даже в том случае, если на ней имеется отметка масштабной единицы, весьма неточна. При замене сплошной линии на штриховую задача глазомерной оценки длины упрощается. Для определения скорости испытуемого достаточно подсчитать количество штрихов и умножить полученное число на цену деления. Точность определения величины скорости повышается более чем в три раза. Глазомерные ошибки здесь возникают только при оценке последнего штриха, если он короче масштабной единицы. При этом наиболее точно оценивается штрих, длина которого составляет ¼ масштабной единицы. Точность определения скорости увеличивается, если штрихи объединяются в группы (лучшие результаты при группировке по 2, 3 и 4).
Время определения скорости зависит от масштаба изображения, т. е. от цены деления. По возрастанию латентного периода речевой реакции цены делений располагаются в следующем порядке: 100, 500, 300, 400, 200, 25, 250, 700. При глазомерной оценке положения прямой линии допускаются значительные ошибки (до 2°). Однако, используя специальное приспособление, эти ошибки можно уменьшить. Таким приспособлением может быть накладываемый на экран индикатора вращающийся диск, разграфленный параллельными линиями. Вращая диск, оператор устанавливает его таким образом, чтобы оцениваемый вектор оказался параллельным этим линиям, а затем считывает показания по делениям, нанесенным по окружности экрана.
Точность оценки зависит от длины вектора и его расстояния до ближайшей из параллельных линий. Чем больше длина и короче расстояние, тем точнее оценивается направление. В процессе тренировки формируется навык оценки направления, важным компонентом которого является система контрольных глазомерных действий.
Способы кодирования информации
В абстрактных СОИ информация об управляемых объектах поступает к оператору в закодированном виде. Термин «кодирование» взят из теории информации. Он обозначает преобразование сообщения в сигнал, удобный для передачи по каналу связи. Применительно к деятельности оператора (передаче информации человеку) кодированием называется способ представления информации с помощью условных символов. Оптимальные является такой способ кодирования, который обеспечивает максимальную скорость и надежность приема информации человеком.
Задача оптимального кодирования заключается прежде всего в правильном выборе категории кода, длины алфавита сигналов, уровня кодирования, доминирующего признака, а также в рациональной компоновке сигналов в группы.
Категория кода определяется способом кодирования информации. Помимо них используются также такие способы, как кодирование яркостью, цветом, частотой мельканий, размерами и т. д.
Выбор категории кода зависит от характера решаемой оператором задачи. При использовании пяти способов кодирования (рис. 9.8) для решения различных задач (опознание, определение места сигнала, счет, сравнение и проверка) по данным работы в задаче опознания наибольшую эффективность обеспечивает категория цвета, а между категориями чисел, букв и форм нет существенных различий. В задаче поиска наиболее эффективными являются категории цвета и числа.
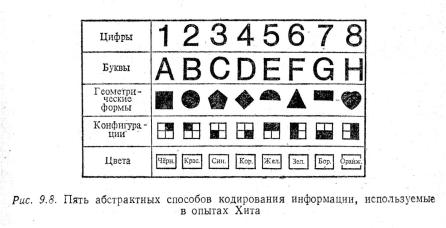
Выбор категории кода должен производиться также с учетом особенностей оперативной памяти человека, роль которой особенно существенна на этапе декодирования сигналов. При минимальной нагрузке на память различия в эффективности различных способов кодирования незначительны. При большой нагрузке на оперативную память, наоборот, различия в эффективности кодирования проявляются наиболее четко. Наиболее эффективным в этих условиях являются цифровой и буквенный коды, которые облегчают образование оперативных единиц памяти.
Выбор категории кода зависит также от особенностей объекта, о котором передается информация оператору. Как уже указывалось, в большинстве случае скорость в точность различения и опознания будет тем выше, чем более похож отображаемый символ на реальный объект.
Однако требование внешнего подобия отображаемого символа и реального объекта может быть выполнено не во всех случаях. Так, например, если различные объекты незначительно отличаются друг от друга по своей форме, то лучшие результаты дает кодирование их с помощью абстрактных символов (например, геометрических фигур).
При выборе категории кода необходимо учитывать и привычные ассоциации человека, его жизненный и профессиональный опыт. Так, например, размеры отображаемого символа хорошо ассоциируются с размерами реального объекта и его важностью (значением). То же самое относится и к яркости символа: ее величина также хорошо ассоциируется с размерами и значением объекта. Пространственная ориентация символа может использоваться для отображения направления движения. Для привлечения внимания оператора целесообразно использовать кодирование различной частотой мелькания изображения. Привычные ассоциации сложились у человека по отношению к различным цветам: красный цвет обычно ассоциируется с опасностью, желтый – с необходимостью получения какого-либо предупреждения, зеленый – со спокойной обстановкой и т. п. Буквы лучше всего использовать для передачи информации о назначении объекта, цифры – для информации о его количественных характеристиках. Геометрические фигуры-знаки могут быть использованы для кодирования информации в тех случаях, когда оператору необходима наглядная картина для быстрой переработки поступившей информации.
И, наконец, выбирая ту или иную категорию кода, необходимо обеспечить различие зрительных сигналов по своим физическим параметрам. Для этого в допустимых пределах должны быть величины яркости, контраста, угловых размеров зрительных сигналов, а также характеристики их цветности. Требование оптимальной различимости сигналов ограничивает возможную длину их алфавита.
Длиной алфавита сигналов называется возможное количество различных элементов (их свойств) внутри данной категории кодирования. Оптимальные условия различения сигналов создаются лишь в том случае, если различие между парой одномерных стимулов превышает пороговую величину в несколько раз. Кроме того, допустимая длина алфавита символов определяется и возможностями оперативной памяти человека. Поэтому число абсолютно различимых градаций одномерного сигнала колеблется в пределах 4–16 в зависимости от выбранной категории кодирования. Исключение составляет лишь буквенно-цифровое кодирование, при котором могут использоваться практически все цифры и буквы из известных оператору алфавитов (например, русского, латинского, греческого и др.), а также кодирование формой символов по их ассоциации (подобию) с реальными объектами.
Длина алфавита сигналов может быть увеличена за счет выбора соответствующего уровня кодирования. Так, например, она может быть увеличена в несколько раз использованием многомерных стимулов. При этом параметры объекта кодируются в одном знаке объединением нескольких признаков. Допустимая длина алфавита сигналов возрастает. Например, в системах со знаковой индикацией таким доминирующим признаком является контур знака. В частности, при исследовании восприятия цифровой информации установлено, что наиболее часто ошибки возникают при опознании цифр, включающих кривые линии. Для уменьшения ошибок разработан ряд шрифтов, в которых для начертания всех цифр используются только прямолинейные элементы (рис. 9.9).
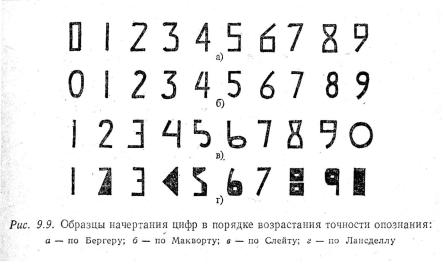 .
.
Рис. 9.9. Образцы начертания цифр в порядке возрастания точности опознания:
а – по Бергеру; б – по Макворту; в – по Слейту; г – по Лансделлу
На эффективность кодирования влияет также компоновка кодового знака. Кодовые знаки должны быть хорошо различимы. При построении многомерных кодов следует учитывать то обстоятельство, что в затрудненных условиях восприятия одни признаки кодового знака могут маскировать другие. Это требование важно учитывать при построении систем кодирования, составленных из условных знаков, имеющих контур и некоторое количество внутренних и наружных деталей для кодирования дополнительных признаков объекта. Поэтому при разработке систем кодирования важно установить число опознавательных признаков знака, определяющих степень его сложности, и оценить их влияние на точность и скорость опознания.
Скорость и точность восприятия снижаются при увеличении степени сложности знаков (табл. 9.2). При опознании наблюдается несколько иная картина: наилучшими по показателям точности и скорости опознания оказываются не простые, а средние по сложности знаки (табл. 9.3). Кроме того, преимущество средних по сложности знаков обнаруживается также в показателях точности и длительности сохранения их в памяти.
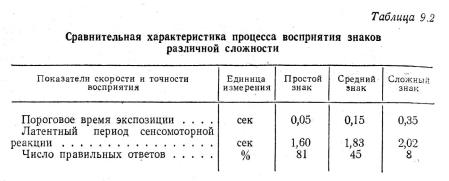
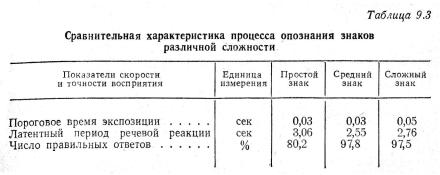
Выделение первичных признаков, которые выступают как различительные. Опознание заученных знаков не определяется только степенью их сложности. Оно строится иначе; чем восприятие, и идет по линии объединения ряда различительных признаков в целостные комплексы. Благодаря этому сокращается время приема информации. Опознаний включает момент выбора того или иного знака из заученного алфавита. В этих условиях решающим фактором оказывается не сама по себе геометрическая сложность знака, а ее отношение к информационному содержанию знака, определяемому длиной алфавита. Простые знаки в рассматриваемых экспериментах не имели достаточного числа опознавательных признаков, которые позволяли бы точно и быстро относить их к той или иной категории («выбор из алфавита»), поэтому опознание оказывалось неполным. Сложные знаки, напротив, имели лишние опознавательные признаки, что также затрудняло их отнесение к определенной категории. Испытуемые часто приписывали этим знака «лишнее» содержание.
В системах со знаковой индикацией информация о каждом из объектов очень часто передается с помощью набора знаков (формуляров). Формуляром называется компактная таблица различных знаков, каждый из которых несет информацию о том или ином параметре управляемого объекта (рис. 9.10).
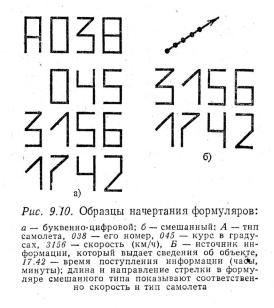
Инженерно-психологические требования к акустическим индикаторам
Большая часть информации (около 90%) поступает к оператору в виде зрительно воспринимаемых сигналов. Однако в некоторых случаях более целесообразным является применение для передачи информации оператору акустических сигналов. Звуковые индикаторы целесообразно применять в следующих случаях:
если информация, подлежащая обработке, простая, краткая и требует немедленной реакции;
если применение визуальной индикации ограничивается информационной перегрузкой оператора или условиями его работы (низкая или очень большая освещенность, необходимость постоянного перемещения оператора, вуализирующее действие примесей, находящихся в воздухе: дым, туман, водяные пары и т. п.);
если нужно предупредить оператора о поступлении последующего сигнала;
если необходима иди желательна голосовая связь.
Более подробные рекомендаций по использованию зрительной и слуховой формы предъявления информации приведены в табл. 9.4.
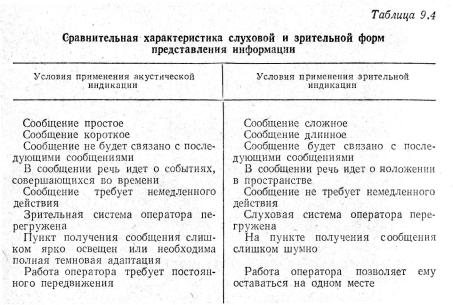
Акустические сигналы могут передаваться или в форме определенных звуков, являющихся кодом, или в речевой форме. Звуковые сигналы имеют предпочтение перед речевыми в тех случаях, когда: сообщение крайне простое; оператор специально натренирован понимать смысл закодированных сигналов; сигнал обозначает момент времени, который не имеет абсолютного значения; сообщение требует немедленного действия; условия работы (шум) неблагоприятны для получения речевых сообщений; речевое сообщение будет маскировать другую речь или мешать другим операторам, для которых данное сообщение не предназначено.
Звуковые сигналы служат для предупреждения оператора о грозящей опасности, для настораживания его и настраивания на возможность перехода системы или оборудования в критическое состояние, для напоминания о необходимости предпринять какие-либо действия, для привлечения внимания оператора. Некоторые рекомендации по проектированию звуковых устройств для сигналов тревоги и предупреждения приведены в табл. 9.5.
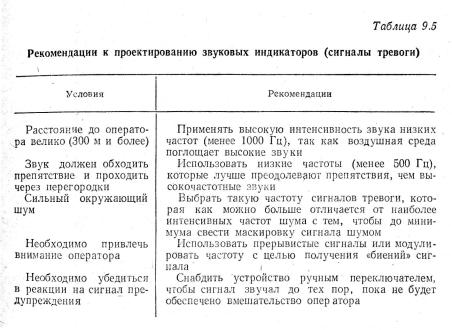
Источниками звуковых сигналов могут быть: гудки, сирены, свистки, колокола, зуммеры, генераторы звуковых колебаний.
Речевые сигналы имеют предпочтение перед звуковыми в случаях, когда: сообщение сложное; необходимо иметь возможность опознать источник сообщения; слушатель (оператор) специально не натренирован понимать значение закодированных сигналов; необходим быстрый двусторонний обмен информацией; сообщение относится к будущему времени и требует подготовительных операций; возможны ситуации большой психической напряженности, в которых нельзя поручиться за точность и своевременность декодирования сигналов оператором.
Речевые сигналы часто используются в качестве сигналов предупреждения. Такой способ, наиболее эффективен в условиях большой загрузки зрительного анализатора.
Так, например, в системе управления энергоблоком с целью разгрузки зрительного анализатора оператора часть информации предъявляется ему в виде речевых сигналов (табл. 9.6). Это позволило снять со зрительного и перенести на слуховой канал около 30% всей представляемой информации.
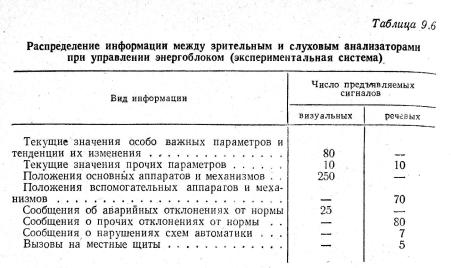
Принятая при управлении энергоблоком структура речевых сообщений позволяла не изменять существительные по падежам и соответственно синтезировать необходимые сообщения из слов, а не из отдельных фонем. Выделены слова и устойчивые словосочетания, необходимые для формирования сообщений (около 180), определена частота появления различных слов в сообщении и средняя длина сообщения (3–4 слова), а также число одновременно появляющихся сообщений (не более 10). Для синтеза таких сообщений может быть использован магнитный барабан с аналоговой записью на 40–50 дорожках.
Основные требования к сигналам, формируемым синтезаторами речи, заключаются в следующем. Уровень речевых сигналов должен быть на 10–20 дБ выше уровня помех в месте расположения оператора, принимающего этот сигнал. Голос, используемый для записи речевых сигналов, должен быть хорошо различимым. Сообщения целесообразно произносить беспристрастным и спокойным голосом. Слова в сообщении должны быть, разборчивыми, соответствующими смыслу ситуации и краткими.
Построение систем отображения информации
В современных СЧМ возникает, как правило, необходимость отображения довольно больших объемов информации. Поэтому возникает задача на основе общих инженерно-психологических требований к отображению информации и частных требований к отдельным видам зрительной и акустической индикации, рационально разработать системы отображения информации. В качестве отдельных их составляющих, используются обычно рассмотренные выше элементы зрительной и акустической индикации.
Разработка системы отображения информации (синтез информационной модели объекта управления) включает определение: какую информацию (или информацию о чем) выдавать человеку и в какой форме (или в каком виде) это лучше всего делать.
В более развернутом плане решение этих задач заключается в следующем:
Психологический анализ деятельности оператора в СЧМ и определение информации, необходимой ему для выполнения заданных функций.
Согласование интенсивности потока сигналов с реальной производительностью оператора с целью достижения наивысшей эффективности системы путем подбора специального алгоритма работы информационной системы.
Выбор конкретных типов отдельных средств отображения информации по существующей классификации.
Составление инженерно-психологических требований к системе отображения информации в целом и ее отдельным элементам.
Композиционное и цветовое решение системы отображения информации.
Оценка и сравнение полученных вариантов на основе объективных критериев.
Работа по решению всех перечисленных задач создания систем отображения включает в себя несколько фаз, последовательно протекающих во времени.
На первой, начальной фазе, выполняется следующая работа:
анализ процессов управления, определение целей, назначения и условий работы системы «человек – машина»;
построение оптимальной иерархической структуры оперативного и диспетчерского управления;
анализ функций, границ и связей той ступени иерархической системы управления, для которой разрабатывается данная система отображения информации.
Следующая фаза разработки системы отображения информации носит организационный характер. Основной задачей этой фазы является планирование всей последующей работы. Поэтому здесь прорабатываются такие вопросы, как распределение функций между человеком и автоматическими устройствами, составление перечня функций информационной системы, выбор показателей и критериев оценки эффективности СЧМ. Выбранные показатели должны быть двух видов: общие показатели эффективности СЧМ с учетом всей совокупности выявленных факторов и частные показатели оценки оптимальности вариантов СОИ как одного из важнейших факторов.
Целью третьей фазы является разработка технического задания на конструирование системы отображения информации. Здесь производится:
подробное описание функций оператора, способов и последовательности решения им задач, определение требований к скорости и точности действия оператора;
выбор наиболее представительной информации, необходимой оператору для эффективного выполнения своих функций;
составление алгоритмов переработки информации оператором;
анализ потока сигналов при различных режимах работы СЧМ и согласование его интенсивности с реальной пропускной способностью человека-оператора;
распределение сигналов по их важности, частоте появления, принадлежности к различным элементам СЧМ;
выбор принципа действия информационной системы и порядка подачи сигналов на СОИ;
выбор конкретных средств отображения информации.
Одним из основных методов расчета характеристик на этой фазе является построение моделей деятельности оператора с использованием аппарата теории массового обслуживания (ТМ-модели) и теории информации (ТИ-модели).
Применение. ТИ-моделей определяется условием адекватного описания потоков информации, принимаемых оператором. Это возможно прежде всего в том случае, если удается ввести категорию ценности информации. Один из возможных путей заключается в разделении оперативных задач на классы по трудности их решения. Для каждого класса определенным образом задаются вероятности поступления отдельных сигналов. Это делается с таким расчетом, чтобы для каждого более высокого класса распределение вероятностей больше отличалось от равновероятного. Например, нарастающая сложность задач может характеризоваться ростом показателя степени аргумента на единицу при переходе из класса в класс.
Необходимым условием применения ТМ-моделей является возможность описания поступающей к оператору информации в терминах входящего потока заявок. Категория ценности выражается в этом случае посредством введения приоритетов. Оба класса моделей находят широкое применение в практике инженерно-психологического проектирования СОИ; в настоящее время трудно отдать какое-либо предпочтение тому или иному виду моделей.
Четвертой фазой работ по созданию СОИ является разработка технического проекта. Здесь решается целый ряд новых задач, таких, как разработка общей структуры СОИ и ее функциональных компонентов, составление алгоритма работы информационной системы, выбор способа кодирования информации и составление алфавита знаков, выбор отдельных характеристик индикационных элементов, составление спецификации комплектующих элементов, художественно-композиционное и цветовое решение СОИ.
Последней, пятой фазой создания СОИ является разработка и испытание опытных образцов различных вариантов СОИ. Опытные образцы бывают различных типов, однако все их можно разделить на две группы: лабораторные и промышленные.
Данная фаза включает в себя последовательное решение следующих задач:
создание макетов СОИ, в том числе действующих;
уточнение внешних условий работы оператора (освещение, микроклимат, шумовой фон);
проведение экспериментальных исследований с целью сравнительной оценки эффективности действий оператора с различными вариантами СОИ, при этом особенно важно точно смоделировать в лаборатории реальную деятельность оператора;
составление перечня требований к профессиональным и личностным качествам операторов, создание инструкций по отбору, обучению и работе операторов;
уточнение проектных решений (при необходимости некоторые из ранее рассмотренных пунктов повторяются).
Если рассмотреть весь процесс создания СОИ, то нетрудно заметить, что он может быть разделен как бы на два уровня в соответствии с масштабом вопросов, решаемых на том или ином этапе. Верхний уровень включает более крупные, общие вопросы, такие, как определение общих требований к системе «человек – машина», разделение функций между оператором и техническими устройствами, согласование потока сигналов с реальной производительностью оператора, поиск возможных вариантов СОИ, удовлетворяющих требованиям системы, выбор экспериментальных методик и аналитического аппарата.
На нижнем уровне решаются более частные вопросы, связанные с конкретизацией выбранных ранее принципиальных положений, осуществляется разработка конструкции СОИ, макетирование, изготовление образцов.
Проектирование органов управления
Классификация и общие инженерно-психологические требования к органам управления
С помощью органов управления оператор в системе «человек – машина» осуществляет исполнительные (управляющие) воздействия. Типы органов управления, их количество и способы взаимного размещения следует выбирать с учетом особенностей движений человека, характера его функций в системе «человек – машина», последовательности и степени важности операций, требуемой точности и скорости работы.
Проектирование органов управления имеет своей конечной целью обеспечение человеку возможности быстрого нахождения необходимого органа управления и выполнения требуемого действия с заданной точностью и в пределах допустимого времени. При решении этой задачи должны быть учтены также возможные конструктивные и технические ограничения. К их числу относятся размеры рабочей зоны (в некоторых случаях она может быть ограниченной, например в шахте, космическом корабле, самолете), возможные схемные решения аппаратуры, факторы внешней среды (например, во взрывоопасных помещениях недопустимо использование тех органов управления, при срабатывании которых образуется искрение, даже если они и являются предпочтительными по инженерно-психологическим или экономическим соображениям). Иными словами, при проектировании органов управления в системе «человек – машина» необходимо обеспечить единое выполнение технических и инженерно-психологических требований.
Органы управления в системе «человек – машина» используются для решения следующих задач: ввода командной (цифровой и логической) информации, установки требуемых режимов работы аппаратуры, регулировки различных параметров, вызова информации для контроля и т. п. Для решения этих задач используются различные типы органов управления, которые могут быть классифицированы по ряду признаков (рис. 10.1).
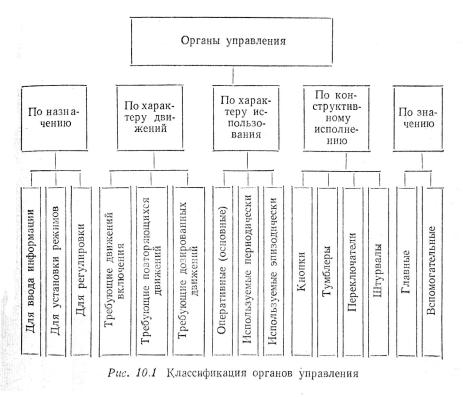
По характеру выполняемых человеком движений различают:
Органы управления, требующие движений включения, выключения или переключения (нажатие кнопки, перемещение рычага, поворот ручки). Движения в этом случае простые, хотя двигательный акт складывается из довольно значительного количества микродвижений пальцев.
Органы управления, требующие повторяющихся движений: вращательных, нажимных, ударных (печатание перфокарт, работа на пишущей машинке или телеграфном аппарате, передача и кодирование информации). Значительную роль здесь играет темп движений; например, установлено, что максимальный темп вращения для ведущей руки составляет 4,83 оборота в секунду, для неведущей – 4,0 оборота в секунду. У опытных машинисток и телеграфистов можно заметить увеличенный темп работы за счет того, что они частично предугадывают сигналы.
Органы управления, требующие точных дозированных движений, например, для настройки и нацеленной установки параметров. Движения при этом дозируются по силовым, пространственным и временным параметрам.
По характеру перемещения органы управления могут быть линейными, вращающимися или смешанными. В зависимости от характерных движений рук органы управления разделяются на: требующие только движения пальцев; пальцев и кисти; пальцев, кисти и предплечья; пальцев, кисти, предплечья и плеча; пальцев, кисти, предплечья, плеча и плечевого сустава.
По назначению и характеру использования оператором органы управления разделяются на следующие группы:
оперативные (основные), используемые постоянно, для программного управления, установки режимов работы, длительного регулирования параметров системы, ввода управляющей и командной информации; используемые периодически (обычно это вспомогательные органы управления для включения и выключения аппаратуры, периодического контроля ее работоспособности и выполнения других операций, не требующих высокой скорости управляющих воздействий);
используемые эпизодически, связанные с настройкой, калибровкой основной аппаратуры и регулировкой работы вспомогательного оборудования, регламентными работами, подключением к индикаторам датчиков измеряемых параметров и выполнением других эпизодических операций.
И, наконец, по конструктивному исполнению органы управления распределяются на целый ряд подгрупп: кнопки, тумблеры, рукоятки, селекторные переключатели, педали и т. п.
Приведенная классификация необходима для проведения сравнительной оценки различных видов органов управления, выбора из них наиболее предпочтительных для того или иного вида деятельности, выработки общих требований к данному типу органов управления.
Независимо от типа и характера применяемых органов управления при их выборе и проектировании необходимо учитывать целый ряд общих инженерно-психологических требований. Основными из них являются следующие.
Расположение органов управления должно осуществляться с учетом принципа экономии движений. Это означает, что их количество и траектории должны быть сведены до минимума; сами движения должны быть простыми и ритмичными; каждое движение должно заканчиваться в положении, удобном для начала следующего движения; предыдущие и последующие движения должны быть плавно связаны; работу, выполняемую оператором, по возможности следует распределить между обеими руками.
Последовательные регулировки органов управления должны быть взаимосвязаны так, чтобы одно движение легко переходило в другое, причем последовательные регулировки, выполняемые быстро, одна за другой, должны иметь одинаковые направления движения. Характер движений при регулировке и управлении техникой должен быть однотипен в пределах аппаратуры, обслуживаемой одним оператором, а сами регулировки и управляющие действия должны выполняться минимальным количеством движений.
При размещении органов управления следует учитывать зоны досягаемости рук человека. Оперативные, т. е. наиболее важные и часто используемые, органы управления необходимо размещать в пределах оптимальной зоны, которая обеспечивает быстрые, точные и наименее утомительные движения. При большом количестве органов управления и невозможности размещения их в пределах оптимальной зоны допускается расположение оперативных органов управления в пределах допустимой зоны досягаемости.
Вспомогательные органы управления могут размещаться в пределах допустимой или даже максимальной зоны досягаемости. Эпизодически используемые органы управления могут размещаться и за пределами зон досягаемости или быть скрыты под лицевой или боковой панелью пульта управления, но при условии обеспечения в случае необходимости легкого доступа к ним. Исключение составляют те случаи, когда вспомогательные органы управления связаны с индикатором, расположенным в рабочей зоне оператора. В этом случае они должны быть перенесены в зону допустимой досягаемости.
Например, некоторые органы управления телевизионными приемниками (размер кадра, частота кадров и строк) расположены на задней стенке телевизора. По своему назначению эти органы управления являются регулировочными, поэтому при работе с ними необходимо видеть результат регулировки на экране телевизора. Однако сделать это затруднительно, поскольку экран и органы управления расположены на противоположных сторонах телевизора. В данном случае размещение регулировочных органов управления за пределами зоны досягаемости, хотя включение в работу их осуществляется лишь эпизодически, является нецелесообразным.
При установке органов управления необходимо учитывать привычные для человека стереотипы движений. Положениям «Пуск», «Включено», «Увеличение», «Подъем», «Открытие» или движениям «Вперед», «Вправо», «Вверх» должны соответствовать перемещения рычагов вверх, от себя; вправо, повороты маховичков или ручек по часовой стрелке, а для кнопок – нажатие верхних, передних или правых кнопок. Для органов ножного управления установлены следующие соответствия: при нажатии педали – «Включено», «Увеличение»; при отпускании педали – «Выключено», «Уменьшение».
В целом же перемещения органов управления, которые отвечают «естественным» движениям оператора, более эффективны и менее утомительны, чем перемещения, которые кажутся ему неудобными или трудными. Перемещения органов управления должны быть по возможности короткими, согласованными с требованиями точности и ощущением положения органа.
Органы управления должны обладать достаточным сопротивлением, чтобы уменьшать возможность случайного включения их под тяжестью руки или ноги. Кроме того, важно иметь в виду, что ощущение усилия человеком важно для регулирования его движений. Для органов управления, требующих единичного приложения усилия или непрерывного приложения усилия в течение коротких периодов, рациональным максимальным сопротивлением является половина наибольшего усилия, развиваемого оператором. При этом необходимо иметь в виду следующее. Когда сидящий оператор должен прикладывать к органу управления силу, большую 2,3 кГ, необходимо обеспечивать для него соответствующую опору, например спинку при движении органа управления «от себя» и подножку для движения «на себя».
При необходимости установки органа управления в строго заданное положение (точная регулировка) необходимо обеспечить поддержку для работающей руки, например, при работе с органами управления, приводимыми в действие рукой, обеспечить опору для руки или на кресле либо, если это возможно, на самой приборной доске.
При проектировании органов управления следует предусмотреть меры по исключению случайного или несвоевременного срабатывания тех органов, которые связаны с возможностью возникновения аварийной ситуации. Такие органы управления должны обеспечиваться блокировкой или сигнализацией (световой или звуковой), включаемой при запрещении работы с ними.
Возможность случайного или несвоевременного включения можно также устранить:
применением дополнительных органов управления, используемых до, одновременно или после манипулирования с органом управления, подлежащим блокировке;
расположением органов управления на одном уровне с панелью или ниже ее уровня;
установкой защитных крышек, планок, скобок и т. п., закрывающих органы управления или фиксирующих их в одном положении.
Для облегчения управления, уменьшения ошибок и времени поиска органа управления можно использовать различные методы их кодирования. Одним из наиболее употребительных способов является кодирование с помощью пояснительных надписей.
Надпись указывает назначение органа управления и дает информацию о регулируемом параметре. Надпись может выполняться или на самом органе управления, или непосредственно примыкать к нему. Надпись должна быть короткой и содержать только общепринятые сокращения. Специальные термины могут применяться только в том случае, когда они известны всем операторам. Абстрактные символы, требующие специальной тренировки, использовать не рекомендуется. Допустимы общепринятые символы типа +, – и т. п.,
В качестве дополнительных способов может использоваться кодирование органов управления формой и цветом. Кодирование формой наиболее целесообразно применять в том случае, когда оператор не имеет возможности визуально различать различные органы управления, а должен действовать, опираясь только на осязательный контроль. В качестве примера на рис. 10.3

Цвет как метод кодирования органов управления наиболее эффективен в сочетании с другими методами. С помощью цвета удобно производить группирование однотипных органов управления в случае их большого количества на пульте оператора. Кроме того, с помощью цвета выделяются органы управления, выполняющие разнотипные функции. Так, например, зеленый цвет используется для включающих органов управления, красный – для отключающих.
Органы управления могут приводиться в движение с помощью рук или ног оператора. Ручное управление предпочтительнее перед ножным, когда требуется высокая точность и скорость установки органа управления в определенное положение и нет необходимости в непрерывном или продолжительном приложении большого усилия (9 кГ и более). Ножное управление применяется обычно для разгрузки рук и экономии времени при большом количестве органов управления, небольшой точности регулировки и необходимости больших мышечных усилий.
Инженерно-психологические требования к отдельным типам органов управления
Для ввода информации оператором используются различные типы органов управления, каждый из которых предназначен для выполнения определенных функций. Некоторые рекомендации по выбору органов управления приводятся в табл. 10.1
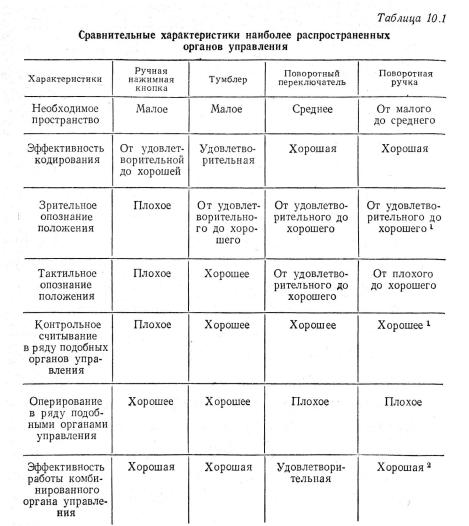
К каждому типу органов управления предъявляются специфические инженерно-психологические требования. Рассмотрим их более подробно.
Кнопки и клавиши используются для ввода логической и цифровой информации и быстрого включения или отключения аппаратуры.
Оптимальное расположение кнопок должно быть на уровне локтя сидящего оператора так, чтобы рука была согнута в локтевом суставе на 90°, а предплечье лежало горизонтально. При коротких и одиночных нажимах на кнопку для повышения быстроты реагирования на сигнал следует размещать кнопку несколько приподнято над столом, чтобы угол между кистью и плоскостью стола составлял 30–45°.
При проектировании кнопочных пультов следует учитывать данные, приведенные в табл. 10.2.
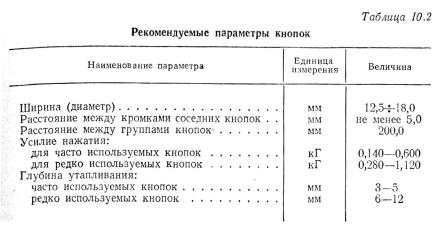
Форма кнопок должна учитывать анатомическое строение пальцев руки человека. С этой точки зрения наиболее удобны, особенно при частом применении, кнопки четырехугольной формы с закругленными углами или закругленной верхней кромкой. Редко используемые кнопки могут быть круглыми. Для улучшения фиксации пальца на кнопке должна быть выполнена неглубокая насечка или выемка.
Конструктивное оформление кнопок должно предусматривать также экономию места на панели управления. Разрабатывая конструкцию кнопочного переключателя, желательно предусмотреть возможность замены кнопок, их различные варианты набора при установке на панели управления (вертикально или горизонтально) в зависимости от логики решения задачи и удобства работы оператора. Возможность случайного включения нескольких кнопок при нажатии одной должна быть сведена к минимуму. Вертикальное размещение ряда кнопок предпочтительнее горизонтального.
С целью облегчения работы оператора и повышения ее эффективности кнопки, клавиши и другие органы управления следует группировать по функциональным признакам. При этом целесообразно цветовое кодирование для выделения в группы кнопок, имеющих какие-либо функциональные особенности. Кнопки и клавиши по группам располагают обычно в виде горизонтальных и вертикальных рядов.
Оптимальный угол наклона клавиатуры кнопочного пульта равен 15°. Кнопки обычно располагаются правильными рядами, в каждом не более двадцати кнопок. Необходимо также логическое группирование кнопок на пульте управления.
В случае если действия оператора, связанные с работой на кнопочном пульте, можно разбить на операции и подоперации, применяется логическое группирование, когда операции осуществляются с помощью клавиш, а подоперации – с помощью кнопок. Если клавиша располагается горизонтально, то логически связанные с ней кнопки размещаются под ней; если клавиша располагается вертикально, то справа от нее.
В порядке последовательности операций клавиши или кнопки должны располагаться слева направо или сверху вниз.
При ярко выраженном хроматическом освещении (одним цветом) количество цветов кнопок должно быть максимально сокращено, и в этом случае кодирование цветом целесообразнее заменять кодированием формой. Кнопка «Пуск» должна быть белой, зеленой, а «Стоп» – красной, причем яркость красного цвета должна быть максимальной в данных условиях. Окрашивать кнопки не рекомендуется, лучше делать цветными наполнители (если кнопка из пластмасс).
Тумблеры применяются для реализации функций, требующих двух дискретных положений, а также в случае крайне ограниченного места. При групповой установке тумблеров их рекомендуется располагать горизонтальными, а не вертикальными (как кнопка) рядами. Это обеспечивает меньшее количество ошибок при выборе нужного тумблера. Плоскость движения тумблера должна совпадать с плоскостью направления взора. Расстояние между соседними тумблерами должно быть не менее 20мм, при одновременном действии несколькими пальцами – не менее 36мм.
При проектировании тумблеров следует учитывать данные, приведенные в табл. 10.3.

Величина сопротивления усилию зависит от длины плеча тумблера. Так, например, при длине до 30мм сопротивление составляет 0,3 – 0,5кГ. В этом случае тумблер управляется пальцами кисти, При длине 50мм сопротивление достигает 1,0кГ, управление осуществляется всей рукой.
Тумблеры, предназначенные для выполнения важных функций, снабжаются стопором или крышкой с таким расчетом, чтобы для их включения оператор должен был сделать по крайней мере два движения, Желательно, чтобы переключение сопровождалось щелчком.
Поворотные ручки применяются для плавной или ступенчатой регулировки и некоторых операций переключения при незначительных усилиях (до 5кГ). При необходимости различать положение немного оборотной ручки на ней предусматривают указатель или метку. При проектировании поворотных ручек необходимо учитывать данные, приведенные в табл. 10.4.
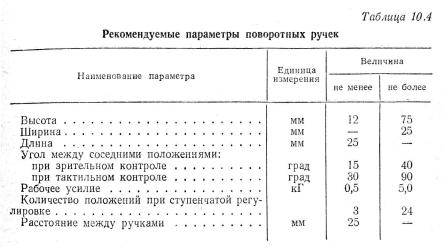
Ручки, используемые для точного регулирования, должны иметь такой коэффициент передачи, чтобы они поворачивались на угол не более 60 - 80° в области предполагаемого точного значения регулируемого параметра. Если имеется необходимость выделить нулевое положение ручки, то при прохождении через него оператор должен ощущать увеличение усилия, прикладываемого к ручке, но не более чем на 10% от основного усилия.
Для осуществления возможности безошибочного распознавания ручек по одному прикосновению (тактильное распознавание) необходимо, чтобы формы рукояток различались между собой.
Вращающиеся селекторные переключатели следует применять для дискретного переключения, когда нужно получить три и более фиксированных положения. Основные размеры их те же, что и у поворотных ручек (табл. 10.4).
Селекторные переключатели снабжаются движущейся стрелкой и неподвижной шкалой. Стрелку желательно помещать достаточно близко к шкале, чтобы свести к минимуму параллакс между стрелкой и отметками шкалы. Для ручек селекторных переключателей, расположенных слева от оператора и управляемых левой рукой, деления на шкале и подписи размещаются сверху и справа от переключателя. Для ручек, расположенных справа от оператора и управляемых правой рукой, деления на шкале и подписи размещаются сверху и слева от переключателя.
При выборе конструкции селекторного переключателя необходимо учитывать следующие условия:
в начале и конце диапазона изменения позиций необходимо предусмотреть стопоры (концевые упоры), выдерживающие вращающиеся моменты до 25 кГ/см;
для предотвращения остановки переключателя между позициями необходимо, чтобы упругое сопротивление при переключении сначала нарастало, а по мере приближения к фиксатору падало; упругое сопротивление фиксатора должно составлять 1 - 6 кГ/см;
в условиях достаточного освещения расстояние между соседними фиксаторами, которыми снабжены позиции переключателя, должно быть не менее 15°; в условиях плохого освещения эта величина должна быть увеличена до 30°.
Маховики (штурвалы) применяются при необходимости медленного вращения (до 10 об/мин) и точного поворота на определенную часть окружности или там, где сила, необходимая для переключения, настолько велика, что не допускает применения поворотной ручки, управляемой одной рукой. При проектировании маховиков необходимо учитывать данные, приведенные в табл. 10.5.
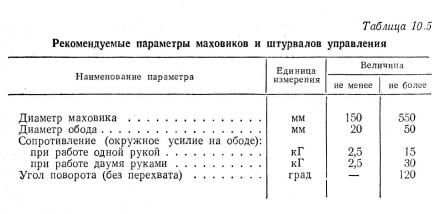
Центр маховика должен быть расположен приблизительно на высоте локтя. Это составляет примерно 230см от поверхности сидения при рабочей позе сидя и 900 - 1050 см от пола при рабочей позе стоя. Маховик (штурвал) должен иметь наклон около 45° в вертикальной плоскости. При необходимости получения информации о произведенной операции управления маховик снабжается указателем, градуированным лимбом или счетчиком оборотов. Поверхность обода маховика должна быть тщательно обработана и не иметь острых ребер.
Ножные органы управления (педали) применяются в тех случаях, когда требуются большие усилия при небольшой точности и необходимо сократить общее время управления, облегчив, при этом мускульную силу рук. Возможные конструктивные схемы педалей и рекомендуемые при этом величины усилий показаны на рис. 10.4.

Педали целесообразно размещать ближе к продольной оси тела оператора. Отклонение от продольной оси не должно превышать 100мм, расстояние между педалями для обеих ног рекомендуется 200 - 450мм. Ширина педалей должна соответствовать ширине ступни, иметь рифленую поверхность и закраину для предотвращения соскальзывания ноги.
Совместное расположение индикаторов и органов управления
Обычно органы управления используются совместно со связанными с ними индикаторами. В этом случае для обеспечения наилучшей точности и скорости работы оператора необходимо обеспечить выполнение не только инженерно-психологических требований к отдельным индикаторам и органам управления, но также и ряда требований к их совместному расположению. Вкратце эти требования сводятся к следующему.
При размещении органов управления рядом с теми средствами отображения информации, к которым они относятся, необходимо, чтобы рука оператора при манипулировании органом управления не закрывала индикационную часть соответствующего средства отображения информации. Для выполнения этого требования нужно, чтобы орган управления, манипулирование которым осуществляется правой рукой, размещался правее и ниже связанного с ним индикатора. Если же работа с органом управления осуществляется левой рукой, то он должен размещаться левее или ниже соответствующего ему индикатора.
При размещении органов управления и связанных с ними индикаторов на различных панелях относительное размещение элементов на обеих панелях должно быть идентичным. Для этого индикаторы и связанные с ними по смыслу органы управления целесообразно размещать в одинаковом порядке и в непосредственной близости друг от друга. Ручки органов управления рекомендуется устанавливать в плоскости экрана индикатора либо в плоскости, ей параллельной. При взаимном размещении органов управления и соответствующих им индикаторов следует подчеркивать их функциональное назначение с помощью цветной маркировки и путем придания им специфических очертаний.
Направление перемещения органа управления должно правильно сочетаться с изменением показаний соответствующего индикатора. При этом:
уменьшается время реакции или время на принятие решений;
увеличивается правильность начальных перемещений органа управления (т. е. сокращаются движения в ложном направлении, вызванные реверсивными ошибками);
увеличивается скорость и точность регулирования органом управления;
уменьшается время на обучение операторов.
Можно указать некоторые основные правила взаимной связи между движением указателя индикатора и ручки управления:
вращающийся орган управления нельзя располагать выше индикатора;
если стрелка индикатора перемещается по дуге, большей 180°; надо использовать вращающуюся ручку (рис 10,5а);
при перемещении указателя по дуге, составляющей меньше 180°, можно применять линейные органы управления (рис 10,5б);
направление перемещения указателя индикатора должно соответствовать направлению движения органа управления.

Последнее положение носит название правила «реализма» в движениях органов управления. Согласно этому правилу, наиболее высокая эффективность достигается при манипулировании теми органами управления, движения которых согласованы по пространственным и временным характеристикам с сигналами.
Помимо этого для повышения эффективности работы оператора большое значение имеет согласование индикаторов и органов управления по положению. Это особенно важно для тех видов деятельности, в которых требуется незамедлительная ответная реакция оператора на поступивший сигнал (например, при загорании лампочки нужно немедленно нажать на кнопку). В этом случае при применении панели, на которой кнопки управления размещены в непосредственной близости от сигнальных лампочек, темп работы оператора в 2 – 4 раза выше, чем при использовании панелей, где сигнальные лампочки расположены отдельно от кнопок.
Следовательно, наилучшим вариантом взаимоотношения индикаторов и органов управления является такой, при котором информация используется там, где она возникает, т. е. место приложения сигнала совпадает (или находится рядом) с местом его появления, Оптимальным случаем является совмещение индикатора и органа управления в одном устройстве. Примером такого конструктивного, решения может служить люминесцентный индикатор, являющийся одновременно кнопкой или клавишей (рис.10.6). На основе подобных устройств могут быть созданы новые типы мнемосхем и табло состояний, совмещенных с панелями управления.

В более сложных случаях, когда важно не только время решения задачи, но и количество допущенных ошибок, правило совмещения индикаторов и органов управления по положению не следует понимать так упрощенно, как в случаях, описанных выше. Покажем это на таком примере.
В лабораторных условиях моделировалась деятельность железнодорожного диспетчера. Испытуемый должен был «набирать» маршрут, манипулируя тумблерами. Исследовалось три варианта сочетаний табло, на котором отображалась схема железнодорожных путей, и пульта управления. В первом варианте пульт был отделен от табло, а тумблеры на нем располагались в ряд; во втором пульт тоже был отделен от табло, но расположение тумблеров точно воспроизводило расположение стрелок на табло; в третьем тумблеры располагались непосредственно под стрелками (т. е. пульт управления и табло были совмещены). Испытуемым предлагались различные задачи по переводу «поезда» из одного пункта в другой.
Результаты опыта показали, что среднее время решения задачи в третьем случае наименьшее. Однако количество ошибок здесь было самым большим. Лучшие результаты в целом были получены для второго варианта.
На основании этих и аналогичных им опытов может быть сформулировано следующее общее правило: важнейшим средством повышения точности и скорости действий оператора является структурное соответствие (а не просто близость, что справедливо лишь для частных случаев) в расположении сигналов и органов управления. Это приближает управляющее действие к предметному, обеспечивая тем самым оптимальные условия его регуляции.
Для повышения точности и скорости действий оператора большое значение имеет также правильное расположение индикаторов и органов управления в зоне деятельности оператора. Расположение этих элементов может проводиться с использованием следующих принципов:
функционального соответствия;
объединения;
совмещения стимула и реакции;
последовательности действий;
важности и частоты использования.
Принцип функционального соответствия требует, чтобы каждой подсистеме СЧМ соответствовала блок-панель (подсистема) пульта управления. Этот принцип наиболее легко выполняется в том случае, если подсистемы СЧМ независимы или хотя бы слабо связаны друг с другом. В этом случае общая оптимизация компоновки пульта управления будет обеспечена оптимизацией компоновки каждой из блок-панелей (рис 10,7 а). Допустим, СЧМ состоит из шести независимых подсистем, которые условно названы как системы питания, пуска, АПР, ДУ, УД, АС. Тогда органы управления и индикаторы каждой из этих подсистем могут быть расположены в пределах самостоятельной блок-панели пульта управления.
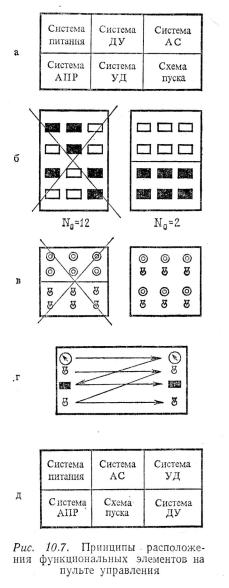
В более общем случае может оказаться целесообразным пойти на некоторое нарушение этого принципа в пользу остальных. В частности, это возможно, если последовательное обслуживание сменяется операциями управления всеми подсистемами одновременно (например, при взлете и посадке самолета).
Принцип объединения требует использования суперэлементов, под которыми понимается множество однотипных элементов контроля или управления, принимающих одно и то же состояние на некотором отрезке времени и объединенных в одну группу (рис 10,7б). Применение этого принципа способствует значительному уменьшению количества информации, поступающей к человеку-оператору.
Принцип совмещения стимула и реакции требует пространственного соотнесения (в частном случае сближения) элементов управления и индикации. Подробно он уже был рассмотрен раньше. Заметим лишь, что удовлетворение этому принципу (10,7 в) уменьшает число альтернатив, определяющих поток информации. Пусть, например, имеется N элементов индикации (стимулы) и такое же число органов управления (реакции), расположенных неупорядоченно. Выбор одного из индикаторов дает Н = log2N единиц информации, столько же информации будет получено при нахождении нужного органа управления. Если же каждый орган управления как-то соотнести со своим индикатором, то двойственный выбор из множества элементов заменяется одинарным. Получаемое оператором количество информации сокращается в два раза.
Согласно принципу последовательности действий, элементы пульта управления следует размещать в некоторой последовательности, соответствующей алгоритму управления системой. Обычно эта последовательность соответствует стереотипу чтения книги – слева направо и сверху вниз. Удовлетворение этому принципу значительно устраняет неопределенность выбора нужного элемента, т, е. также способствует уменьшению количества поступающей к оператору информации.
Последний принцип предусматривает размещение наиболее часто используемых и важных индикаторов и органов управления в удобном для оператора месте. Этим обеспечивается снижение его утомления и повышается производительность труда. Так, например, если подсистемы АС и пуска участвуют в работе СЧМ чаще, чем другие подсистемы, то их индикаторы и органы управления следует расположить в центральной части пульта управления.
Рассмотренные принципы размещения индикаторов и органов управления могут противоречить друг другу, поэтому в каждом конкретном случае проектирования пульта управления нужно находить некоторый разумный компромисс. В первую очередь должен учитываться принцип, не вступающий в противоречия с другими принципами. Если СЧМ легко делится на ряд подсистем, практически не связанных между собой, то первыми удовлетворяются требования принципа функционального соответствия.
Когда оператор почти непрерывно управляет системой, степень автоматизации которой незначительна, то удовлетворяются не противоречащие друг другу принципы последовательности действия и совмещения стимула и реакции, а другие принципы подчиняются этим двум. Для случая же полной автоматизации системы, когда оператору необходимо, главным образом, следить за ее состоянием, на первый план после принципа функционального соответствия выдвигается принцип объединения. Пульты управления транспортными средствами конструируются с учетом принципа важности и частоты использования (руль управления, органы торможения и управления двигателем, переключатели находятся в наиболее удобном месте).
Организация ручного ввода информации оператором
Человек-оператор, работающий за пультом современной сложной СЧМ, связан с необходимостью ввода большого количества информации. Поэтому весьма актуальной является задача рациональной организации работы оператора по вводу необходимой информации. В настоящее время известны следующие способы ввода информации:
с помощью разделительной (однофункциональной) клавиатуры;
с помощью многопальцевой или аккордной (многофункциональной) клавиатуры;
программный способ.
В большинстве случаев оператор в настоящее время осуществляет связь с аппаратурой с помощью первого способа. При этом каждый знак формируемого сообщения вводится с помощью специально предназначенного для него органа управления (кнопки, клавиши, тумблеры). Число элементов такой клавиатуры определяется алфавитом знаков, которым пользуется оператор. В современных СЧМ (в частности, АСУ) этот алфавит достаточно обширен и может достигать нескольких сотен знаков. Большое количество кнопок управления приводит к увеличению размеров пульта управления, что затрудняет во многих случаях расположение их в зонах оптимальной досягаемости рук оператора. Помимо этого для многих СЧМ размеры пультов управления ограничены по условиям их применения.
Обращение со сложными многокнопочными панелями приводит к снижению производительности труда операторов. Это обусловлено следующими причинами:
С увеличением размеров клавиатуры трудность осуществления рабочих движений связана функционально с их амплитудой. Значительное число кнопок, входящих в раздельную клавиатуру, не позволяет организовать ее пространство таким образом, чтобы для достижения любой нужной кнопки оператор совершал движения с малой амплитудой, что неизбежно приводит к заметному увеличению времени ввода информации.
В основе организации раздельных клавиатур с большим числом кнопок лежит принцип пространственного кодирования. Отсутствие смыслового кодирования значительно усложняет поиск требуемой кнопки при большом числе однотипных устройств, какими являются кнопки. Конечно, некоторые меры, такие, как кодирование цветом кнопок, относящихся к одной знаковой или смысловой группе, и некоторая логика построения группы, облегчают поиск и уменьшают время, но это является лишь частичным улучшением.
Эффективность выполнения функций управления, возлагаемых на оператора, в значительной мере зависит от способов, скорости и точности произвольной регуляции человеком его рабочих движений, воздействующих на органы управления. Увеличение как времени движения, так и времени поиска определяет значительные временные затраты на ввод информации. Однако цикл поступления данных должен ограничиваться временем 1,2–2,5 сек, так как уже временный интервал в 3 сек достаточно велик для того, чтобы оператор частично забыл, что он хотел запросить или ввести.
Для устранения перечисленных трудностей может быть предложено устройство ввода, использующее многопальцевые или аккордные (многофункциональные) клавиатуры. Здесь предполагается, что с помощью небольшого числа кнопок путем их возможного комбинирования можно ввести значительное число сообщений. Однако характер деятельности оператора с такого рода клавиатурами требует серьезной подготовки и систематической тренировки. Исключается возможность оперативно воспользоваться такой клавиатурой неподготовленным оператором.
Для повышения скорости работы оператора за пультом управления, а также для исключения неправильного формирования сообщений может использоваться так называемый программный способ ввода информации, отличающийся тем, что вводимая с пульта информация делится на ассоциативные группы.
На панели управления устанавливается лишь одна клавиатура, состоящая из n кнопок, где n равно максимальному числу элементов в группе. В зависимости от вида формируемого сообщения по заранее составленным программам осуществляется автоматическая коммутация клавиатуры с соответствующими разрядами входного регистра формирователя сообщений. При этом содержание транспарантов над кнопками клавиатуры также изменяется по программам.
Таким образом, единственность клавиатуры на пульте управления и небольшое число кнопок облегчают осуществление оператором рабочих движений. После того как выбран вид сообщения, снимается необходимость поиска нужной группы кнопок, так как подключение групп осуществляется по программам автоматически, что исключает ошибки и уменьшает время ввода информации оператором. Наличие одной лишь клавиатуры позволяет разместить ее в зоне оптимальной досягаемости, что также является положительным для работы оператора.
Структурная схема пульта управления, реализующего способ программного ввода информации, представлена на рис. 10.6. Рассмотрим работу этой схемы.
В исходном состоянии на транспарантах обозначений кнопок отображаются виды сообщений. Выбрав вид сообщения и нажав соответствующую кнопку на клавиатуре, оператор осуществляет выбор режима работы программного устройства. Последнее по заданной программе через распределитель управляет кодосдвигателем, который подключает шифратор к соответствующим разрядам входного регистра формирователя сообщений, а также управляет через дешифратор изменением содержания отображаемой информации на транспарантах обозначений кнопок. Режим работы программного устройства асинхронный и определяется темпом работы оператора на клавиатуре. Контроль за формированием сообщений производится с помощью контрольного табло, где отображается информация, набираемая оператором на клавиатуре.
Работа программного устройства завершается коммутацией шифратора к регистру служебных команд. В этом случае нажатием одной из кнопок осуществляется выдача команды на передачу сформированного сообщения. При этом программное устройство и содержание транспарантов приводятся в исходное состояние.
Основными преимуществами данного способа являются: значительное уменьшение габаритов пульта управления, повышение точности и скорости ввода сообщений, упрощение работы оператора за пультом, что ведет к сокращению периода обучения операторов, уменьшению утомляемости при работе, снижению вероятности неправильного формирования сообщений.
При реализации любого из способов ввода информации весьма важным является вопрос обеспечения высокой надежности работы оператора. Существенным способом повышения надежности является самоконтроль (контроль оператором его собственных действий). В итоге проведения операции самоконтроля может иметь место либо определенное рассогласование между полученным и требуемым результатами деятельности, либо отсутствие его, что будет свидетельствовать о достижении цели. Независимо от исхода операции самоконтроля сигнал с ее выхода поступает в анализирующие звенья центральной нервной системы. Именно в них вырабатывается последующая стратегия управления.
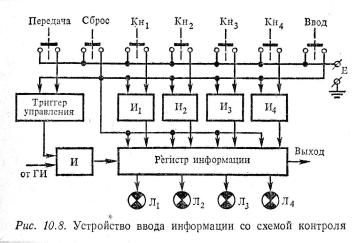
Для осуществления возможности самоконтроля оператором своих действий устройства ввода информации снабжаются специальными схемами контроля (см. рис. 10.8).
Организация рабочего места оператора
Общие требования к организации рабочего места
Под рабочим местом оператора понимается зона его трудовой деятельности в системе «человек – машина», оснащенная техническими средствами и вспомогательным оборудованием, необходимым для осуществления функций контроля и управления производственным процессом.
Правильная организация условий труда предполагает рациональную планировку оборудования и размещение постоянного рабочего места персонала с учетом психофизиологических характеристик и антропометрических данных, обеспечение безопасности работы и нормальных окружающих условий. К этому кругу вопросов относятся также решение компоновки средств отображения информации и органов управления на щитах, пультах и других конструкциях, организация рабочей позы оператора, а также общее оформление помещения операторского пункта с учетом эстетических требований. Конечной целью организации рабочего места является оптимизация условий трудовой деятельности, обеспечивающих максимальную надежность и эффективность работы оператора (коллектива операторов).
При организации рабочего места должны быть соблюдены следующие основные условия:
достаточное рабочее пространство для оператора, позволяющее осуществлять все необходимые движения и перемещения при эксплуатации и техническом обслуживании оборудования;
достаточные информационные связи между оператором и оборудованием, а также между операторами;
оптимальное размещение рабочих мест в помещениях для оперативной работы, а также безопасные и достаточные проходы для операторов;
оптимальное размещение оборудования, входящего в состав рабочего места, главным образом средств отображения информации и органов управления;
необходимое естественное и искусственное освещение для выполнения оперативных задач, технического обслуживания или тренировок;
допустимый уровень акустического шума, вибраций и других факторов производственной среды, создаваемых оборудованием рабочего места или другими источниками;
наличие необходимых инструкций и предупредительных знаков, предостерегающих об опасностях, которые могут возникнуть при работе, и указывающих на необходимые меры предосторожности;
надежная индикация отказов электрического питания аппаратуры, а также индикация отказов самой аппаратуры как и ее функционирования.
При конструировании и размещении рабочих мест следует предусматривать меры, предупреждающие или снижающие преждевременное утомление оператора, предотвращающие возникновение у него психофизиологического стресса, а также появление ошибочных действий.
Конструкция рабочего места должна обеспечивать быстроту, безотказность, простоту и экономичность технического обслуживания и ремонта в нормальных и аварийных условиях; полностью отвечают функциональным требованиям и предполагаемым условиям эксплуатации.
В зависимости от основных функций, выполняемых оператором с помощью средств индикации и управления, рабочие места можно классифицировать следующим образом:
рабочее место оперативного управления, предназначенное для решения задач управления, выдачи команд и распоряжений и т. п.;
информационно-справочное рабочее место, которое служит для запроса и получения справок о состоянии системы в целом или ее отдельных звеньев, а также для формирования, передачи и приема символической или графической информации;
рабочее место ручного ввода информации, необходимое для оперативного ввода символической или графической информации;
рабочее место функционально-технологического контроля, обеспечивающее оперативный функциональный контроль за исправностью технических средств и каналов связи;
рабочее место программиста ЭВМ, которое служит для его связи с вычислительной машиной, а также для отладки машинных программ;
комбинированное рабочее место, обеспечивающее совместное выполнение оператором нескольких функций.
Построение пультов управления
Основу рабочего места оператора любого типа составляет пульт управления. Он должен обеспечивать удобное и достаточное по размерам рабочее пространство для операторов, свободный подход их к пульту, рациональное размещение на пульте средств связи, место для ведения записей, просмотра и хранения текущей документации. Кроме того, пульт управления должен быть снабжен специальным сиденьем, обеспечивающим поддержание удобной, ненапряженной рабочей позы оператора.
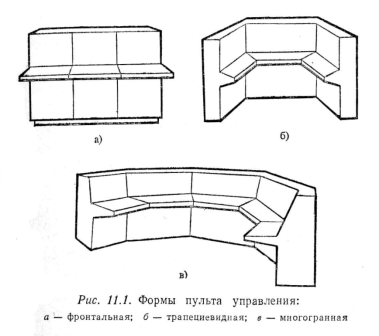
Рис 11.1. Формы пульта управления:
а – фронтальная; б – трапециевидная; в – многогранная
К основным инженерно-психологическим характеристикам пульта управления относятся его форма и геометрические размеры.
На практике применяются следующие формы пультов (рис 11.1)
фронтальная, применяемая в том случае, если оказывается возможным все органы управления разместить в пределах зон максимальной и допустимой досягаемости, а индикаторы - в пределах зоны центрального и периферического зрения;
трапециевидная, используемая в тех случаях, когда органы управления и индикации невозможно разместить на пульте фронтальной формы; в этом случае органы управления и индикаторы частично размещаются на боковых панелях, развернутых относительно фронтальной под углом 9-120°;
многогранная или полукруглая, которая применяется при наличии большого числа средств отображения информации и органов управления; боковые панели рекомендуется располагать таким образом, чтобы они были перпендикулярны линии взора оператора.
Минимальный диаметр полукруглого пульта, предназначенного для одного оператора, должен быть 1200 мм.
Геометрические размеры пульта управления устанавливаются исходя из антропометрических характеристик того контингента операторов, которым предстоит работать за данным пультом. Антропометрические характеристики представляют собой различные размеры человеческого тела, наиболее важные из них приведены на рис. 11.2 и в табл. 11.1.

Многочисленными исследованиями установлено, что различные антропометрические характеристики подчинены нормальным законам распределения с математическими ожиданиями Mi и среднеквадратическими отклонениями σi, показанными в табл. 11.1.

Например, орган управления, расположенный в верхней части пульта (для работы стоя) на высоте, соответствующей средней арифметической от пола до запястной кости поднятой кверху руки (позиция 2 на рис. 11.2, М2 = 205 см), для 50% операторов будет неудобен при эксплуатации. Если же этот орган управления разместить ил высоте 190 см (М2 – 2σ2), то его достанет 95%, а на высоте 182 см (М2– 3σ2) – 99% операторов. В практике проектирования пультов управления обычно не берется более Мi±2σi так как дальнейшее расширение границ нецелесообразно с экономической точки зрения.
Во всех расчетах, где оператор должен что-то доставать, до чего-то дотягиваться, следует исходить из минимальных антропометрических характеристик. В других случаях в качестве расчетных необходимо брать максимальные величины (Мi±2σi). Поэтому минимальными табличными данными необходимо пользоваться при определении зон досягаемости, а максимальными – при определении размеров кресла, высоты ниши для ног и т. п. Средние размеры должны использоваться при определении центра лицевой панели пульта управления, зон размещения индикаторов и органов управления.
Примеры конструктивного исполнения пультов управления с учетом рассмотренных антропометрических характеристик приведены на рис. 11.3, 11.4 и 11.5.
Пульты управления, изображенные на рис. 11.3 и 11.4, используются в тех случаях, когда оператор должен иметь возможность обзора пространства, расположенного за пультом управления например, табло или мнемосхему, расположенную отдельно от пульта). Пульт управления (рис. 11.5) целесообразно применять в тех случаях, когда число наблюдаемых оператором индикаторов невелико и все они могут быть размещены на его лицевой панели.
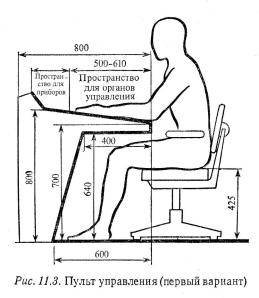

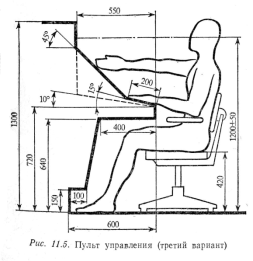
При использовании приведенных в табл. 11.1 антропометрических характеристик необходимо иметь в виду, что эти характеристики представляют собой результаты измерения обнаженного тела. Поэтому фактические размеры должны быть увеличены на высоту каблука (30 мм) и толщину одежды (60 мм).
При проектировании пультов управления следует учитывать ряд специфических инженерно-психологических принципов. Одним из них является принцип активного оператора, идея которого состоит в том, что оператору следует поручать функции, требующие активной деятельности, а не пассивного ожидания «происшествий». Этот принцип реализован, например, при разработке рабочего места оператора в АСУ «Цемент-1»(рис. 11.6).
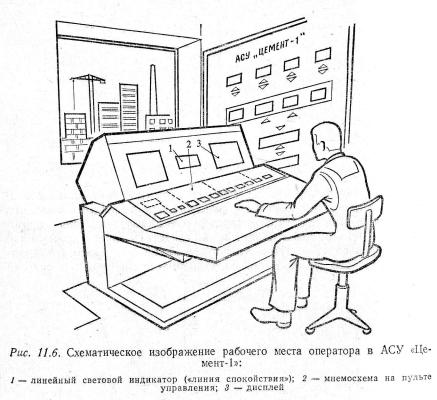
Общая оценка оператором состояния участков цементного производства облегчается наличием специального линейного светового индикатора («линия спокойствия»), расположенного над мнемосхемой на пульте. Зеленый цвет линии свидетельствует нормальной работе производства. Изменение цвета какой-либо секции индикатора с зеленого на красный сигнализирует о нарушении режима на участке производства, мнемосхема которого соответствует этой секции «линия спокойствия». Этим самым в АСУ «Цемент-1» реализована так называемая система спорадического контроля, предложенная профессором Д. И. Агейкиным. Такая система контроля позволяет оператору при отсутствии сигналов о нарушении режима выборочно проверять состояние различных параметров, наблюдать тенденции их изменения и скорость приближения к границам допустимых значений. Тем самым в АСУ «Цемент-1» реализован принцип активного оператора.
При проектировании пульта управления должен быть реализован также принцип его специализации. Это означает, что пульт должен создаваться как средство деятельности оператора и лишь после того, как будут определены его задачи в СЧМ. Пульт же с заранее заданными свойствами (речь идет не о форме и размерах пульта, а о его «содержании») не может способствовать качественному решению задач оператором. Поэтому глубоко ошибочными являются попытки стандартизации пультов с точки зрения выполняемых с их помощью задач. Принцип построения пульта для каждого конкретного вида деятельности должен быть сугубо индивидуальным, он должен создаваться именно для реализации данной деятельности.
Проектируя пульт управления, необходимо добиться устранения дискомфортной блесткости. Дискомфорт создается высокой яркостью искусственного света, а также бликами и отблесками, возникающими при отражении световых потоков зеркально отражающими поверхностями, попадающими в поле зрения оператора.
Выполнение рассмотренных требований и принципов построения пультов управления позволяет обеспечить оптимальные условия проявления психических и физиологических функций человека-оператора, именно при этих условиях достигается его наивысшая работоспособность.
Оптимальная зона условий труда
Важным вопросом, возникающим при организации рабочего места оператора, является определение оптимальных условий для протекания трудовой деятельности. Соблюдение этих условий способствует лучшему протеканию психологических и физиологических функций. Основные признаки оптимума (оптимальной зоны) заключаются в следующем.
Первый признак оптимальной зоны – наиболее высокого проявления функции работающей системы (двигательной, сенсорной и др.), например наибольшая точность различения, наибольшая скорость реакции и т. д.
Второй признак – длительное сохранение работоспособности системы, т. е. выносливость. При этом имеется в виду функционирование на высшем уровне. Так, если определяется, например, темп подачи информации оператору, то можно обнаружить, что при очень низком или слишком высоком темпе длительность сохранения работоспособности у человека сравнительно невелика. Но можно найти и такой темп передачи информации человеку, при котором он будет продуктивно работать в течение длительного времени.
Третий признак состоит в том, что для оптимальных условий работы характерен наиболее короткий (по сравнению с другими) период врабатываемости, т. е. период перехода включаемой в работу системы человека от состояния покоя к состоянию высокой работоспособности.
Четвертый признак – наибольшая стабильность проявления функции, т. е. наименьшая вариативность результатов работы системы. Так, человек может наиболее точно по амплитуде или времени многократно воспроизводить то или иное движение при работе в оптимальном темпе. С отступлением от этого темпа вариативность движений возрастает.
Пятый признак – соответствие реакций работающей системы человека внешним воздействиям. Если условия, в которых находится система, не оптимальны, то ее реакции могут не соответствовать воздействиям (например, сильный сигнал вызывает слабую, т. е. парадоксальную, реакцию, и наоборот). При оптимальных же условиях система проявляет высокую приспособительность и вместе с тем устойчивость, благодаря чему ее реакции в любой данный момент оказываются соответствующими условиям.
Шестой признак заключается в том, что при оптимальных условиях наблюдается наибольшая согласованность (например, синхронность) в работе компонентов системы.
Конкретные величины, характеризующие признаки оптимальных условий для тех или иных функций, зависят от тренированности операторов, их возрастных, типологических и индивидуальных особенностей. Однако в любом случае создание оптимальных условий обеспечивается правильной организацией рабочего места оператора. Немаловажное значение при этом имеет выбор правильного, физиологически обоснованного для данного вида деятельности рабочего положения (позы).
Рабочая поза определяется условиями трудового процесса. При ее выборе необходимо учитывать: характер работы, размеры рабочей зоны, величину требуемого рабочего усилия (статического и динамического), точность выполняемой операции, объем и темп выполняемых движений. Рекомендуемые параметры табл. 11.3 позволяют выбрать рабочую позу в зависимости от основных условий трудового процесса.
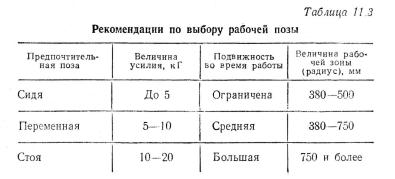
Положение сидя имеет следующие преимущества перед положением стоя. Оператор может выполнить легкую работу руками и тяжелую работу ногами значительно дольше, когда он сидит, чем когда он стоит. При положении сидя тело оператора лучше защищено от воздействий вибраций, толчков, качки, а его руки более свободны для оперирования органами управления. Когда работа оператора связана с перемещением рабочего места или воздействием ускорения, телу оператора необходима определенная поддержка. Это хорошо обеспечивается при положении сидя.
В положении сидя оператор может работать обеими ногами одновременно, диапазон операций управления для каждой ноги шире, чем в положении стоя. Работа сидя менее утомляет человека, требует меньшего статического напряжения (т. е. напряжения неподвижных мышц) за счет создания опоры позвоночному столбу и тазу. Считается, что при прочих равных условиях поза сидя требует примерно на 10% меньше расхода энергии, чем поза стоя.
Положение сидя может стать наилучшим в работе только в том случае, если рабочая зона будет правильно сконструирована. При проектировании рабочих мест следует учесть высоту, ширину, глубину рабочей поверхности (рис. 11.7), предусмотреть место для локтей оператора; пространство для ног должно позволять вытягивать ноги во всю длину. Высота зоны работы руками (рис. 11.7, а) должна быть выбрана с таким расчетом, чтобы оператор мог удобно видеть, при необходимости опираться на подлокотники и не был вынужден принимать при работе неудобную рабочую позу. Нижняя часть оборудования должна иметь такую конструкцию, чтобы оператор мог свободно сидеть (рис. 11.7, б) и не был вынужден поджимать ноги или сидеть неудобно на сиденье.
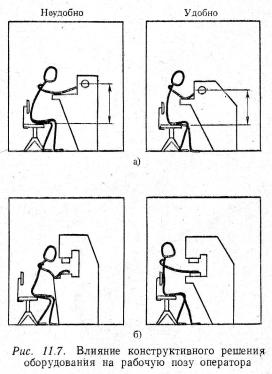
Работа оператора за пультом управления в положении сидя обусловливает в ряде случаев уменьшение активных движений, связанных с сокращением и расслаблением мышц (динамическая нагрузка), в связи с чем появляются (хотя и реже, чем в положении стоя) рабочие ситуации, при которых возникает необходимость сохранения мышечного напряжения при неподвижной мышце. Это способствует возникновению статических нагрузок, которые чаще всего наблюдаются в мышцах ног, спины и плечевого пояса.
При статических нагрузках нарушается кровообращение в самой мышце, что резко снижает возможности восстановления ее энергетических ресурсов. Уменьшения статических нагрузок можно добиться за счет выбора наиболее экономного в энергетическом отношении движения, а также за счет уменьшения прикладываемого к органу управления усилия, применения специальных площадок для опоры (подлокотников, ступенек и т. д.).
Важным элементом рабочего места при работе в положении сидя является кресло оператора. Исходя из условий создания максимальной работоспособности, рабочие сиденья операторов должны удовлетворять следующим основным требованиям:
обеспечивать свободное перемещение корпуса и конечностей относительно друг друга в процессе работы;
служить надежной опорой позвоночному столбу и тазу при сохранении их естественного положения;
обеспечивать свободное перемещение сиденья относительно рабочей поверхности с возможностью его фиксации;
иметь ряд регулируемых параметров (высота сиденья, угол наклона спинки, ее высота);
в случае обширной рабочей зоны обеспечивать вращение сиденья.
Этим требованиям наиболее полно удовлетворяют конструкции рабочих кресел, разработанных во Всесоюзном научно-исследовательском институте технической эстетики (рис. 11.8).
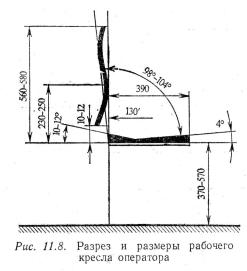
Для некоторых видов операторской деятельности более предпочтительной может оказаться рабочая поза стоя. Краткая характеристика ее сводится к следующему.
Положение стоя обеспечивает большую подвижность. Совершая один шаг (или более) в желательном направлении, оператор может наблюдать за индикаторами и оперировать органами управления, которые недоступны для него в стационарном сидячем положении.
Это положение позволяет оператору совершать управляющие движения с большим усилием и размахом, например перемещения больших рычагов или ручных штурвалов. Рабочая поза стоя имеет практическое преимущество, когда оператор должен перемещать орган управления с большим усилием и на большое расстояние. Рабочее положение стоя особо целесообразно, когда оператор должен свободно передвигаться и когда не предусмотрено специальное пространство для ног.
Уменьшение неблагоприятного воздействия на человека фиксированной рабочей позы (сидя или стоя) может быть достигнуто применением переменной рабочей позы. Конструкция рабочего места, позволяющая оператору сидеть или стоять, дает ему возможность изменять позу по желанию, что уменьшает мышечную усталость.
Проектирование рабочего места должно быть основано на удовлетворении требованиям видимости, достаточной зоны ручного действия и зоны действия педалей в более ограниченном из двух рабочих положений – в сидячем положении, ограничивающем поле зрения и зону ручного действия, и в стоячем положении, ограничивающем зону действия педалей.
Интерьер оперативного пункта управления
Решение задачи организации рабочего места оператора должно пролиться совместно с проектированием внутреннего пространства (интерьера) всего пункта управления. Интерьеры пунктов оперативного управления создаются архитектурными формами и отделкой, цветовым решением и системой освещения, учитывающими особенности работы операторов; устанавливаемыми в пунктах управления техническими средствами и мебелью. Все элементы интерьера должны гармонично сочетаться и преследовать цель оптимизации условий труда операторов.
Внутреннее пространство пункта управления делится обычно на три зоны: рабочую, вспомогательную и отдыха.
Главной функциональной зоной является рабочая. Она ограничивается комплексом функциональных элементов рабочего места оператора. В этой зоне устанавливается пульт с аппаратурой управления, приборами вызова основных технологических параметров, аппаратурой связи с управляемыми объектами; информационные щиты и панели (табло, мнемосхемы, устройства визуальной и звуковой сигнализации и т. п.); различные регистрирующие приборы. Хорошим планировочным решением рабочей зоны является такое, При котором все информационные панели располагаются вдоль одной из стен помещения, а место оператора в плане находится в вершине угла а (не более 90°), образованного линиями, идущими от крайних точек панели. Это обусловлено тем, что при рассмотрении показаний приборов сбоку допустимый угол обзора составляет 45° к нормали панели; при больших углах получаются значительные искажения (рис. 11.9). При необходимости размещения приборов в зоне, превышающей 90°, информационные панели могут размещаться так, как показано на рис. 11.9, б. Возможное планировочное решение рабочей зоны пункта управления, на котором работают несколько операторов, показано на рис. 11.9, в. Размер и площадь рабочей зоны зависят от общей протяженности информационных панелей и щитов, выполняемых с учетом инженерно-психологических требований (допустимый обзор, оптимальная дистанция наблюдения и т. п.).
Вспомогательная зона необходима для обслуживания оперативных щитов и панелей информации. В ней могут быть расположены также блоки неоперативной информации. Вспомогательная зона охватывает пространство, непосредственно прилегающее к обратной стороне оперативных щитов и панелей и необходимое для работ по наладке и контролю приборов и аппаратуры. Площадь этой зоны определяется требованиями технологии и с учетом проходов, обеспечивающих удобный подход к обратной стороне оперативных щитов, обслуживание установленных на щите приборов и других элементов.
Зона отдыха предназначена для психологической переадаптации оператора в процессе кратковременного отдыха и должна располагаться внутри пункта управления таким образом, чтобы из нее можно было наблюдать за появлением сигналов на мнемосхеме, оперативных щитах и пультах управления

Из этого назначения вытекает двойственный характер зоны отдыха. Во-первых, она обеспечивает кратковременный отдых персонала пункта управления. Для этого она оборудуется функциональной мебелью, форма и стиль которой коренным образом отличаются от рациональной формы элементов рабочей зоны. Во-вторых, уменьшение психофизиологического напряжения, возникающее у оператора в процессе трудовой деятельности, уменьшение зрительного и нервного утомления и повышение тем самым эффективности его труда. В связи с этим композиция зоны отдыха должна быть построена принципиально на другой основе, чем композиция рабочей зоны. Вид их контраста зависит от характера работы оператора. При более спокойной работе (обеспечивается автоматическое управление) контраст между этими зонами также может быть спокойным. Если же у оператора режим работы напряженный и времени для кратковременного отдыха остаётся мало, контраст должен быть более резким.
Важными элементами зоны отдыха в любом случае являются живые уголки природы, связывающие персонал пункта управления с внешним пространством, обеспечивающие более близкий контакт с природой и способствующие более интенсивному отдыху нервной системы и зрительного анализатора (рис. 11,10).

Для возможности размещения и установки основного (рабочего) вспомогательного оборудования в соответствии с рациональной планировкой, для устранения образования теней, предотвращения скопления пыли и обеспечения легкости уборки, а также в соответствии с требованием создания наиболее красивого общего вида помещения его потолок и стены должны быть гладкими, без выступающих строительных конструкций. Полы пункта управления рекомендуется настилать материалами светлого цвета, так как они отражают свет, что весьма важно при напряженной зрительной работе. Полы рекомендуется выполнять в одной цветовой гамме с цветом стен. Пример интерьера операторского помещения, выполненного в соответствии с рассмотренными рекомендациями, приведен на рис. 11.11.
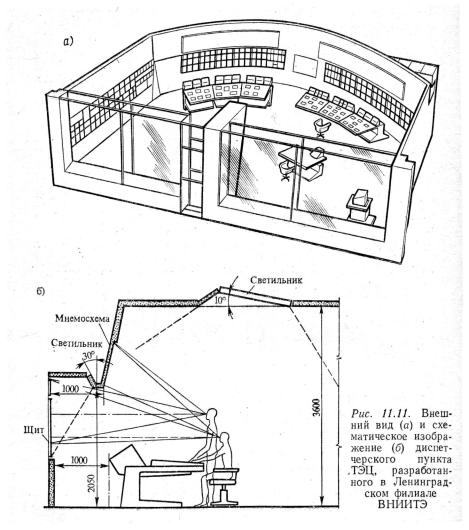
При создании цвето-световой среды в интерьере учитывают эмоционально-физиологическое воздействие цвета и света и их функционально-эстетическую роль в организации пространства. Не останавливаясь подробно на этом вопросе, отметим лишь основные требования, которыми следует руководствоваться при проектировании интерьера пункта управления.
На рабочих местах предусматривается общее и местное освещение; уровень освещенности на всех рабочих поверхностях, наблюдаемых оператором, должен быть не менее 300 лк с коэффициентом неравномерности не более 0,5.
Для борьбы с монотонностью работы оператора в помещении пункта управления желательно предусмотреть динамическое (изменяющееся во времени) освещение. Для этого светильники общего и местного освещения должны иметь плавную (ручную или автоматическую) регулировку силы света, обеспечивающую возможность снижения освещенности рабочих поверхностей до 30 лк.
Размещение светильников должно исключать возможность засветки экранов электроннолучевых трубок, светящихся планшетов и Других индикаторов, работающих по принципу обратного контраста. Поэтому светильники по возможности следует прятать в углубления потолка, стремясь использовать отраженный рассеянный свет. С их помощью нередко решается и композиция потолка. В случае подвесных светильников их снабжают колпаками, рассеивающими свет и защищающими глаза оператора от прямого попадания света. При этом нужно стремиться к извлечению максимума декоративного эффекта.
В согласовании конструктивных особенностей рабочих мест с характеристиками человека важную роль играет техническая эстетика. Художественная форма технических объектов является продуктом совместной работы инженера, психолога и художника. Выразительными средствами технической эстетики являются: художественная форма, функциональный цвет и свет, пространственная композиция.
Этими средствами можно повлиять на деятельность оператора и повысить ее эффективность, выявить функции тех или иных элементов аппаратуры, привлечь к ним внимание оператора, облегчить операции приема и переработки информации, улучшить концентрацию и переключение внимания, повысить скорость восприятия и экономичность управляющих действий, улучшить их пластику координацию, нейтрализовать ощущение жары или холода, снять монотонность или напряженность работы. Организация рабочего места оператора с учетом описанных требований способствует повышению эффективности его работы, а значит, и всей системы «человек – машина».
Принцип проектирования систем «человек-машина»
Возникновение и структура инженерно-психологического проектирования
История развития техники в зависимости от способа учета человеческого фактора при проектировании, взглядов на место человека в проектируемой системе знает два различных подхода к проектированию.
Первый подход связан с развитием традиционного технического проектирования. Оно заключается в разработке отдельно взятых изолированных технических устройств без учета их взаимной связи. Стыковка, взаимное согласование этих устройств осуществляется только на этапе испытаний или же при их эксплуатации. Особенности работы человека учитываются в ходе проектирования лишь интуитивно, специальных научно обоснованных принципов и методов учета человеческого фактора при проектировании не существовало. Такой подход был возможен, пока техника была сравнительно проста и не представляла сколько-нибудь серьезных требований к управляющему и обслуживающему персоналу. Хронологически в явной форме он существовал до середины 40-х годов.
На смену ему пришел новый подход, связанный с системотехническим проектированием. При этом подходе объектом проектирования являются не отдельные устройства, а единая техническая система с учетом всех взаимосвязей и взаимного влияния отдельных устройств друг на друга. Особенностью системотехнического проектирования является то, что в нем специально был поставлен вопрос об учете человеческого фактора. Объектом проектирования при системотехническом подходе является не просто техническая система, а единый комплекс «человек – машина». Человек рассматривается как одна из неотъемлемых составных частей этого комплекса, а при его создании проектируется не только работа технических устройств, но и деятельность человека.
Другими словами, на основании всех достижений науки, техники и практики решается проблема взаимодействия человека и техники с целью повышения эффективности единой системы «человек – машина».
Проектирование системы при таком подходе состоит из трех основных частей: технического, художественного и инженерно-психологического. Техническое проектирование заключается в разработке технической части системы, оно охарактеризовано выше. Художественное проектирование необходимо для обеспечения требуемых потребительских свойств системы: красоты, привлекательности и др. Оно предполагает учет свойств эмоционально-мотивационной сферы человека, создание у него определенного эстетического отношения к продукту проектирования.
Инженерно-психологическое проектирование (ИПП) заключается в решении всех вопросов, связанных с включением человека в проектируемую систему. Одной из его основных задач является создание проекта деятельности человека аналогично тому, как задачей технического проектирования является создание проекта технической части системы. Однако только этим не ограничиваются задачи ИПП. Кроме создания проекта деятельности человека в его задачи входят согласование, стыковка технического и «человеческого» проектов и создание на основе этого обобщенного проекта системы «человек – машина».
Необходимо особо подчеркнуть значение последней задачи, ибо в ряде источников сущность ИПП определяется лишь как создание проекта деятельности человека без последующего учета влияния этой деятельности на характеристики системы в целом, без оценки того, насколько хорошо этот проект впишется в систему в целом. При этом происходит нарушение принципа системности, а само проектирование в такой постановке противоречит системному подходу, поскольку проект деятельности человека создается в отрыве от проекта системы в целом.
Возможная структура инженерно-психологического проектирования на примере системы «человек – машина» управляющего типа представлена на рис. 14.1 и в табл. 14.1.

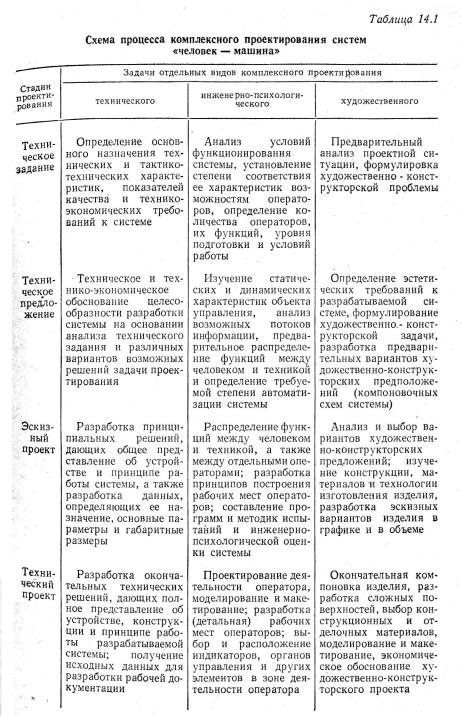
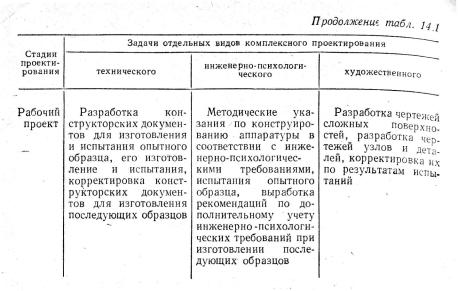
Проектирование начинается с анализа задач, которые должна решать система. Для этого проводится анализ статических и динамических характеристик объекта управления, анализ возможных потоков циркулирующей в системе информации, в общих чертах оцениваются возможности человека и техники по решению стоящих перед системой задач.
Следующим этапом является распределение функций между человеком и техникой по решению этих задач. Распределение функций ведется с учетом преимущественных возможностей человека и техники по отношению друг к другу и в целях оптимизации некоторого выбранного критерия эффективности системы, который, может быть как частным, так и общим. При оптимизации по частному критерию следует иметь в виду, что система, оптимальная с точки зрения одного критерия, может быть неоптимальной с точки зрения другого. Поэтому более целесообразным является оптимизация по обобщенному критерию при наложении целого ряда ограничивающих условий на частные критерии. Такая задача решается методами математического программирования (линейного, динамического, выпуклого и др.).
После того как определены исполнители (человек или техника) для каждой из задач, проводится проектирование групповой деятельности – распределение функций между отдельными операторами. При решении этой задачи нужно стремиться к максимально возможному упрощению структуры группы и связей между операторами. Однако при этом всегда нужно иметь в виду, что упрощение структуры группы, в ряде случаев может привести к недопустимой информационной перегрузке отдельных операторов. Это следует исключить в процессе проектирования. В итоге на этом этапе должны быть решены следующие задачи: определены типы и количество рабочих мест, решаемые на каждом из них задачи, необходимые информационные связи между отдельными операторами.
После этого следует собственно проектирование деятельности оператора. Этот этап ИПП условно можно разделить на две фазы: проектирование внутренних средств деятельности оператора и проектирование технических средств его деятельности.
Необходимо отметить, что рассмотрение этого этапа ИПП в виде двух отдельных фаз является чисто условным. Фактически между ними невозможно провести четкую границу, они в значительной степени взаимосвязаны между собой и решаются одновременно, параллельно, но все же с определенным опережением первой фазы по сравнению со второй.
Необходимость решения первой задачи определяет принципиальное отличие системного подхода от традиционного технического проектирования. В результате ее решения определяются структура и алгоритмы деятельности оператора в различных режимах работы СЧМ, способы выполнения этой деятельности, требования к психофизиологическим характеристикам человека (объему памяти и внимания, скорости реакции, эмоциональной устойчивости и др.), производится проверка выполнения предельно допустимых норм деятельности оператора. Вторая задача заключается в проектировании технических средств, с которыми взаимодействует оператор в процессе работы. При этом осуществляется разработка средств отображения информации, органов управления, производится общая компоновка рабочего места.
Последний этап проектирования – инженерно-психологическая оценка проекта и сравнение полученных результатов с требуемым техническим заданием на систему. Оценке подлежат основные характеристики СЧМ (надежность, быстродействие, стоимость и др.) условия работы оперативного и обслуживающего персонала, конструкция системы и особенности организации рабочих мест операторов и целый ряд других вопросов, более подробно рассмотренных в следующей главе. В случае несоответствия каких-либо характеристик требуемым разработанный проект уточняется, пока не будет получен приемлемый результат.
Инженерно-психологическое проектирование представляет собой циклический процесс. Цикличность ИПП заключается в необходимости решения всех перечисленных задач на каждой из стадий проектирования (при разработке технического задания и предложения, на стадиях эскизного, технического и рабочего проектирования, при различного рода испытаниях и т. д.). При этом на каждой последующей стадии разработанный проект уточняется и улучшается. Следовательно, в ходе проектирования осуществляется последовательная оптимизация проекта СЧМ. Если на начальных стадиях большинство задач проектирования решается приближенно, в основном лишь на качественном уровне, то на последующих стадиях эти же задачи решаются с большей точностью.
Из сказанного следует, что все задачи в той или иной степени решаются на каждой из стадий проектирования. Однако уровень проработки и решения этих задач на каждой из стадий проектирования может быть различным. Одни задачи могут решаться в общем виде, другие – детально, третьи уточняются после решения их на предыдущем этапе. Уровень и методы решения отдельных задач на различных стадиях проектирования, а также на этапах испытаний и эксплуатации приведены в табл. 14.2
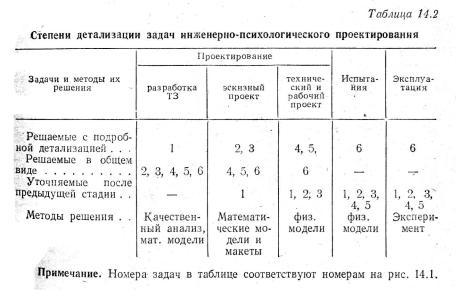
Содержание работ по учету человеческого фактора на различных стадиях проектирования
В соответствии с принципами и структурой ИПП, рассмотренными в предыдущем параграфе, любая из задач по учету человеческого фактора в той или иной степени должна решаться на каждой из стадий проектирования систем «человек – машина». Поэтому представляется целесообразным более подробно раскрыть содержание работ по учету человеческого фактора на различных стадиях проектирования.
Основными вопросами учета человеческого фактора, подлежащими согласованию в ТЗ, являются: эксплуатационная надежность системы в различных режимах с учетом работы операторов; количество и функции операторов, предполагаемый уровень их подготовки и сроки обучения, условия их работы; принципы построения, тип и требования к техническим средствам подготовки операторов (тренажерам); порядок испытаний и оценки соответствия выполненных работ по учету человеческого фактора требованиям ТЗ.
Методы выполнения этих работ могут быть различными: изучение и анализ документов, обосновывающих необходимость разработки системы; изучение характеристик объекта управления; изучение прототипа (если такой имеется); изучение и анализ результатов опроса и анкетирования лиц, эксплуатирующих аналогичную технику. Для решения перечисленных задач могут использоваться также методы экспертных оценок и математического моделирования. На этой стадии проводится также калькуляция средств, необходимых для обеспечения комплекса работ по учету человеческого фактора.
При разработке технического предложения проводится сравнительная оценка возможностей человека и техники по скорости, точности и надежности переработки информации и осуществляется предварительное распределение функций между ними. В итоге может быть составлен перечень задач, подлежащих автоматизации, и определена требуемая степень автоматизации системы.
В ходе дальнейшей работы решается задача предварительного распределения функций, решаемых системой, между отдельными операторами, определяются наиболее рациональные способы предъявления операторам информации и выдачи ими управляющих воздействий. Такая задача должна быть решена для каждого рабочего места в отдельности.
Уже на этом этапе проектирования необходимо провести предварительное определение требований к операторам, прежде всего к тем психофизиологическим характеристикам, которыми они должны обладать, и требуемой степени их квалификации. Это позволяет ответить на вопрос, нужно ли в создаваемой системе проводить профессиональный отбор операторов, а также определить требования к объему и характеру обучения операторов.
В результате всей проделанной на данном этапе работы уточняются технические требования к проектируемой системе и разрабатывается техническое задание на эскизное проектирование.
На стадии эскизного проектирования уточняется количество я содержание информации, необходимой для обеспечения Эффективного функционирования отдельных подсистем, а также те требования, которые должны быть предъявлены к способам и средствам представления этой информации. Тут же предусматривается возможность и необходимость резервирования информации.
На стадии эскизного проектирования продолжается также процесс предварительного проектирования деятельности операторов. Это заключается в разработке рациональных методов и способов выполнения ими своих функций, определении характера и режима их работы.
Одновременно с этой задачей необходимо обосновать требования к органам управления, регулирования и ввода информации и разработать рекомендации по их проектированию. После определения требований к отдельным элементам рабочих мест (средствам отображения информации и органам управления) появляется возможность обосновать требования к организации рабочего места в целом, а также к тем условиям окружающей среды, в которых будет протекать деятельность оператора.
Для этого целесообразно составить перечень режимов функционирования системы и разработать предварительные алгоритмы деятельности операторов в каждом из этих режимов. Заканчивается эскизное проектирование уточнением требований к психофизиологическим характеристикам операторов, обоснованием методик их отбора и обучения.
На стадии технического проектирования обычно появляется возможность более обоснованного распределения функций между человеком и техникой, а также между отдельными операторами. Эти задачи могут быть решены уже с помощью количественных методик; необходимые исходные данные для этого, как правило, уже имеются.
После этого проектируются с подробной детализацией средства взаимодействия операторов с технической частью системы на всех рабочих местах. При необходимости целесообразно изготовить макет рабочего места, на котором можно проверить и уточнить расположение индикаторов и органов управления, а также расположение оператора за пультом управления и условия обитаемости (внешней среды).
Как показывает практика проектирования, на этой стадии следует приступить к разработке программы и методик испытаний и инженерно-психологической оценки проектируемой системы. Особое внимание нужно уделить оценке алгоритмов работы операторов – определению временных затрат, вероятного числа ошибок при выполнении каждой функции, степени и характера загрузки оператора, его производительности, реальных и предельно допустимых норм деятельности.
С помощью разработанных методик можно провести испытания на макете рабочего места. Результаты макетирования позволяют уточнить компоновку рабочего места и алгоритмы работы оператора.
На этой же стадии проектирования обычно разрабатываются проекты технического описания и инструкции по эксплуатации системы. При решении этой задачи нужно особое внимание обратить на обеспечение возможности легкого и быстрого изучения и освоения по ним техники. Параллельно с этим определяются требования к тренажерам, имитаторам, средствам контроля за деятельностью и состоянием оператора и другим вспомогательным устройствам.
Заканчивается техническое проектирование, как правило, оценкой пропускной способности системы и аналитическим расчетом надежности, точности, быстродействия и эффективности системы «человек – машина».
Рабочее проектирование начинается с разработки методических указаний на конструирование аппаратуры в соответствии с общими инженерно-психологическими требованиями. На этой же стадии обычно осуществляется изготовление опытного образца аппаратуры и намечаются программы испытаний с целью проверки соответствия его характеристик требованиям учета человеческого фактора. Для решения этой задачи, желательно составить программы и методики оценки информационных потоков, определения ошибок операторов, оценки алгоритмов их работы, определения пропускной способности и надежности оператора, предельно допустимых норм его деятельности, степени приспособленности аппаратуры для обслуживания ее человеком. Завершается эта работа определением затрат сил и средств при решении перечисленных задач, что необходимо для получения исходных данных для экономического анализа работы системы.
После того как будут разработаны необходимые программы и методики, можно приступить к проверке опытного образца на соответствие техническим требованиям. По результатам этой проверки представляется возможность получения рекомендаций по учету инженерно-психологических требований при создании серийных образцов аппаратуры.
Мероприятия по учету человеческого фактора, по проверке выполнения инженерно-психологических норм и требований должны проводиться также при последующих испытаниях и эксплуатации систем «человек – машина». Данные, полученные на этих этапах, необходимы для оценки полноты и правильности учета инженерно-психологических норм и требований при проектировании системы. Анализ данных позволяет вскрыть имеющиеся недоработки и учесть их при модернизации данной системы и проектировании новых систем. Только такой всесторонний подход к учету человеческого фактора, охватывающий все этапы проектирования, испытаний и эксплуатации, позволяет обеспечить наиболее высокую эффективность СЧМ.
Общие инженерно-психологические требования к проектированию систем «человек-машина»
На основании рассмотренной в предыдущих параграфах структуры и характера ИПП могут быть сформулированы общие инженерно-психологические требования к проектированию систем «человек– машина». Эти требования необходимо учитывать при разработке приборов, оборудования, аппаратуры для обеспечения эффективной, работы операторов и систем в целом. Основные из этих требований сводятся к следующему.
В результате проектирования необходимо обеспечить заданные характеристики (надежность, точность, быстродействие и др.) не только технических устройств, а прежде всего системы «человек – машина» в целом. Выполнение этого требования является одной из основных задач при системном подходе к проектированию.
Не менее важным требованием является соблюдение оптимальных и предельно допустимых норм деятельности оператора. Безусловно, социалистическое общество заинтересовано в повышении эффективности использования техники. Однако ему, в отличие от капиталистического общества, не безразлично, какой ценой это будет достигнуто. Поэтому наряду с задачей создания наиболее эффективной техники должна решаться и другая – обеспечение наиболее, благоприятных условий для работающего человека.
Для проверки выполнения этих условий в инженерной психологии вводится понятие предельно допустимых норм деятельности оператора, под которыми понимаются те значения некоторых параметров, характеризующих условия деятельности оператора, Превышение которых может вызвать нежелательные отклонения в его состоянии и будет оказывать неблагоприятное влияние на организм человека.
Условием нормального протекания операторской деятельности является соблюдение рассмотренных предельно допустимых норм деятельности. Проверку их соблюдения необходимо проводить уже на самых ранних этапах проектирования СЧМ.
К настоящему времени разработан целый ряд требований, выполнение которых необходимо при конструировании рабочих мест операторов. Эти требования могут быть сформулированы следующим образом.
Устройства отображения информации, пульты управления и контроля, эксплуатационная документация, маркировка аппаратуры, контрольные точки и другие компоненты СЧМ должны строго соответствовать своим техническим условиям.
При проектировании любого из компонентов рабочего места следует стремиться к максимальному выполнению требований и принципов инженерной психологии (принципа функциональной организации, значимости, последовательности, частоты использования, удобства и безопасности эксплуатации, ремонтопригодности и ремонтоспособности и др.); размещение органов управления должно облегчить оператору запоминание и воспроизведение последовательности действий и соответствовать принципам экономии движений и времени.
При выборе способа, формы и характера представления информации оператору необходимо учитывать возможности органов восприятия и другие психофизиологические характеристики человека. Размещение операторов у пультов управления и на других местах должно производиться с учетом антропометрических и психофизиологических данных и обеспечивать минимальную утомляемость и максимальное удобство.
Выполнение при проектировании следующей группы требований обеспечивает хорошее удобство эксплуатации аппаратуры. В первую очередь, это достигается в том случае, если обслуживание будет максимально упрощено, не потребует для выполнения профилактических и регламентных работ высокой квалификации операторов, а эксплуатационно-техническая документация может обеспечить легкость и быстроту понимания, изучения и освоения техники.
Система при необходимости должна иметь встроенные или придаваемые к ней устройства контроля работоспособности оператора. Выполнение этого требования позволяет разработать наиболее оптимальный режим труда и отдыха операторов и, как показывает опыт эксплуатации СЧМ, является одним из способов обеспечения их высокой надежности. Другим способом повышения надежности работы оператора и системы в целом является самоконтроль оператором своих действий. Поэтому при проектировании деятельности оператора целесообразно предусмотреть возможность такого самоконтроля, который может быть как инструментальным (т. е. осуществляться с применением специальных технических средств), так и неинструментальным (т. е. заложенным в алгоритме деятельности оператора).
Повышению надежности работы системы способствует научно обоснованное распределение функций между человеком и техникой, а также между отдельными операторами. Распределение функций будет произведено наиболее качественно в том случае, если будут использованы специальные методики, разработанные в инженерной психологии.
При разработке технических средств одновременно должны решаться и вопросы согласования индикаторов и органов управления с характеристиками человека. Нарушение этих требований снижает эффективность СЧМ и вызывает нежелательные отклонения в работе человека. Однако опыт проектирования СЧМ показывает, что это требование выполняется не всегда.
Избежать подобных просчетов при создании новой техники помогает строгое выполнение в ходе проектирования инженерно-психологических норм и требований.
Возможные методы решения отдельных задач инженерно-психологического проектирования
На рис. 14.1 была рассмотрена возможная структура инженерно-психологического проектирования. Эта структура представлена в виде перечня задач, решаемых на каждом из этапов проектирования. Рассмотрим подробнее возможные методы решения этих задач.
Исходной фазой проектирования является анализ объекта управления, его статических и динамических характеристик, возможных потоков информации. Там, где это возможно, такой анализ можно проводить на объекте, являющемся прототипом проектируемого. На этом объекте анализируются задачи и алгоритмы работы оператора, определяются потоки перерабатываемой им информации и время, отводимое для их обработки, выявляются все «узкие места» в работе оператора, анализируются причины ошибок. В результате этой работы выявляются недостатки по учету человеческого фактора на объекте-прототипе.
Если прототипа не имеется, то для проведения анализа может быть построена математическая модель функционирования объекта управления и деятельности оператора по управлению им.
В основе построения моделей, описывающих поведение объекта управления и воздействие на него оператора, может использоваться различный математический аппарат. Наибольшее распространение в инженерной психологии получили методы теории информации, массового обслуживания, автоматического регулирования. В качестве переменных в эти модели вводятся характеристики объекта управления и человека-оператора, искомыми являются результаты поведения объекта управления при различных значениях переменных.
В простейших случаях для реализации модели применяются аналитические методы, в более сложных случаях ее реализация осуществляется методом статистического моделирования с использованием ЭВМ. В результате решения модели определяются возможные и допустимые характеристики поведения объекта управления.
После получения представления об общем характере поведения объекта управления и результатах воздействия на него оператора можно приступать к решению задачи распределения функций между человеком и техническими устройствами. На ранних этапах проектирования основное применение находит качественный метод, согласно которому распределение функций между человеком и техникой производится в соответствии с преимущественными возможностями каждого из них.
Для решения этой задачи пользуются специальными перечнями сравнительных характеристик (возможностей) человека и машины.
На поздних этапах проектирования могут быть применены более точные количественные методы распределения функций. Один из таких методов заключается в следующем.
Находится выражение для описания целевой функции системы «человек – машина». С помощью этой функции может быть определена эффективность ее функционирования для достижения поставленной цели. Целевую функцию удобнее всего записывать в виде линейной формы,
![]()
где х – частные критерии эффективности, например надежность, быстродействие, стоимость и др.; а – коэффициенты веса, которые могут быть найдены методом экспертных оценок.
После этого строится функциональная структура системы, обеспечивающая решение поставленной задачи. Под ней понимается такое изображение структуры, в которой каждому элементу приписаны определенные действия, но не выбрано, каким реальным образом это, действие реализуется. Например, функциональная структура вычисления величины у = (ахг + 'bx2) : (*i + хг) показана на рис. 14.2.

Функциональная структура с помощью методов теории графов может быть приведена к такой схеме, в которой операции совершаются только последовательно, например, так, как показано на рис. 14.2.
Пользуясь функциональной структурой, находят аналитические зависимости критериев эффективности системы от аналогичных критериев отдельных блоков функциональной структуры.
Из технических условий на проектируемую систему определяют предельные значения частных критериев эффективности. Задача проектирования будет считаться полностью решенной, если для каждого частного критерия эффективности системы будут выполнены условия:
![]()
Знак (> или <) в выражениях 14.2 зависит от смысла величин хi. Например, такие величины, как надежность, пропускная способность, должны быть не меньше некоторого заданного значения, другие же (стоимость, потребляемая мощность и т. п.) должны быть, наоборот, не больше заданного значения.
Каждый элемент функциональной структуры может быть реализован с помощью различных технических устройств или человеком-оператором. Задача распределения функций состоит в том, чтобы для заданной функциональной структуры подобрать такой вариант реализации отдельных блоков (элементов), который делает эффективность системы максимальной. В математической постановке задача заключается в максимизации функционала (14.1) при выполнении ограничивающих условий (14.2). С математической точки зрения решение задачи не представляет принципиальных трудностей и решается методами дискретного программирования.
Рассмотренный метод распределения функций не является единственно возможным. Кроме него существуют и другие. Интересный метод, основанный на применении экспертных оценок, предложен и успешно применяется при решении практических задач в Харьковском филиале ВНИИТЭ. Сущность его заключается в следующем.
Экспертная комиссия, в состав которой входят высококвалифицированные специалисты (конструкторы, технологи, инженеры-эксплуатационники), производит отбор параметров технологического процесса, которые необходимы, по ее мнению, оператору для управления последним. Эти параметры подлежат выводу на информационную модель. Для каждого из них определяются следующие показатели: ранг, приоритет, частота использования при управлении технологическим процессом, требуемые средства реализации (выдачи оператору) данного параметра. За окончательное решение принимаются среднеарифметические значения оценок отдельных экспертов. В результате проведения этой работы определяется перечень задач, решаемых оператором при управлении производственным процессом.
Следующей задачей ИПП является распределение функций между отдельными операторами. Для ее решения могут быть использованы математические методы теории графов и данные групповой психологии. В общих чертах решение данной задачи может приводиться в такой последовательности.
На основании проведенного распределения функций между человеком и техникой определяются задачи, решаемые операторами. Исходя из возможной структуры процесса управления и особенностей групповой деятельности, выбирается приемлемая структура группы. При выборе структуры следует стремиться к уменьшению общего показателя периферийное™ и числа ребер структурного графа. Однако при этом следует учесть психофизиологические возможности операторов по приему и обработке информации, ибо стремление к упрощению структуры группы может привести к недопустимой нагрузке, приходящейся на одного оператора. Кроме того, необходимо также проверить величину коэффициентов взаимного влияния и обеспечить их допустимые значения. Затем определяется положение лидера и ведомых в группе и формулируются основные требования к ним. В некоторых случаях для повышения надежности и быстродействия работы операторов может быть применено дублирование (резервирование) их работы. В итоге определяется необходимое количество рабочих мест, их иерархия, необходимые информационные связи между отдельными операторами и возможные методы технической реализации этих связей.
Определив роль и место оператора в проектируемой системе, решаемые им задачи, можно приступить к обоснованию тех технических средств, с которыми предстоит работать оператору и которые наилучшим образом смогут обеспечить правильное и своевременное решение стоящих перед ним задач. В результате этого происходит выбор необходимых средств отображения информации и органов управления, осуществляется расположение их в поле деятельности оператора, производится компоновка рабочего места оператора и выбирается архитектурно-планировочное решение интерьера пункта управления.
Как правило, окончательный вариант построения рабочего места получается не сразу. Первоначальные варианты приходится несколько раз уточнять в ходе проектирования деятельности оператора. Эта задача является одной из наиболее важных в инженерно-психологическом проектировании. Однако относительно содержания и методов ее решения у различных специалистов пока не выработалось единого, мнения. По нашему мнению, проектирование деятельности должно включать в себя решение следующих задач: разработка алгоритма (структуры) деятельности оператора при решении различных задач, проверка возможности своевременного и точного выполнения разработанного алгоритма; определение требований к психофизиологическим характеристикам операторов, степени их обученности и профессиональной пригодности, обеспечивающих качественное выполнение алгоритма; разработка рекомендаций по формированию у операторов требуемых качеств; разработка методов и устройств контроля за деятельностью оператора; разработка методов и устройств для проведения тренировок.
Структура деятельности оператора по решению той или иной задачи на данном рабочем месте представляется «в виде последовательности отдельных операций и логических связей между ними. Зная характеристики (точностные и временные) выполнения отдельных операций, можно путем последовательного сворачивания сложных структур к более простым найти соответствующие характеристики выполнения алгоритма в целом. Полученные характеристики сравниваются с заданными или требуемыми, в результате чего может быть сделан вывод о возможности выполнения алгоритма с заданным качеством.
В случае необходимости выполнения особенно сложных алгоритмов и невозможности распределения их между несколькими операторами приходится предъявлять повышенные требования к некоторым психофизиологическим характеристикам оператора, например к памяти, вниманию, скорости реакции и др., а также к необходимой степени обученности. Иными словами, уже на этапе проектирования необходимо предъявить определенные требования к профессиональному отбору, проведение которого может обеспечить выполнение алгоритма с заданным качеством. Один из возможных методов решения этой задачи заключается в следующем.
С помощью математической модели определяется, какие нежелательные состояния в системе «человек – машина» могут иметь место. К числу таких состояний могут быть отнесены: дефицит времени, частое появление очереди сигналов, большое число одновременно поступающих сигналов, большая загруженность оператора и др. Определив, какие нежелательные состояния встречаются наиболее часто, можно указать, к каким характеристикам оператора должны быть предъявлены повышенные требования, чтобы он успешно мог работать при наступлении этих состояний. Предъявление этих требований при отборе операторов способствует качественному выполнению ими заданных алгоритмов.
Модель деятельности оператора можно составить таким образом, чтобы в качестве исходных данных в нее входили различные психофизиологические характеристики. В этом случае можно конкретно определить характеристики для выполнения алгоритмов с заданным качеством. После этого необходимо определить возможность получения этих характеристик.
В некоторых случаях эти требования могут быть обеспечены в результате профессионального отбора, в других случаях необходимо разработать систему мероприятий по развитию и совершенствованию требуемых качеств.
В ходе проектирования должны быть разработаны также средства контроля за деятельностью операторов. Этот контроль может осуществляться в двух направлениях. Во-первых, это контроль результатов работы оператора, т. е. контроль правильности и своевременности выполнения предписанного ему алгоритма. Это если можно так выразиться, контроль внешнего состояния оператора. Во-вторых, необходимо контролировать и внутреннее, психофизиологическое состояние оператора в процессе работы, т. е. нужно определить то напряжение, которое испытывает оператор во время работы.
Наличие средств контроля позволяет определить напряженность выполнения оператором отдельных участков алгоритма, выяснить возможные причины ошибочных и несвоевременных действий, оценить качество его работы. Все это нужно проектировщику для оценки степени совершенства созданных алгоритмов, позволяет учесть имеющиеся недоработки в ходе дальнейшей работы. Применение средств контроля позволяет в конечном итоге осуществить обратную связь от стадии эксплуатации к стадии проектирования СЧМ.
В целом проведение ИПП позволяет обеспечить высокую работоспособность и эффективность деятельности оператора и всей системы «человек – машина». Это достигается выполнением в ходе проектирования мероприятий конструктивного, организационного и медико-биологического характера.
Из сказанного видно, насколько сложным является решение многих задач ИПП. В его проведении должны участвовать специалисты различных профилей: инженеры, психологи, художники и др. Только такой системный подход к решению задач проектирования может обеспечить высокие значения показателей функционирования СЧМ. И несмотря на дополнительные затраты средств и времени, которые при этом неизбежны, проведение ИПП в итоге дает большой народнохозяйственный экономический эффект за счет значительного повышения качества и эффективности разрабатываемых систем.
Психологические аспекты эксплуатации сложных систем
Контроль состояния оператора
Помимо профессионального отбора и обучения операторов, организации их групповой деятельности в процессе эксплуатации СЧМ возникает еще и целый ряд других вопросов, связанных с поддержанием эффективности СЧМ на требуемом уровне. К числу этих вопросов относятся: контроль состояния и результатов деятельности оператора, совершенствование психологических характеристик операторов, разработка эксплуатационно-технической документации.
Применительно к задачам инженерной психологии под состоянием человека-оператора, выполняющего определенную задачу, обычно понимают комплексную характеристику внутренних возможностей успешного решения этой задачи. Как правило, такая характеристика является многокомпонентной и представляет собой набор показаний, описывающих множество физиологических и психических параметров, варьирующихся в довольно широких пределах не только у различных людей, но и у одного конкретного человека в разные моменты времени.
В некоторых случаях целесообразно осуществлять непрерывный контроль состояний оператора, используя с этой целью специальные устройства.
К обычной системе «человек – машина», в которой связи между оператором и управляемым им техническим устройством можно рассматривать как первичный контур регулирования (оператор играет в нем задающую, регулирующую роль), добавляется вторичный контур, осуществляющий контроль состояний оператора (рис. 18.1).
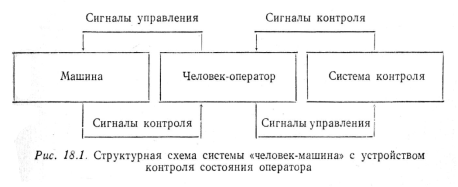
Этот контроль должен обеспечить обнаружение изменений состояния оператора, прогнозирование дальнейших изменений и соответственно генерирование специальных сигналов оператору (например, способствующих концентрации внимания, извлечению из памяти необходимой информации и т. д.) или управление условиями работы (например, перераспределение информационной нагрузки между человеком и автоматом, регулирование ширины полосы сигналов, скорости передачи информации и т. д.).
Возможные виды контроля состояния оператора весьма разнообразны, классификация их приводится на рис. 18.2.
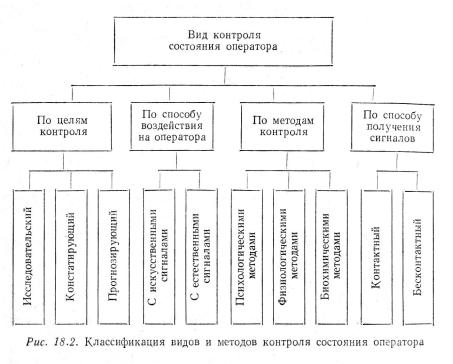
В зависимости от поставленных целей контроль состояния оператора может быть исследовательским, констатирующим и прогнозирующим. Исследовательский контроль применяется для проверки адекватности выдвигаемых инженерно-психологических решений, выбора наилучшего из имеющихся вариантов. На основании результатов такого контроля, проводимого в процессе инженерно-психологического эксперимента, делается вывод о целесообразности или нецелесообразности внедрения в практику данной инженерно-психологической разработки.
Констатирующий контроль применяется для проверки готовности оператора к выполнению данной деятельности, например, к заступлению на дежурство, выезду или вылету в рейс и т. д. Прогнозирующий контроль проводится с целью предсказания возникновения у оператора нежелательных состояний, которые могут служить причиной снижения эффективности его деятельности Такой контроль необходим в тех случаях, когда оператор выполняет особо ответственные функции и его ошибка или промедление могут привести к серьезным последствиям. Поэтому возникает задача предвидеть эти нежелательные состояния раньше, чем это сказалось на результатах деятельности оператора, и принять меры к предотвращению наступления таких состояний.
В зависимости от применяемых методов контроль состояния может вестись по изменению физиологических, психологических, биохимических показателей. К сказанному там остается добавить, что они характеризуют собой степень напряженности организма и не всегда позволяют определять работоспособность оператора, а тем более прогнозировать ее изменение. Кроме того, их использование требует применения сложной аппаратуры для регистрации и учета происходящих изменений в организме человека.
Психологические показатели (памяти, внимания, эмоционально-волевой сферы и т. д.) более тесно коррелируют с результатами деятельности, чем физиологические показатели. Это связано с их регулирующей функцией в деятельности. Процесс переработки информации оператором может быть представлен в виде сложной иерархической структуры, каждому уровню которой соответствуют определенные психические процессы. Для оценки состояния оператора целесообразно тестировать сенсорную память, процессы фильтрации и перекодирования информации в кратковременной памяти, перевод информации в долговременную память, элементарные логические преобразования и организацию ответных действий. В качестве тестовых воздействий операторам может быть предложено решение таких задач, как поиск сигнала в шуме, определение отсутствующей цифры, полное воспроизведение и др. По изменению результатов решения этих задач по сравнению с исходным (эталонным) для каждого оператора можно судить об изменении его состояния, например, о степени утомления. Обладая сравнительно высокой прогностичностью, психологические показатели имеют и существенный недостаток, связанный с тем, что для измерения требуется специальное тестовое воздействие на оператора, отвлечение его от выполнения основной деятельности.
Биохимические показатели (например, состав крови) могут давать информацию о степени напряжения оператора, возникновении стрессовых состояний и т. д. Однако в практике инженерно-психологических исследований они используются редко. Это связано с трудностью получения и регистрации этих показателей непосредственно в процессе трудовой деятельности.
В зависимости от способа воздействия на оператора для получения сигналов о его состоянии методы контроля можно использовать как при естественных, так и искусственных воздействиях среды. В первом случае сигналы состояния оператора снимаются в ходе выполнения им основной деятельности. Во втором случае для получения сигналов о состоянии оператора основная деятельность прекращается, и в это время ему дается специальное тестовое воздействие. В это же время и происходит съем сигналов состояния оператора. Примером метода с искусственным воздействием являются почти все психологические тесты.
И, наконец, в зависимости от способа получения сигналов методы контроля состояния оператора могут быть контактными и бесконтактными. При контактных методах для получения сигналов состояния оператора к тем или иным участкам тела оператора крепятся датчики. При бесконтактных методах сигналы состояния естественным образом образуются в ходе выполнения либо самой деятельности, либо при обработке тестового задания.
К методам и системам контроля предъявляется целый ряд требований: отсутствие последействия (влияния на результаты работы оператора), малая инерционность (получение результатов контроля должно осуществляться в истинном масштабе времени), высокая помехоустойчивость, достоверность, информативность. Для прогнозирующего контроля важным требованием является также его непрерывность.
Из рассмотренной классификации видов и методов контроля видно, что каждый из них обладает определенными достоинствам и недостатками. Некоторые рекомендации по выбору методов контроля приводятся в табл. 18.1.
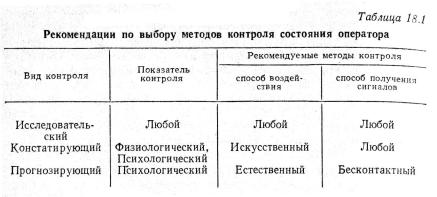
Наибольшие трудности вызывает проведение прогнозирующего контроля и прежде всего исключение контактных методов, обеспечение естественного воздействия на оператора. Поэтому представляется весьма важным рассмотреть некоторые из возможных методов, наиболее полно удовлетворяющих рассмотренным требованиям.
Весьма перспективным является использование для целей контроля речевого сигнала оператора. Возможность применения метода заключается в том, что практически любой вид деятельности оператора связан с речью (разговор по телефону, ответы на запросы других операторов, доклады начальникам и т. п.). Данный метод не нарушает и не изменяет деятельности операторов, кроме того, он позволяет осуществить непрерывный, автоматический, дистанционный и бесконтактный контроль состояния оператора.
В речевом сигнале содержатся признаки, характеризующие не только индивидуальные особенности оператора, но также его эмоциональное и физиологическое состояние, причем эти признаки можно выделить и отдифференцировать.
К признакам, несущим информацию о психофизиологическом состоянии, можно отнести:
изменение динамического диапазона речи;
смещение энергетического спектра речи;
изменение частотного спектра речи (увеличение или уменьшение числа спектральных составляющих);
смещение форматных частот относительно своего среднего уровня; изменение частоты основного тона;
временные характеристики речевого сигнала, такие, как длительность слогов, слов и отдельных фраз, длительность пауз между слогами и словами, латентный период речевого сигнала и т. п.
Рассмотрение перечисленных признаков показывает, что контроль состояния оператора может проводиться по результатам анализа энергетических, частотных (спектральных) или временных характеристик речевого сигнала. Энергетические характеристики обладают сравнительно низкой специфичностью и информативностью, они могут использоваться в сочетании лишь с другими показателями.
Спектральные характеристики речи обладают большей информативностью, изменение их меньше зависит от желания и установки оператора. Однако имеются очень большие трудности с точки зрения практической реализации данного метода. Этот метод требует применения сложных полосовых фильтров.
Перспективным является использование для контроля состояния оператора временных характеристик речевого сигнала. Известно, что нарастание утомления у человека приводит к изменению длительности произнесения слов в фразе, пауз между ними и т. п.
Структурная схема устройства для анализа временных характеристик речевого сигнала показана на рис. 18.3.
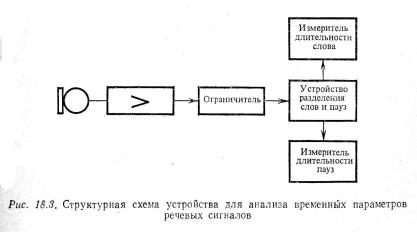
С помощью прибора проведен контроль состояния оператора при выполнении им определенной деятельности за пультом управления 1. В качестве параметра, по которому судилось о работоспособности оператора, было использовано время обработки им поступившего сообщения. При анализе состояния оператора измерялась длительность τсл первого слова доклада об обработке сообщения и пауза τп между первым и вторым словами. Результаты измерений подвергались статистической обработке, в результате чего вычислялись математические ожидания измеряемых величин τсл, τп и их среднеквадратические отклонения σсл и σп.
Полученные результаты показаны на рис. 18.4. Из рисунка видно, что изменение параметров речевого сигнала отражает также и работоспособность оператора. Причем изменение параметров речевого сигнала наступает несколько раньше, чем начинается ухудшение показателей работоспособности оператора τраб и σраб (математическое ожидание и среднеквадрэтическое отклонение времени обработки сообщения). Это позволяет считать, что с помощью рассмотренных параметров речевого сигнала можно осуществлять прогнозирующий контроль состояния оператора.

Важным вопросом контроля оператора является определение допустимых отклонений контролируемых физиологических и психологических показателей от своих номинальных значений.
Для некоторых из них определены значения этих отклонений (см., например, табл. 7.1). В общем же случае заранее эти значения определены быть не могут. Для их определения в каждом конкретном случае можно воспользоваться одним из следующих способов.
Показатели состояния оператора считаются нормальными в процессе работы, если отклоняются не более чем на ± 10% от своего исходного уровня.
В результате статистического анализа психологических и физиологических показателей определенного контингента операторов находятся математические ожидания М и среднеквадратические отклонения σ, - этих показателей. Допустимыми в процессе работы считаются те из них, значения которых лежат в интервале Mi ± 2σi;.
Показатели состояния оператора считаются нормальными, если их изменение в процессе работы является незначимым (в статистическом смысле) по сравнению с исходным уровнем.
В зависимости от требуемой точности, собранного статистического материала, вида изучаемого показателя может использоваться тот или иной способ.
Контроль результатов работы оператора
Как было показано ранее, деятельность оператора имеет две стороны: внешнюю и внутреннюю. Обе эти стороны должны контролироваться в процессе работы оператора. Следовательно, помимо контроля психофизиологического состояния необходимо осуществлять и проверку результатов работы оператора, т. е. правильности и своевременности выполнения предписанного ему алгоритма. Иными словами, возникает необходимость контроля внешней стороны деятельности оператора. Проведение контроля за деятельностью оператора дает возможность определить напряженность выполнения оператором отдельных участков алгоритма, выяснить возможные причины ошибочных и несвоевременных действий, оценить качество его работы. Такое сопоставление результатов деятельности с теми «психологическими затратами», которые необходимы для их получения, позволяет дать полное представление о характере работы оператора.
Следует подчеркнуть еще одно важное обстоятельство. Наличие устройств текущего контроля состояния оператора повышает (психологически) чувство ответственности оператора за правильность своих действий и сохранение готовности к действию, с другой стороны, снимает напряженность, связанную с боязнью потерять бдительность при длительной работе. Такой положительный эффект текущего контроля особенно проявляется в системах «человек – машина», требующих точных и быстрых действий оператора.
Устройства контроля за деятельностью оператора могут быть специализированными или строиться на базе универсальных ЭВМ. Схема одного из специализированных устройств показана на рис. 18.5. Работает устройство следующим образом.
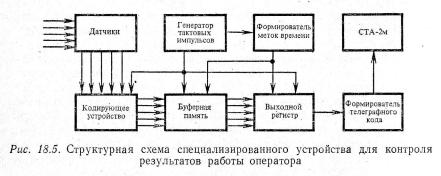
На всех индикаторах и органах управления рабочего места оператора устанавливаются датчики, с помощью которых снимается сигнал в тот момент времени, когда их состояние изменилось (нажалась кнопка, загорелся транспарант и т. д.). Сигнал с датчиков, каждому из которых присвоен свой код, преобразуется кодирующим устройством в телеграфный код и после соответствующего преобразования печатается на ленте телеграфного аппарата СТА-2М. Привязка во времени осуществляется нанесением меток времени, которые также печатаются на телеграфной ленте. Анализируя данные, напечатанные на ленте, можно дать подробную характеристику деятельности оператора при выполнении им любого заданного алгоритма.
В тех случаях, когда возникает необходимость контроля за деятельностью группы операторов, целесообразнее применение универсальной ЭВМ, в которую поступают сигналы с датчиков, фиксирующих действия операторов. Основные требования к ЭВМ, работающим в режиме контроля деятельности операторов, могут быть сформулированы следующим образом.
ЭВМ должна обеспечивать решение задач в реальном масштабе времени. Длительность решения задачи контроля и темп выдачи информации необходимо выдерживать в соответствии с темпом работы оператора.
В течение ограниченного времени ЭВМ должна не только решать большое количество задач, но и осуществлять обмен со многими внешними абонентами. При этом следует иметь в виду, что из-за асинхронности работы отдельных операторов не может быть определена заранее строгая последовательность решения машиной задач контроля.
От ЭВМ требуется высокая надежность и программная устойчивость к сбоям и отказам аппаратуры.
Учет этих особенностей и требований в процессе осуществления контроля за деятельностью операторов может производиться выбором соответствующей ЭВМ, а также программным путем. При этом ЭВМ может использоваться не только для контроля обученное™ операторов, но и для их обучения по заданной программе. Структурная схема устройства обучения операторов и контроля их деятельности, выполненного на базе управляющей машины «Днепр», показана на рис. 18.6.
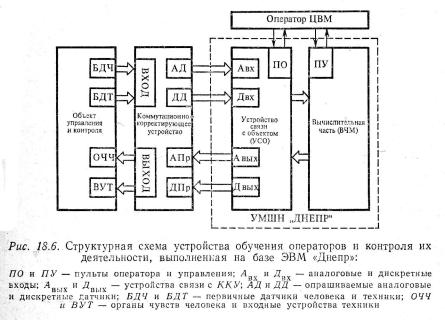
В память машины вводится массив эталонных ответов и два массива реакций машины – на правильные и неправильные ответы. Происходит сравнение ответа оператора с эталонным ответом. При их совпадении выдается сигнал «Правильно», одновременно обеспечивается сдвиг по массиву эталонных ответов и массивам реакций машины для подготовки следующего сравнения, а в случае несовпадения выдается сигнал «Неверно» и номер карточки с правильным решением. Сдвиг по массивам в этом случае не происходит. При переходе от задачи к задаче сама программа остается неизменной, меняется только входная информация программы – массивы эталонов ответов и реакций машины.
Кроме пультов операторов к ЭВМ подсоединяется командно-корректирующее устройство (ККУ). Оно служит для сопряжения с ЭВМ приборов и датчиков, измеряющих результаты деятельности операторов. Из ККУ отклонения параметров в виде кодов поступают в ЭВМ, где обрабатываются по заданному алгоритму и в виде поправок вводятся машиной в обучающий алгоритм, обрабатывающий данную программу обучения.
Таким образом, совершенствуется процесс обучения с помощью ЭВМ, работающей в режиме диалога. В результате этого достигается увеличение эффекта обучения как в количественной, так и в качественной форме, а также предоставляется возможность выработки универсальных программ подготовки операторов и контроля результатов их деятельности, т. е. возможность объективного отсева операторов в процессе отбора и обучения или аттестации их в процессе реальной трудовой деятельности.
Пути совершенствования психологических качеств оператора
Для многих видов деятельности эффективность работы оператора во многом определяется наличием у него профессионально важных психологических качеств, способствующих выполнению данного вида деятельности. Так, например, анализ деятельности радио телеграфиста показывает, что успешному выполнению им своей деятельности способствует наличие таких качеств, как хорошая слуховая память, острота слуха, устойчивая концентрация и распределение внимания и др.
Наоборот, признаками профессиональной непригодности являются пониженный слух, плохая слуховая память, низкий уровень работоспособности и т. д. (рис. 18.7). Следовательно, при прочих равных условиях лучшие результаты покажут те операторы, которые обладают более высокими психологическими качествами. Поэтому одной из задач эксплуатационного направления инженерной психологии является нахождение способов развития и совершенствования у данного контингента операторов необходимых для успешной работы психологических качеств.
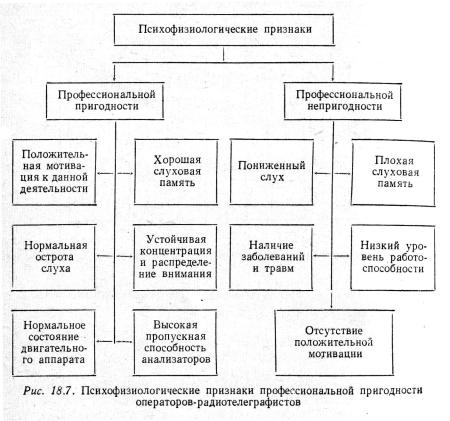
Одним из таких способов является эмоционально-волевая тренировка операторов. Основная цель ее заключается в том, чтобы обучить операторов способам саморегуляции, активизировать внимание, выработать состояние психической готовности к выполнению действий в условиях помех.
Система тренировки разделяется на два этапа: формирование умения оценивать свое состояние и мобилизацию. На первом этапе основное внимание акцентируется на мышечной релаксации (расслаблении), выработке чувства спокойствия и уверенности. Соответствующие упражнения преследуют цель создания у человека такого внутреннего состояния, которое позволило бы ему правильно (адекватно) оценивать свое состояние.
В период мобилизации задача состоит в том, чтобы научиться произвольно управлять своим состоянием. При этом предполагается обучить операторов вызывать у себя необходимые изменения и тем самым мобилизовать себя в период наступления усталости; формировать у операторов волевую установку в экстремальных условиях.
Некоторые из психологических качеств операторов могут быть повышены за счет проведения специальной физической подготовки. Это связано с широко известным в психологии явлением переноса тренированности, когда упражнения водной деятельности (например, спортивные) повышают достижения в другой области (трудовой деятельности). Так, установлено, что занятия боксом увеличивают скорость переработки информации в условиях выбора: у боксеров-разрядников она составляет 6,6–9,8 дв. ед./сек, у начинающих боксеров – всего 3,6–5,3 дв. ед./сек.
Физические упражнения могут оказать и прямое влияние на качество работы операторов. Непродолжительные занятия с включением общеразвивающих физических упражнений, проведенные за 20–30 мин до начала смены, сокращают период врабатываемости и повышают тонус организма. Физические упражнения, выполняемые самостоятельно через каждый час дежурства за пультом управления (5-минутные физкультпаузы), снижают утомление и повышают работоспособность операторов. Наиболее эффективны в этом случае упражнения для мышц плечевого пояса, шеи, вестибулярного аппарата (медленные повороты, наклоны, вращения головы и туловища); упражнения, связанные с регулированием дыхания; массажи мышц шеи и головы.
Еще большее значение для операторов имеет специально направленная физическая подготовка. В ее основе лежит улучшение отдельных психофизиологических качеств за счет воздействия на них специально подобранных физических упражнений, что способствует в свою очередь, повышению эффективности работы оператора (рис. 18.8).

Возможности средств физической подготовки для совершенствования психологических качеств операторов покажем на следующем примере. На производствах с высоким уровнем автоматизации операторы большую часть времени проводят в режиме ожидания (рис. 7.2, а). При возникновении аварии или отклонении производственного процесса от нормы они должны переключиться от режима ожидания к активным действиям по ликвидации аварийной обстановки и в течение ограниченного времени принять необходимое решение по управлению и произвести необходимые действия.
Такая деятельность предъявляет весьма высокие требования к целому ряду психофизиологических и физических качеств операторов. С помощью бланковых и аппаратурных методик установлена связь между успешностью выполнения операторских обязанностей, определяемых соответствующими нормативами, и уровнем этих качеств (табл. 18.2).
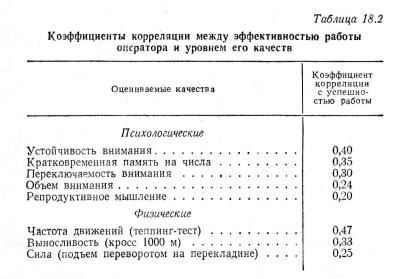
На рис. 18.9 показаны результаты профессиональной подготовленности операторов (работа за пультом управления). Анализ приведенных здесь данных показывает, что специальная физическая тренировка дает следующие преимущества:
большую скорость выхода на уровень устойчивой работоспособности (рис. 18.9, а, б);
большую скорость выполнения операций (рис. 18.9, с);
более высокую стабильность работы (рис. 18.9, а, б);
меньшее общее количество допущенных ошибок (рис. 18.9, б);
меньшее количество операторов, допустивших ошибки (рис. 18.9, в).
Таким образом, специальные физические упражнения (большинство из них может быть включено в комплекс производственной гимнастики) являются весьма действенным средством поддержания высокой стабильности психофизиологических функций, высокого уровня работоспособности и здоровья операторов.

Психологические аспекты совершенствования эксплутационно-технической документации
В связи с усложнением СЧМ и повышением уровня их автоматизации количество документов, приходящихся на одного оператора, существенно возросло. Эксплуатационно-техническая документация (ЭТД) является важнейшим источником информации, из которого оператор может получить необходимые сведения по устройству и функционированию, способам применения и особенностям эксплуатации техники в различных режимах, а также поиску и устранению возникших в ней неисправностей.
По сути дела, ЭТД является частью информационной модели системы, поскольку в большинстве видов деятельности оператора оказываются недостаточными только показания приборов и индикаторов. Особенно велико значение ЭТД как информационной модели СЧМ при поиске и устранении отказов и неисправностей. Поэтому правильный учет психофизиологических закономерностей является необходимым условием создания высококачественной ЭТД, а это, в свою очередь, способствует повышению эффективности деятельности оператора.
С точки зрения оформления, удобства пользования к технической документации предъявляются следующие требования, вытекающие из особенностей построения информационных моделей: документация должна быть комплектна, т. е. содержать все исходные данные, необходимые для обеспечения производительной работы;
документация должна быть максимально упрощена, т. е. не загружена лишней информацией;
документация должна быть унифицирована, т. е. содержать в одном документе необходимые данные для ряда объектов оборудования, однородных узлов и деталей;
информация в документации должна предъявляться оператору в форме, обеспечивающей ее непосредственное использование без расшифровки и перекодирования;
предъявляемая информация должна допускать возможность ее укрупнения или детализации, т. е. модель должна быть гибкой.
Если проанализировать с инженерно-психологических позиций существующую в настоящее время ЭТД, то в ней нередко можно встретить случаи невыполнения перечисленных требований. В ЭТД зачастую включаются документы, разработанные не с учетом деятельности операторов, а с учетом специфики организации производства аппаратуры на заводе-изготовителе. Особенно характерны эти недостатки для графической документации, из которой оператору приходится выбирать информацию, отсеивая массу технологических и конструктивных подробностей, имеющих при эксплуатации второстепенное значение.
Площадь графических документов (схем) зачастую используется нерационально. Так, например, на принципиальных электрических схемах активные элементы (транзисторы, конденсаторы и т. п.) занимают всего около 20% площади схемы, а остальная часть приходится на соединительные линии. Еще большая часть занята соединительными линиями на релейно-контактных схемах. Обычно при изучении таких схем соединительные линии приходится прослеживать карандашом или указкой, однако и при этом возникает чувство «ложной тревоги», заставляющее начать прослеживание сначала. Однако, несмотря на это, количество ошибочных прослеживаний (переходов на соседнюю линию) остается довольно высоким и доходит до 10%.
Текстовые документы (техническое описание и инструкция по эксплуатации) часто не допускают избирательного чтения, описание операций в них перемежается с пояснением функционирования аппаратуры. Во многих случаях инструкции содержат только словесный текст, неудобный в использовании. Если, например, оператор отрывается от текста, чтобы рассмотреть упомянутый в нем элемент индикации или орган управления, то ему сразу трудно найти слово или фразу, на которых он окончил чтение инструкции. Кроме того, объем инструкций обычно велик, описание одной технологической операции может занимать в ней несколько листов. В этом случае оператор не может, обозревая один лист, представить целиком характер всех предстоящих действий.
Недостатком существующих эксплуатационных документов является также их излишняя универсальность. Для каждого вида деятельности оператору, как правило, самому приходится разыскивать потребную ему информацию. Специальные инструкции разрабатываются лишь от случая к случаю.
Психологический анализ деятельности оператора по переработке графической и текстовой информации, анализ недостатков существующей ЭТД и требований, предъявляемых к ней, позволяют разработать некоторые рекомендации по совершенствованию эксплуатационно-технической документации. Одной из наиболее важных является инструкция по эксплуатации (работе за пультом управления). Ее назначение заключается в определении содержания трудовой деятельности в тех или иных ситуациях. Инструкция определяет, каким должно быть действие оператора в ответ на поступающий сигнал.
При составлении инструкции необходимо решить две основные задачи, вытекающие из характера трудовой деятельности человека:
распределение работ в пространстве и времени,
описание структуры работы оператора для каждого типового случая.
Исходя из этого, весьма удобным является составление инструкции не в текстовой форме, а в виде органиграмм или с применением специальных алгоритмических языков для описания действий оператора.
Принцип составления органиграмм (один из возможных приемов показан на рис. 18.10) заключается в расположении последовательных состояний информации в СЧМ в том порядке, который позволяет, с одной стороны, выявить и исчерпать логические возможности всех различных исходов, а с другой стороны, соответствует логике действий оператора. Основными достоинствами органиграммы по сравнению с текстовыми документами являются большая наглядность, краткость, однозначность определения действий оператора. Возможности органиграмм особенно возрастают при отображении их на экране дисплея. В этом случае в зависимости от ситуации оператор может вызвать на экран дисплея нужную органиграмму и по ней определить последовательность необходимых действий.
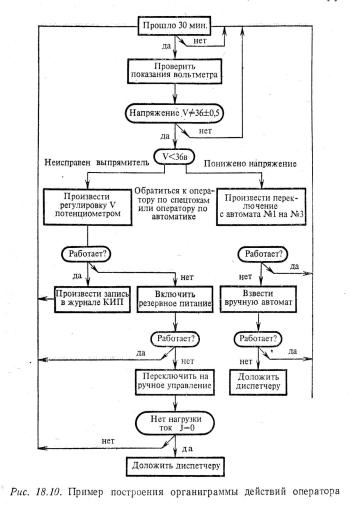
Большими преимуществами по сравнению с текстовыми документами являются и различные варианты алгоритмических языков описания действий оператора. К ним относятся: символическая запись операций, язык эксплуатационных действий ЯЗЭД, язык описания действий оператора в непрерывных технологических процессах ЯЗОН и др. Опыт показывает, что составление инструкций с помощью таких языков приводит к уменьшению ее объема в 3–4 раза по сравнению с инструкцией, составленной обычным способом. Кроме того, обучение операторов по алгоритмическим инструкциям проходит быстрее, чем по обычным, при этом улучшаются результаты их работы и при выходе на стационарный уровень обученности.