

2.6 Дробовий факторний експеримент
Експеримент, в якому проводяться 2k дослідів, де k – кількість вхідних факторів, називається повним факторним експериментом (ПФЕ).
В теорії планування експерименту існують методи побудови частин планів ПФЕ, яким притаманні основні властивості ортогонального планування. Такі експерименти називають дробовими (ДФЕ).
ДФЕ є частиною ПФЕ. Якщо проводиться половина ПФЕ (замість Nk=2k дослідів проводиться половина, тобто ½Nk або 2к-1), то експеримент називається півреплікою ПФЕ; якщо проводиться ¼Nk=2к-2 дослідів, то експеримент називається четвертю репліки ПФЕ 2к і т.д.
Будь-які дробові репліки повинні мати властивості ортогональності, нормування та балансу (див. pозділ 2.5).
Дробові репліки значно зменшують кількість необхідних дослідів – наборів різних комбінацій факторів, - зокрема кількість дослідів можна зробити рівною кількості факторів.
План, в якому кількість дослідів дорівнює кількості коефіцієнтів регресії bі, називається насиченим.
Дробові репліки зручні для побудови лінійних моделей систем з великою кількістю вхідних факторів (при цьому апріорі повинно бути відомо, що ефекти взаємодії проявляються слабо), а також для дослідження багатофакторного простору в першому наближенні, коли поверхня відгуку мало відрізняється від гіперповерхні, тобто в області, де допустима лінеаризація.
2.7 Врахування нелінійності типу квадратів факторів
У тих випадках, коли поверхня відгуку має вигляд горба (або впадини), тобто коли функція відгуку має екстремум, рівняння моделі дещо ускладнюється – в ньому з`являються квадрати рівнів факторів:
![]() (2.19)
(2.19)
У випадку, якщо рівняння (2.17) незадовільно описує досліджувану систему і є потреба перейти до рівняння (2.19), весь експеримент не повторюють з самого початку, а лиш доповнюють план експерименту новими точками: одна з них знаходиться в центрі плану (хі=0), а інші, що називаються зірковими точками, знаходяться на осях хі на певній відстані від центру плану. На рис.2.4 показано розміщення точок такого експерименту для двох вхідних факторів (k=2). Зіркові точки відмічені кружками; величина називається зірковим плечем.
Загальна кількість дослідів збільшується від N=2к, до N=2k+2k+1, якщо система описується рівнянням (2.19); k – кількість вхідних факторів.

Рисунок 2.4 – Взаєморозміщення точок двофакторного експерименту і зіркових точок
Планування такого експерименту та обробка його результатів найкоротше викладені в роботі [2], а цікавий приклад наведений у додатку А.
2.8 Планування експерименту при пошуку оптимуму
Напевне, в більшості випадків потрібно визначить такі значення факторів, які забезпечують досягнення максимуму відгуку у. На значення факторів можуть накладатись певні обмеження.
Експерименти, що проводяться з метою досягнення максимуму чи мінімуму відгуку у, називаються екстремальними або оптимізаційними.
На першому етапі проводять багатофакторний експеримент в довільній області факторного простору.
На другому і наступних етапах здійснюється рух в точку оптимуму (екстремуму) одним із методів: градієнтним, найшвидшого спуску (підйому), випадкового (статистичного) пошуку і т.д. Одним із найчастіше використовуваних методів є видозмінений метод градієнта, який називається методом крутого сходження. На прикладі двофакторного експерименту розглянемо рух до точки у=уmах за допомогою цього методу.
Стратегію дослідження екстремуму пояснює рис. 2.5.
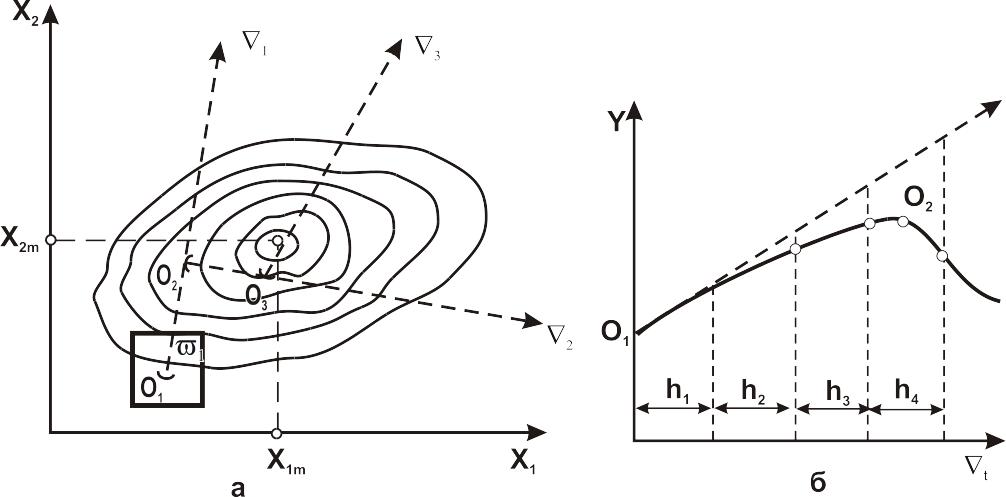
а – поверхня відгуку; б – переріз поверхні відгуку площиною, що проходить через вектор 1.
Рисунок 2.5 – Геометрична інтерпретація метода крутого сходження
На рис.2.5, а побудовані криві однакового рівня відгуку у=const. Після проведення експерименту в області отримуємо рівняння регресії, наприклад, у вигляді
y = x1 + x2. (2.20)
З цього рівняння визначаємо напрям градієнта:
![]() (2.21)
(2.21)
Будемо рухатись в напрямку вектора , починаючи з точки О1 (центр області ).
Для більшої наочності перетнемо поверхню відгуку вертикальною площиною, що проходить через вектор , і отримаємо криву, зображену на рис. 8.1б. З цього рисунка видно, що через декілька кроків h, в процесі яких вимірюється лиш відгук у (а нове значення градієнта не обчислюється), ми прийдемо в точку О2, після якої значення відгуку почне зменшуватися і в якій відгук у досягне найбільшого значення для даного напрямку.
Точка О2 стає центром плану для другої серії дослідів в області (на рисунку не виділена); далі обчислюються нові значення коефіцієнтів bі та новий напрям градієнта . По напрямку дійдемо до точки О3, в якій поставимо третю серію дослідів і обчислимо напрям градієнта , який і виводить нас в область максимуму. Тут завершується круте сходження і починається детальне дослідження відгуку в околицях максимуму. Це здійснюють за допомогою планування другого порядку (з врахуванням нелінійності типу квадратів факторів).
Примітка. Оптимізація системи за наявності ряду обмежень (умов) може здійснюватись також симплекс-методом [2, 4].