

2. Управляемость автомобиля и безопасность движения
Движение системы “водитель-автомобиль” считается устойчивым, если при воздействии на автомобиль ограниченных по величине возмущающих воздействий, его отклонения от заданного закона движения не превысят допустимых на определенном отрезке величии. В автомобилестроении под управляемостью понимается устойчивость движения системы “водитель-автомобиль”, а под устойчивостью - собственная устойчивость автомобиля как объекта управления.
Закон движения характеризуется траекторией и скоростью движения автомобиля. Траектория и допустимые отклонения от нее определяются планом дороги, шириной проезжей части, габаритами самого автомобиля и габаритами других транспортных средств, размещением их на проезжей части.
Управляемость оценивают по соответствию параметров движения автомобиля воздействиям водителя на рулевое управление. При различных воздействиях степень соответствия может быть различной, что затрудняет выбор единого критерия для комплексной оценки управляемости автомобиля в эксплуатационных условиях.
Поворачивая рулевое колесо, водитель задает новое направление движению автомобиля. При плохой управляемости автомобиля действи-телыюе направление движения не совпадает с желательным и необходимы дополнительные управляющие воздействия со стороны водителя. Это приводит к “рысканию” автомобиля по дороге, увеличению динамического коридора и утомлению водителя. При особенно неблагоприятных условиях плохая управляемость может явиться причиной столкновения автомобилей, наезда на пешехода или выезда за пределы дороги.
Так как боковая сила не может превысить силу оцепления шин с дорогой или величину, необходимую для опрокидывания автомобиля, то заданная траектория определяет безопасную скорость движения.
В связи с тем, что водитель выбирает скорость и оптимальную траекторию на основании прогнозирования перемещений своего автомобиля и автомобилей других участников движения, задача выбора безопасной скорости значительно осложняется, что способствует возникновению аварийных ситуаций и является причиной многих ДТП.
Ухудшение управляемости, приводящее к созданию аварийных ситуаций, всегда увеличивает поток осведомительной информации о реакциях автомобиля на управление и требует изменения алгоритма управления, что затрудняет возможность правильной оценки дорожной обстановки и снижает безопасность движения. Поэтому изучение поведения автомобиля в аварийных ситуациях является крайне необходимым.
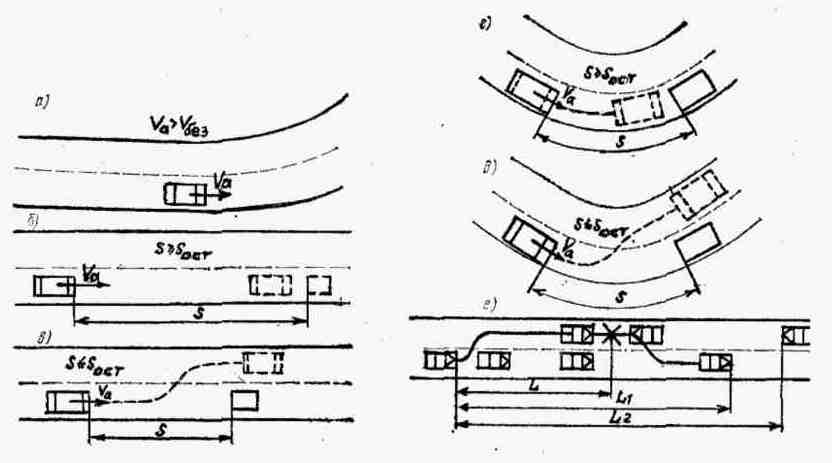
Рис.1.1 Схема аварийных ситуаций, вызванных возмущающим воздействием, приложенным к водителю:Превышение безопасной по условиям движения скорости Vбез
а-на входе в поворот; б-по остановоному пути на прямой
С позиции теории управления аварийные ситуации можно разделить на:
а) ситуации, вызываемые заданным законом движения, когда возмущающее воздействие приложено к регулятору (водителю), причинами которых являются: превышение безопасной скорости на входе в поворот, появление препятствия при прямолинейном или криволинейном движении; превышение заданной величины ускорения над возможной по условиям сцепления или тяговым свойствам автомобиля;
б) ситуации, вызываемые возмущающим воздействием, приложенным к объекту управления (автомобилю) в результате возникновения боковых сил, вызванных воздействием: бокового ветра, боковой составляющей силы тяжести на поперечном уклоне, неровностей дорожного покрытия, технических неисправностей автомобиля. Схемы перечисленных аварийных ситуаций показаны на рисунках 1.1 и 1.2.

Рис. 1.2. Схемы аварийных ситуаций, вызванных возмущающим воздействием,приложенным к автомобилю (объекту управления):
Превышение безопасной скорости:
а — при действии бокового ветра; б - при действии боковой составляющей силы; Fу - тяжести (от поперечного уклона дороги);
в - при движении по неровной дороге или технических неисправностях автомобиля; Vа- скорость автомобиля; vв - скорость бокового ветра; Мо - поворачивающий момент
3. Увод эластичного колеса и поворачиваемосгь автомобиля
Одной из характеристик управляемости автомобиля является его
поворачиваемость.
Поворачиваемостью называют свойство автомобиля изменять направление движения без поворота управляемых колес. Есть две основные причины поворачиваемости: увод колес, вызываемый поперечной эластичностью шин, и поперечный крен кузова, связанный с эластичностью подвески. Соответственно различают шинную и креновую поворачиваемость автомобиля.
Свойство автомобиля менять направление движения из-за увода эластичных шин без поворота управляемых колес называют шинной по-ворачиваемостью.
Уводом называют качение колеса под углом к своей плоскости. При действии на колесо с эластичной шиной поперечной силы Ру вектор скорости центра колеса отклоняется от плоскости вращения на некоторый угол δ - угол увода. Сила Ру и угол увода δ связаны следующей зависимостью:
Ру=kув x δ (1.1)
где kув- коэффициент сопротивления уводу (первая производная от поперечной силы по углу увода), H/рад.
Величина kув зависит от многих факторов, из которых наибольшее значение имеют величина угла увода, вертикальная и касательная силы, приложенные к колесу, и наклон колеса к вертикали.
Под действием боковой нагрузки (Ру) на автомобиль с эластичными шинами векторы скоростей центра осей отклоняются от плоскости вращения колес на некоторые углы δи δ, как показано на рисунке 1.5. Из-за увода колес передней и задней осей автомобиль приобретает тенденцию смещаться от прямолинейного движения и поворачиваться относительно центра О, расположение которого определяется точкой пересечения перпендикуляров к плоскостям качения колес.
При повороте автомобиля с эластичными шинами центр поворота О1 смещается относительно центра поворота автомобиля с жесткими шинами, как это видно на рисунке 1.4. С учетом малости углов поворота и увода δи δ, можно определить радиус поворота автомобиля с эластичными шинами:
![]()
 (1.2)
(1.2)
Из формулы (1.2) видно, что траектория движения автомобиля с эластичными шинами может существенно отличаться от траектории движения автомобиля с жесткими шинами. При наличии увода кривизна траектории (как при повороте рулевого колеса, так и при нейтральном его положении) зависит от соотношения углов увода δи δ.
Если δ= δ., то шинную поворачиваемость называют нейтральной. Согласно формуле (1.2), траектория движения автомобиля с эластичными шинами не совпадает с траекторией движения автомобиля, имеющего жесткие шины. При нейтральном положении рулевого колеса под действием боковой силы автомобиль, имеющий эластичные шины, движется поступательно, но под углом к исходному направлению (рис. 1.4б).
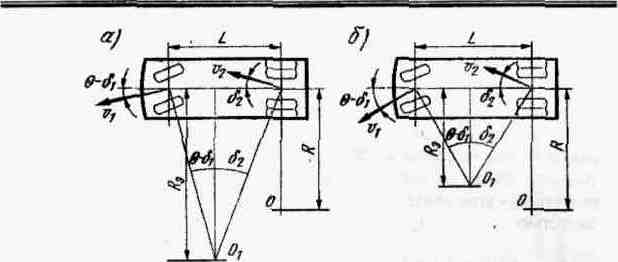
Рис. 1.4. Изменение расположения центра поворота Rз, автомобиля с эластичными шинами
(жесткими шинами - О): а - недостаточная поворачиваемость; б – нейтральная пворачиваемость;
в - избыточная поворачиваемость
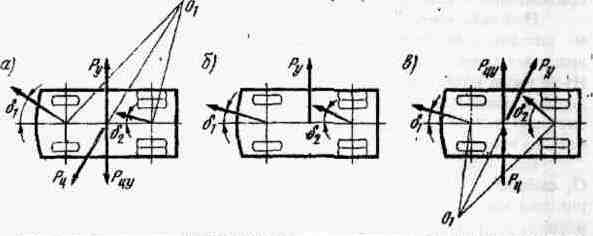
Рис. 1.5. Изменение напраиленин центробежной силы в зависимости от типа иоворачнваемости:
а- недостагочная поворачиваемосгь;б — нейтральная поворачиваемость; в - избыточная поворачиваемость
Если
δ>
δ,
то шинную поворачиваемость называют
недостаточной, так как Рэ>R
(рис. 1.4а) и для движения автомобиля по
кривой с радиусом R
управляемые колеса нужно поворачивать
на угол больший, чем![]() .
При
=0
автомобиль стремится повернуться
относительно центра О(рис. 1.5а), вызывает
центробежную силу Рц,
поперечная составляющая которой
Рцyуменьшает
величину боковой силы Ру
и увод колес. Следовательно, автомобиль,
обладающий недостаточной шинной
поворачиваемостью, имеет хорошую
курсовую устойчивость.
.
При
=0
автомобиль стремится повернуться
относительно центра О(рис. 1.5а), вызывает
центробежную силу Рц,
поперечная составляющая которой
Рцyуменьшает
величину боковой силы Ру
и увод колес. Следовательно, автомобиль,
обладающий недостаточной шинной
поворачиваемостью, имеет хорошую
курсовую устойчивость.
Если δ< δ, то шинную поворачиваемость называют избыточной, так как Рэ<Р (рис. 1.4б) и для движения автомобиля по кривой с радиусом R управляемые колеса нужно поворачивать на угол меньший, чем .
При =0 автомобиль, поворачиваясь относительно центра О(рис. 1.5в), вызывает центробежную силу Рw, поперечная составляющая которой Рцу совпадает по направлению с боковой силой Ру, увеличивая увод колес и кривизну траектории. Если водитель своевременно не повернет колеса в нужном направлении, то в результате прогрессирующего увода центробежная сила возрастет настолько, что автомобиль потеряет устойчивость.
Оценка шинной поворачиваемости производится по коэффициенту поворачиваемости:
![]() =
=
где G1 и G2 - вертикальные нагрузки, приложенные к передней и задней осям автомобиля;
kув1 и kув2- коэффициенты сопротивления уводу передней и задней осей автомобиля.
При избыточной шинной поворачиваемости ηпов>1, при нейтральной ηпов=1, а при недостаточной ηпов < 1.
Шинная поворачиваемость автомобиля изменяется с изменением нагрузки. Для автомобилей в ненагруженном состоянии шинная поворачиваемость недостаточная, а в нагруженном - избыточная. Для того чтобы получить недостаточную шинную поворачиваемость, давление в шинах передних колес незначительно уменьшают по сравнению с давлением в шинах задних колес. Кроме того, по возможности нужно стремиться центр тяжести автомобиля смещать в сторону передней оси. Следует иметь в виду, что при движении колеса с боковым уводом коэффициент сцепления φх уменьшается по сравнению с качением без увода.
Таким образом, автомобиль с недостаточной поворачиваемостыо более устойчив и лучше сохраняет направление движения, чем автомобиль с избыточной поворачиваемостью.
4. Курсовая устойчивость автомобиля
Траектория движения автомобиля всегда является криволинейной, причем кривизна ее непрерывно меняется. Поэтому прямолинейное движение автомобиля - понятие условное, подразумевающее, что при неизменном направлении движения смещения его не превосходят некоторых пределов.
Курсовой устойчивостью автомобиля называют его свойство двигаться без корректирующих воздействий со стороны водителя, т.е. при неизменном положении рулевого колеса. Автомобиль с плохой курсовой устойчивостью произвольно меняет направление движения (“рыскает” по дороге), создавая угрозу другим транспортным средствам и пешеходам, и требует от водителя постоянных корректирующих действий с целью удержания автомобиля на полосе движения.
Нарушение поперечной устойчивости при прямолинейном движении (курсовой устойчивости) можег быть вызвано следующими причинами:
действием боковых сил (ветра, поперечной составляющей массы и др.);
- моментом, создаваемым различными по величине тяговой или тормозной силами на колесах левого и правого борта;
- буксованием или скольжением колес одного борта;
- резким разгоном, торможением или поворотом управляемых колес;
- неодинаковой регулировкой колесных тормозов;
- неисправностью в рулевом управлении (большой люфт, заклинивание);
- разрывом шин и др.
Автомобиль с плохой курсовой устойчивостью занимает полосу, существенно превышающую габаритную ширину Ва. “Рыскание” по дороге требует от водителя постоянных корректирующих действий с целью удержания автомобиля на полосе движения.
Показателями курсовой устойчивости служат средняя скорость поперечного смещения Vу ср и средняя угловая скорость поворота рулевого колеса ωрх.
Часто предпосылкой потери устойчивости является скорость автомобиля, не соответствующая дорожным условиям. Если автомобиль движется с излишне высокой скоростью, то тяговая сила Рт приближается по величине к силе сцепления Рсц ведущих колес с дорогой, вследствие чего возможно их пробуксовывание.
Условие отсутствия буксования:
Рсц ≥РТ (1.8)
Условие курсовой устойчивости автомобиля при равноускоренном движении на подъем, полученное из условия (1.8), может оцениваться максимально возможной его скоростью без пробуксовки ведущих колес с помощью неравенства:
![]()
где ωв - величина, учитывающая сопротивление воздуха;
![]() -
расстояние от передней оси до
центра
тяжести автомобиля;
-
расстояние от передней оси до
центра
тяжести автомобиля;
i - продольный уклон дороги;
![]() вр-
коэффициент вращающихся масс автомобиля.
вр-
коэффициент вращающихся масс автомобиля.
Скорость Vбук уменьшается при уменьшении коэффициента сцепления, росте сопротивления дороги, а также при увеличении ускорения. Поэтому потеря курсовой устойчивости автомобилем наиболее вероятна на участках дороги со скользким неровным покрытием (укатанный снег, обледенелый асфальтобетон, булыжник) и подъемами. Часто водители, видя впереди подъем и не желая терять скорости, увеличивают подачу топлива и преодолевают подъем “с ходу”. Если при этом на пути встретится участок, покрытый снежной или ледяной коркой, то значения сил PТ и Pсц могут стать примерно одинаковыми, тогда даже небольшая поперечная сила может вызвать боковое скольжение заднего моста.
Движение автомобиля со скоростью, близкой к Vбук является лишь одной из предпосылок заноса. Теоретически автомобиль может двигаться с этой скоростью неограниченно долго без потери поперечной устойчивости. Однако в реальных условиях всегда имеются возмущающие силы и моменты, стремящиеся изменить направление движения автомобиля. При малых скоростях влияние этих возмущений невелико, но в случае большой скорости они могут привести к нарушению курсовой устойчивости и заносу автомобиля. При движении автомобиля по неровной дороге со скоростью, близкой к максимально допустимой, наезд колеса на впадину или выступ приводит к изменению вертикальных реакций, а в некоторых случаях и к отрыву колеса от дороги. Таким образом, хотя большая скорость автомобиля не может сама по себе вызвать нарушение курсовой устойчивости, однако она усиливает влияние неблагоприятных факторов, увеличивая вероягность опасных последствий.
Вместе с тем водитель обычно имеет возможность уменьшить силу тяги, изменив положение дроссельной заслонки. Поэтому начавшееся буксование колес приводит к аварии только в результате неправильных или несвоевременных действий водителя.
5. Поперечная устойчивость автомобиля
Потеря поперечной устойчивости при криволинейном движении может привести к прогрессивно нарастающему поперечному скольжению шин по дороге (заносу) или опрокидыванию автомобиля. “Рыскание” автомобиля на криволинейных участках дороги обычно не наблюдается, поскольку скорости при этом относительно невелики.
При криволинейном движении автомобиля потерю устойчивости обычно вызывает центробежная сила. Для ее определения рассмотрим схему движения автомобиля на повороте (рис. 1.6a). Примем для простоты, что автомобиль является плоской фигурой, а увод и скольжение колес отсутствуют.
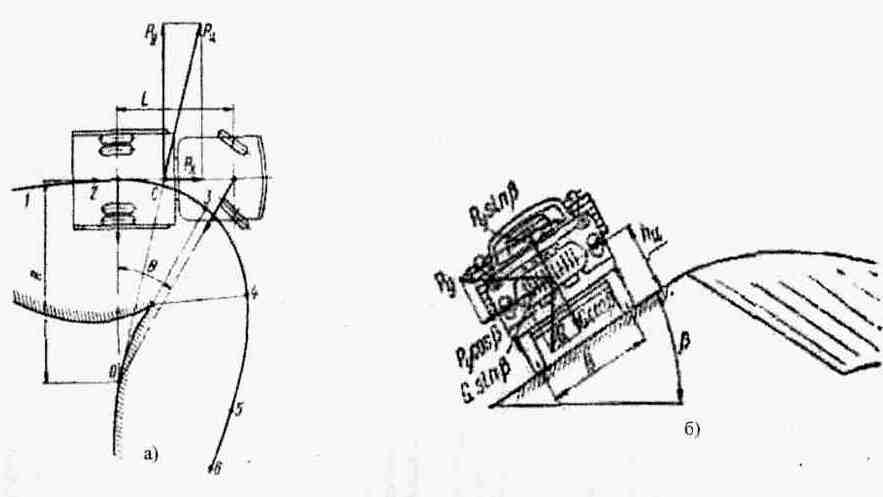
Рис. 1.6.Криволинейное движение автомобиля:
а - схема поворота автомобиля;
б - движение автомобиля на вираже
На участке дороги 1-2 автомобиль движется прямолинейно, его управляемые колеса находятся в нейтральном положении. На участке 2-3 водитель поворачивает рулевое колесо, и автомобиль движется по кривой уменьшающегося радиуса. На участке 3-4 положение управляемых колес, повернутых на угол в, остается неизменным, и автомобиль движется по дуге окружности. На участке 4-5 водитель поворачивает рулевое колесо в обратную сторону, и радиус траектории увеличивается. На участке 5-6 =0, и автомобиль снова движется прямолинейно.
Мгновенный центр О скоростей (центр поворота) автомобиля располагается в точке пересечения перпендикуляров к векторам скоростей средних точек мостов. При отсутствии увода и скольжения колес вектор скорости середины заднего моста параллелен плоскостям задних колес, поэтому точка О находится на продолжении оси заднего моста.
Расстояние от точки О до середины заднего моста при ≤ 20°;
R=L/tg ≈ L/ . (1.10)
Если скорость автомобиля и угол поворота передних колес постоянны, то величина определяет и радиус траектории середины заднего моста. В более общем случае ( ≠const и V≠const) радиус кривизны траектории и расстояние до мгновенного центра скоростей могут существенно различаться.
Центробежную силу Рц, приложенную в центре тяжести С автомобиля, можно разложить на две составляющие: продольную силу и поперечную Ру Для безопасности движения основное значение имеет сила Ру, стремящаяся вызвать поперечное скольжение и опрокидывание автомобиля.
На рисунке 1.6 а показаны силы, действующие на автомобиль при криволинейном движении по горизонтальному участку дороги. Равно-действующая центробежных сил Рц. приложена к центру тяжести автомобиля. Ее составляющая Ру, перпендикулярная оси автомобиля,
стремится вызвать занос или опрокидывание. При неравномерном движении по дуге переменного радиуса сила Ру представляет собой сумму трех составляющих:
Ру= Ру′+ Ру″+ Ру′″ (1.11)
Второй член формулы (1.11) зависит от скорости вращения рулевого колеса. При входе в поворот >0, и центробежная си.ча Рц растет, а при выходе - < 0 и центробежная сила Рц уменьшается, что позволяет увеличить скорость автомобиля.
Третий член формулы (1.11) увеличивает силу Ру при движении автомобиля с ускорением. При постоянной скорости движения Ру = 0. Для большинства транспортных средств при типовых эксплуатационных режимах Ру и Ру составляют не более 3-5% величины Ру. Поэтому силуРу. При углах поворота <20° определяют по формуле:
 (1.12)
(1.12)
Показателями поперечной устойчивости автомобиля при криволинейном движении являются максимально возможные скорости движения по дуге окружности и угол поперечного уклона дороги (косогора). Оба показателя могут быть определены из условий заноса или опрокидывания автомобиля.
Выше было принято, что автомобиль представляет собой твердое тело. В действительности автомобиль представляет собой сложную систему масс с шарнирами и упругими связями. В данном случае получаем:
 ,
,
где
![]() -
коэффициент,
учитывающий поперечный крен подрессоренных
масс из-за деформации упругих элементов
подвески (рессор, шин). Для грузовых
автомобилей и автобусов
=
0.85..0,95.
-
коэффициент,
учитывающий поперечный крен подрессоренных
масс из-за деформации упругих элементов
подвески (рессор, шин). Для грузовых
автомобилей и автобусов
=
0.85..0,95.
6. Продольная устойчивость автомобиля
Потеря автомобилем продольной устойчивости выражается, как правило, в буксовании ведущих колес, особенно часто наблюдаемом при преодолении автопоездом затяжных подъемов со скользкой дорожной поверхностью. Опрокидывание автомобиля в продольной плоскости возможно лишь как исключение. Показателями продольной устойчивости автомобиля служат максимальные величины углов подъема, преодолеваемого транспортным средством без буксования ведущих колес.
Нарушение продольной устойчивости проявляется в виде буксования ведущих колес автомобиля (тягача автопоезда) при динамическом преодолении затяжных подъемов. В таких случаях запас кинетической энергии автомобиля (тягача) может быть израсходован еше до конца подъема и сумма сил сопротивления окажется большей, чем сила сцепления. В результате может произойти сползание транспортного средства назад.
Показателями продольной устойчивости автомобиля служат максимальные величины углов подъема, преодолеваемого транспортным средством без буксования ведущих колес.
Определим максимальный угол подъема αд, по которому автопоезд может двигаться без буксования. Не учитываем для упрощения силы Рн, Рк и Рв. Тогда из условий равновесия тягача после преобразований получим выражение для максимального (критического) угла подъема, при котором возможно равномерное движение автопоезда без буксования ведущих колес тягача:
 (1.20)
(1.20)
Согласно последнему выражению критический угол αбук в большой степени зависит от коэффициента сцепления и массы прицепа. Чем меньше величина φх и чем больше масса прицепа по сравнению с массой тягача, тем меньше αбук
Для одиночного автомобиля:
 (1.21)
(1.21)
Для автомобиля со всеми ведущими мостами сила сцепления равна
G.![]() и tg
бук=
и tg
бук=![]() .Такие
автомобили могут преодолевать без
потери продольной устойчивости весьма
крутые подъемы даже при мокром и скользком
покрытии.
.Такие
автомобили могут преодолевать без
потери продольной устойчивости весьма
крутые подъемы даже при мокром и скользком
покрытии.
Лекция № 5 (4 час.)
Тема: Показатели и характеристика устойчивости и управляемости транспортных средств
План
Характеристики установившегося кругового движения (II, с 28-31)
Характеристики неустановившегося кругового движения (II, с 31-32)
Характеристики реакций автомобиля на поворот рулевого колеса
(II, с 33)
Характеристики, определяемые при управлении автомобилем по замкнутой схеме (II, с 37)
Характеристики управляемости, построенные на реактивных силах и моментах (II, с 39-40)
Влияние конструктивных и эксплуатационных параметров на изменение устойчивости и управляемости АТС (II, с 40-41).