

Лекция № 1 (8 час.)
Тема: ТЯГОВАЯ ДИНАМИКА АВТОМОБИЛЯ
План
Виды ДТП при низких показателях скоростных свойств автомобиля (I, с 5).
Факторы, показатели и характеристики тягово-скоростных свойств автомобиля (I,с 5-6).
Тяговый и мощностной баланс (I, c 6-8).
Удельная мощность и характеристика двигателя (I, с 8-13).
Приемистость автомобиля (I, с 13-14).
Скоростные характеристики автомобиля (I, с 15-18).
Параметры трансмиссии автомобиля (I, с 19-20).
Влияние колес, подвесок и шин на БДД (I, с 20-21).
Влияние аэродинамики автомобиля на его свойства (I, с 21).
10. Определение параметров обгона (I, c 21-29).
11. Нормативные требования к тяговой динамике (I, с 30-31).
1. К характерным видам ДТП, связанным с низкими показателями
скоростных свойств автомобиля, можно отнести следующие: I
• столкновения автомобиля с недостаточной тяговой динамикой в процессе выполнения маневров и обгона со встречным АТС.
• столкновения (наезды) вследствие нестабильности скорости движения транспортного потока;
• столкновения при объезде препятствий в условиях выезда на полосу встречного движения;
• столкновения вследствие падения скорости при движении на поворотах;
• столкновения вследствие падения скорости при движении на затяжных подъемах;
• столкновения вследствие снижения общей маневренности автомобиля с недостаточной тяговой динамикой и т.п.
Основными причинами недостаточной тяговой динамики автомобиля могут быть: низкая удельная мощность, повышенные тепловые и механические потери двигателя, низкий КПД трансмиссии, повышенные потери на качение, плохая обтекаемость кузова, высокие инерционные потери и т. п. Поэтому логически вытекает требование по БДД, чтобы различные модели АТС имели близкие по своим значениям и достаточно высокие показатели тягово-скоростных свойств.
В условиях эксплуатации не допускается существенное снижение этих показателей. Причем даже для разных типовых групп АТС
желательно иметь близкие показатели этих свойств.
2. Факторы, показатели и характеристики тягово-скоростных свойств автомобиля
К основным факторам (показателям и характеристикам) ТСС автомобиля, влияющим на БДД относятся: тяговый и мощностной баланс, удельная мощность, приемистость, максимальные скорости и ускорения, путь и время разгона, характеристики шин, параметры трансмиссии и некоторые другие.
Тяговый и мощностной баланс - это зависимость тяговой силы или мощности на ведущих колесах автомобиля от скорости движения автомобиля на горизонтальной дороге с твердым и гладким покрытием.
Удельная мощность - это отношение максимальной (номинальной) мощности двигателя к полной массе автомобиля.
Приемистость - это способность автомобиля к наращиванию скорости на горизонтальной дороге при полном использовании мощности двигателя.
Максимальная скорость - скорость, развиваемая автомобилем на | горизонтальной дороге с твердым и гладким покрытием, при полном использовании мощности двигателя. Условная максимальная скорость определяется при тех же условиях - при разгоне автомобиля на пути 1000 м.
Максимальное ускорение - приращение скорости в единицу времени при разгоне автомобиля на горизонтальной дороге с твердым и гладким покрытием при полном использовании мощности двигателя.
Максимальное замедление - падение скорости в единицу времени при аварийном торможении автомобиля на горизонтальной дороге с твердым и гладким покрытием вплоть до его остановки.
Путь и время разгона - это измеренные величины пути и времени при разгоне автомобиля с места или в заданном диапазоне скоростей на горизонтальной дороге с твердым и гладким покрытием при полном
использовании мощности двигателя.
Рассмотрим влияние на БДД некоторых факторов тяговой динамики автомобиля.
3. Тяговый и мошностной баланс.
На графике (рис. 1.1) представлен мощностной баланс автомобиля: исходный (а) и относительный (б);
где тр*Nеmах=Nkmах - максимальная мощность двигателя, приведенная к ведущим колесам;
лтр - КПД трансмиссии; \/mах (о) - максимальная скорость на горизонтальной дороге (i=0), определяемая максимальной мощностью на ведущих колесах (горизонтальная линия) и суммарным сопротивлением движению (Nс); Vi - текущая (итая) скорость; Vmax(i) - максимальная скорость на заданном предельном подъеме; Nk/Nkmах - относительная мощность на ведущих колесах; V/Vmах - относительная скорость движения; I, II, III, IV - номера передач (ступеней) трансмиссии; Nс/Nkmах - относительная суммарная мощность сопротивлений движению; Nj/Nkmax - относительный запас мощности, используемый для разгона автомобиля с ускорением jр или для преодоления дополнительного сопротивления движению (подъем, препятствие). ;

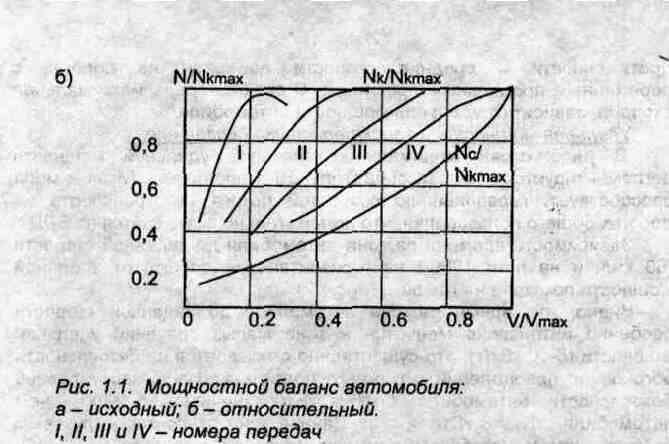
В целом о тягово-скоростных возможностях автомобиля (не зависимо от его типа: легковой, автобус, грузовой) можно судить по относительному мощностному балансу, где показан характер изменения мощности от скорости на различных передачах трансмиссии. Кроме того, им удобно пользоваться для построения мощностного баланса любого конкретного автомобиля. Для этого достаточно знать (задать) две исходных величины; Vmах и Nkmах (мощность на ведущих колесах). Текущие значения величин определяют по соотношениям:
V=Vотн • Vmах, Nk=Nотн • Nkmах.
Каждая кривая мощности на каждой передаче трансмиссии позволяет определить графически запас мощности Nj и суммарную мощность сопротивлений движению (см. рис. 1б),
Максимальная скорость автомобиля (см. Vmах (о) на рис. 1.1 а) определяется, исходя из максимальной мощности двигателя, в точке пересечения с кривой Nc суммарных сопротивлений движению. Чем больше величина максимальной скорости, тем выше средняя скорость движения автомобиля в различных условиях эксплуатации. Это, с одной стороны, как бы снижает безопасность дорожного движения, но с другой, повышает ее при обгонах, движении на подъемах большой протяженности, способствует выравниванию скоростей транспортных потоков и преодолению различного рода препятствий.
4. Удельная мощность и характеристика двигателя.
В ряде стран минимальное значение удельной мощности регламентируется в законодательном порядке. Такая мера способствует выравниванию скоростей потока автотранспорта на дорогах общего пользования, что положительно сказывается на БДД.
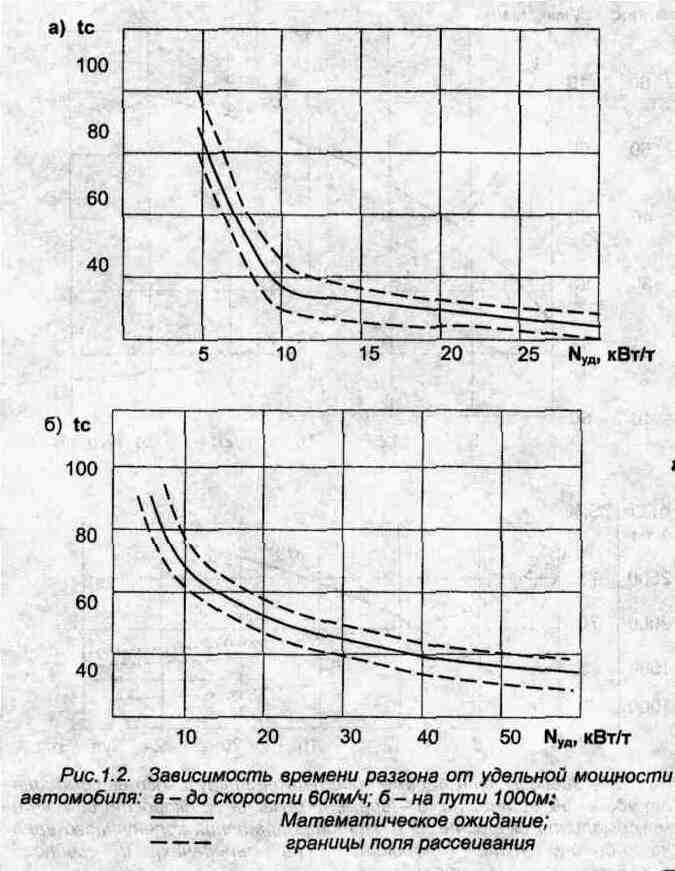
Зависимость времени разгона автомобиля до заданной скорости (60 км/ч и на пути 1000 м на горизонтальной дороге) от удельной мощности показана на графике (рис. 1.2).
Видно, что время разгона автомобиля до заданной скорости особенно интенсивно меняется в зоне малых значений удельной мощности
(5-10 кВт/т); это существенно сказывается на безопасности обгонов и преодолении затяжных подъемов. Например, уровень безопасности автомобиля с Nуд=5кВт/т значительно ниже, чем
9 автомобиля с Nуд=8 кВт/т и т. д. Данная зона относится к грузовым
автомобилям и автобусам с малой удельной мощностью. В зоне высоких значений Nуд (правое поле графика), принадлежащих к легковым автомобилям, время разгона до заданной скорости изменяется плавно, что не оказывает существенного влияния на БДД. Например, автомобили с Nуд=20 кВт/т по времени разгона мало отличаются от автомобилей с Nуд=30 кВт/т и т.д. Однако по времени разгона на пути 1000м это различие остается существенным.
На графике (рис.1.3) представлены зависимости некоторых параметров движения грузового автомобиля от удельной мощности:
времени разгона до скорости 60 км/ч, максимальной скорости и передаточного числа трансмиссии. Изменение этих параметров особенно существенно в зоне малых значений удельной мощности (4…12 кВт/т).
В зоне высоких значений (от 16 и более кВт/т) характеристики протекают более плавно, но влияние уд остается заметным. С точки зрения БДД важна именно первая зона. Это подтверждает целесообразность регламентации нижнего предела удельной мощности для обеспечения БДД.
Влияние таких факторов, как рабочий объем двигателя, турбонаддув, дефорсировка двигателя, мощностные потери, подчинено общей закономерности влияния удельной мощности. Если то или иное мероприятие повышает удельную мощность, то оно повышает и среднюю скорость автомобиля, а если же снижает Nуд, то снижает и среднюю скорость.
Существенное влияние на БДД оказывает приемистость автомобиля. Показатель приемистости j, в значительной степени зависит от скорости движения (при прочих равных условиях). Чем . ниже скорость движения, тем выше значение показателя j и наоборот. При малых скоростях движения значения приближаются к единице, а при высоких - к нулю. В связи с этим сравнительную оценку приемистости автомобилей по этому показателю целесообразно проводить только при одинаковой (заданной) скорости движения, причем значения этой скорости должны лежать в средней, а не в крайних зонах скоростного интервала.
Данный показатель может быть эффективно применен как для сравнительной оценки приемистости автомобилей, так и для выбора их мощностных параметров.
При проектировании новых или модернизации выпускаемых автомобилей значения коэффициентов N и j необходимо принимать по лучшим аналогам.
6.Скоростные характеристики автомобиля
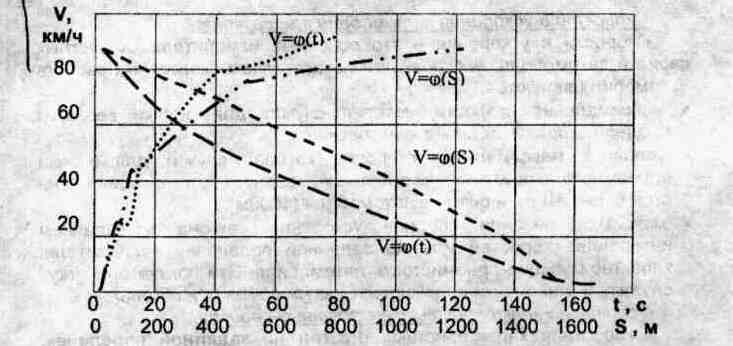
Рис. 1.6, Скоростная характеристика "Разгон - замедление"
Указанные зависимости могут быть получены экспериментальным путем при записи скоростного режима движения и соответствующей ее обработки.
В зависимости от полученных расчетных или экспериментальных данных среднюю скорость движения определяют по следующим выражениям:
- при наличии зависимости V=(S)
V=3,6*S/((Si / Vi) (1.1)
- при наличии зависимости V=(t)
V=3,6* (Vi*t/ti) (1.2)
- при наличии зависимости V=(S) и V=(t)
V=3,6*S/t (1.3)
Где V - средняя скорость движения, км/ч;
S - длина пройденного пути, м;
t - время движения, с;
n- число расчетных интервалов;
Si - длина элементарного участка пути, м;
ti - время движения на элементарном участке пути, с;
Vi - средняя скорость на элементарном участке пути, м/с.
Этими же выражениями можно пользоваться при подсчете средних скоростей циклического движения на дороге с горизонтальным продольным профилем.
Практически при дорожных (особенно полигонных) испытаниях, как правило, ведется запись на магнитную ленту параметров движения по пути и по времени. В этом случае подсчет V не составляет труда
(см. формулу 1.3)
Режим и эффективность разгона автомобиля характеризуются ускорением и косвенно путем и временем разгона в заданном интервале скоростей.
Ускорение разгона может быть рассчитано по уравнению:
jр=а/Vр-Ь/Vр2-с (1.4)
где а, Ь, с - постоянные коэффициенты, равные:
а=(Nеmах*тр*103)/(M); b=Wв (M); с=(g* )/
Здесь
-коэффициент учета вращающихся масс двигателя, трансмиссии и колес автомобиля;
М - полная масса автомобиля;
Wв - фактор обтекаемости автомобиля;
g - ускорение свободного падения;
- суммарный коэффициент сопротивления дороги.
Кривая ускорений, построенная по приведенному выше уравнению близка к гиперболе.
Такая же закономерность свойственна для огибающих кривых ускорений автомобилей с механической ступенчатой трансмиссией (рис. 1.7а), что становится более наглядным при представлении их в относительных координатах (рис. 1.7б). Видно, что экспериментальные точки относительных ускорений автомобилей разных типов (легкового, грузового автопоезда) образуют одну общую кривую.
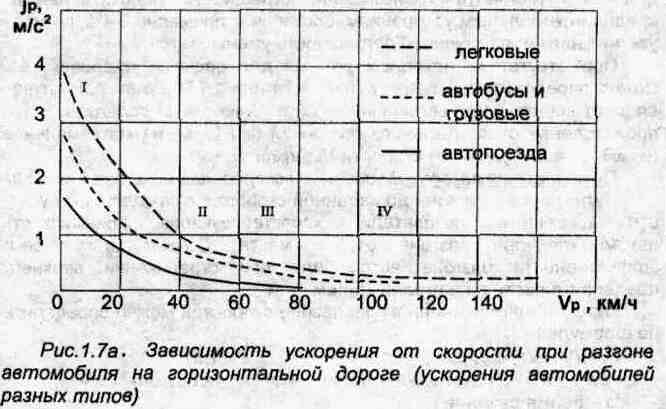
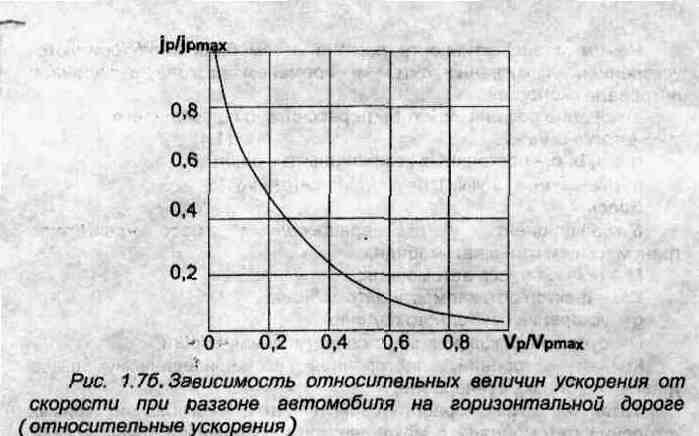
Расчетным анализом установлено, что для современных автомобилей со ступенчатой трансмиссией подсчет ускорений по приведенной формуле (1.4) не дает существенной ошибки. Например, для 4-х ступенчатой трансмиссии погрешность, подсчитанная по среднеинтегральным ускорениям, составляет примерно 2-4%; по мере увеличения числа ступеней погрешность уменьшается.
При отсутствии исходных данных для расчета ускорений, его можно определить по графику (рис. 1.7а или 1.76). Во втором случае следует задать две величины Jpmах и Vрmах, и определить jр как произведение относительного ускорения jр / jрmах) на максимальное
(jpmах) : jр =jротн* jрmах при СКОрОСТИ \/р=\/ротн'Vрmах.
Путь и время разгона до заданной скорости и на заданном пути
Путь и время разгона до заданной скорости и на заданном пути - это косвенные показатели, характеризующие приемистость автомобиля при разгоне его с места. Служат для оценки эффективности разгона автомобиля при ограничении верхнего предела скорости и на ограниченном пути.
Путь разгона в заданном диапазоне скоростей можно определить по формуле:
Sр=[(V1+V2)*tр/7,2; м (1.5)
Где vi и \/2- начальная и конечная скорости разгона, км/ч;
tр - время разгона, с.
tр - можно определить экспериментально и графически, в зависимости от удельной мощности (см. рис. 1.2)
7. Параметры трансмиссии являются важным условием эффективной реализации удельной мощности в различных условиях движения автомобиля. Рациональное сочетание параметров трансмиссии, в частности передаточных чисел, обеспечивает наиболее высокие средние скорости движения, преодоление подъемов и различного рода препятствий. К параметрам трансмиссии относятся ее диапазон, плотность ряда (число ступеней) и передаточные числа. При слишком широком диапазоне трансмиссии усложняется ее конструкция, управление и возрастает масса. При слишком узком диапазоне трансмиссии автомобиль теряет приспособляемость к профилю дорог, сопротивлениям движению, способствует снижению скоростей движения. При слишком малом числе ступеней снижается избирательность передач и средняя скорость движения, а при слишком большом - усложняется управление, возрастают потери времени на переключение передач, снижается средняя скорость движения, возрастает трудоемкость работы водителя. Установлено, что наиболее высокая эффективность работы достигается при использовании ряда передаточных чисел трансмиссии с прогрессивной плотностью (гармонический, гиперболический ряды).
Особая роль в рассматриваемом плане принадлежит передаточному числу главной передачи. Оно подбирается исходя из максимальной скорости автомобиля (по мощности двигателя) на прямой передаче в коробке передач. Подбирая главную передачу с различными передаточными числами и той же коробкой передач можно образовать ряд вариантов трансмиссии, удовлетворяющих потребностям целого семейства автомобилей с учетом их безопасности в различных условиях эксплуатации.
На графике (рис. 1.8) показана зависимость средней скорости дизельного автопоезда полной массой 39 т от передаточного числа Uо главной передачи при движении по магистрально-холмистой дороге. Видно, что наибольшие значения средней скорости автопоезда соответствуют Uо=4,5-5,5.
Полученные значения Uо очевидно будут благоприятны и исходя из условий БДД.
Из экспериментальных исследований следует, что при движении в более тяжелых дорожных условиях, в частности по горным дорогам, автомобиль менее чувствителен к изменению передаточного числа Uо. Это можно объяснить более равномерной загрузкой низких передач.
Исходя из теоретических предпосылок, с точки зрения БДД и скоростных свойств, наибольший эффект может обеспечить трансмиссия с автоматическим изменением передаточного числа в зависимости от изменения сопротивлений движению, так как в этом |случае более полно используется мощность двигателя и исключаются потери скорости при переключении передач.
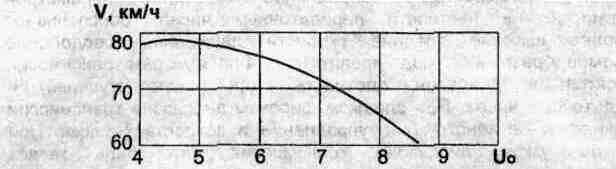
Рис. 1.8. Зависимость средней скорости от передаточного числа главной передачи при движении по магистрально-холмистой дороге автополигона
8. Колеса, подвеска и шины. Одно из важнейших качеств шин -сцепление с дорогой и сопротивление качению. Снижение коэффициента сопротивления качению по влиянию на скоростные свойства автомобиля равноценно снижению его полной массы. Поэтому снижение данного коэффициента, улучшение геометрических, жесткостных и сцепных характеристик шин - одна из наиболее эффективных мер повышения скоростных свойств автомобилей и БДД. Необходимо отметить, что при разработке конструкции шин велико стремление увеличить срок службы их за счет увеличения толщины протектора. Однако это неизбежно приводит к повышенным сопротивлениям качению и к ухудшению некоторых других характеристик. В ряде случаев потери в народном хозяйстве от перерасхода топлива могут значительно превысить ту экономию, которую мы ожидаем получить за счет увеличения срока ходимости шин. Отсутствие нормируемых показателей по сопротивлению качению, жесткостным и сцепным характеристикам отрицательно сказывается на качестве создаваемых конструкций шин.
Исходя из зарубежного опыта, прогрессивным направлением развития конструкции шин следует считать применение новых резинокордных материалов с повышенной прочностью и малыми гистерезисными потерями, в частности, шины с металлокордным брекерным поясом и кордом, образованным на основе специальных высокопрочных нитей.
Необходимо отметить недостаточную стабильность качества изготовления отечественных шин, особенно применительно к грузовым автомобилям. Результаты испытаний показывают, что на шинах одной и той же модели, изготовленных разными заводами, разница в их характеристиках вполне очевидна.
Для повышения качества шин необходимо дальнейшее усиление работ по шинной тематике, разработка научно-обоснованных требований автомобилестроителей к шинной промышленности.
9.Аэродинамика автомобилей.
Анализ опубликованных зарубежных и отечественных данных указывает на наличие больших резервов по увеличению скоростей движения автомобилей всех типов, за счет улучшения их аэродинамики. Так значения коэффициента обтекаемости у разных моделей автобусов различаются более чем в 2 раза, причем основная доля разницы приходится на форму кузова.
За счет снижения коэффициента обтекаемости может быть достигнута не только экономия топлива, но и повышение скоростей движения автомобилей.
При проектировании новых моделей автомобилей наблюдается в последний период тенденция создания специальных обтекаемых кабин и кузовов, что должно обеспечить более существенное снижение расхода топлива и повышение скоростей движения.
В обтекаемой кабине тягача, предназначенного для работы с прицепом, полуприцепом, обтекатели являются составными ее элементами и работают более эффективно, чем съемные.
Проведение таких работ на отечественных заводах немыслимо без проведения специальных экспериментальных исследований моделей и натурных образцов в аэродинамических установках, несмотря на то, что ряд требований к конструкции, связанных с обтекаемостью автомобилей, на сегодня известны (обтекаемые формы кабин и кузовов, наклон лобового и заднего стекол, выступы и ниши, шероховатость поверхности, зазоры, образующие завихрения и т.п.). Для проведения таких исследований в первом приближении могут быть использованы авиационные аэродинамические трубы. Но полностью это проблемы не решает. Для более эффективной доводки конструкции необходимо использовать автомобильную аэродинамическую установку НИЦИАМТ, не имеющую на сегодня достаточной загрузки.
Определение параметров обгона.
Обгон является важным маневром, который позволяет водителю автомобиля поддерживать оптимальную, по условиям задачи управления, среднюю скорость. Возможность выполнения обгона зависит от скорости обгоняемого А2 и скоростных свойств обгоняющего А1 автомобиля, наличия необходимого интервала во встречном потоке. Обгон может выполняться "схода" и "с ожиданием" возможности обгона, когда начальная скорость обгоняющего А1 автомобиля равна скорости обгоняемого А2 автомобиля. Последняя схема является наиболее типичной для сегодняшнего состояния автотранспортного потока (АТП). Обгон "схода", при отсутствии встречных автомобилей, наиболее прост. Обгон "с ожиданием" сложнее.
На рис. 1.9 представлена схема обгона "с ожиданием". Перед началом обгона водитель обгоняющего А1 следует за обгоняемым А2 автомобилем с временным интервалом t12, которому соответствует дистанция S12. В процессе обгона в определенный момент (в данном случае расчет ведется для положения 1.1, когда обгоняющий А1 догнал А2) водитель должен принять окончательное решение о завершении или прекращении обгона. В случае продолжения обгона А1 опережает А2 (см. 1.2 и 2.3) и возвращается на свою полосу движения (положения 2.3 и 1.2). В момент завершения обгона между обгоняемым и обогнавшим автомобилями должен быть временной интервал t21, которому соответствует дистанция S21, при этом встречный Аз автомобиль может свободно пройти по своей полосе. В последующие моменты времени интервал S21 быстро увеличивается, так как скорость у обгоняющего автомобиля выше, чем у обгоняемого.
Разгон автомобиля при обгоне должен выполняться с максимальной интенсивностью и прекращаться плавно после его завершения. Реализация такого режима возможна только в том случае, когда имеется необходимый интервал времени и запас пути между обгоняемым А2 автомобилем и автомобилем Аз, движущимся ему навстречу. (В противном случае водитель обгоняющего А1 автомобиля после завершения обгона будет вынужден экстренно затормозить.) Описанный режим движения обеспечивает минимальные значения пути и времени обгона по схеме
"с ожиданием". Значения времени обгона tобг, пути обгона Sобг и скорости обгоняющего А1 автомобиля в момент завершения обгона \/обг в зависимости от скорости обгоняемого А2 - определяют предельные условия, при которых обгон может быть завершен. ;

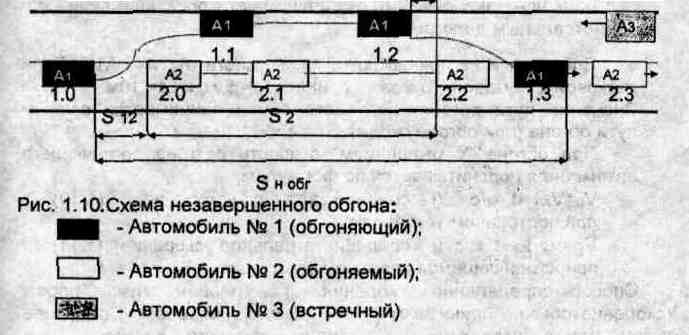
На рис.1.10 показана схема незавершенного обгона. В положении
1.1 водитель А1 принимает решение прекратить обгон. В положении
1.2 он притормаживает и отстает от обгоняемого автомобиля А2, а на дистанции примерно в один метр прекращает торможение и начинает перестраиваться в свой ряд; в этот момент обгоняемый автомобиль А2 уходит вперед, а автомобиль А1 возвращается на свою полосу движения, совершая маневр за время tп (время перестроения).
За это время А1 проходит путь Sп перестроение. Торможение выполняется с максимальным замедлением для данной категории АТС. Значения времени tобг и пути Sн.обг незавершенного обгона определяют предельные условия, при которых возможно избежать ДТП при незавершенном обгоне.
Сопоставление значений tобг и tн.обг, Sобг и Sн.обг позволяет оценить правильность выбора момента о возможности или невозможности завершить обгон.
Для того чтобы решение о прекращении обгона повышало безопасность (т.е. уменьшало вероятность столкновения со встречным автомобилем) по сравнению с решением продолжать обгон, необходимо, чтобы время и путь незавершенного обгона были меньше, чем при его завершении. Разница между этими значениями завершенного и незавершенного обгонов определяет величину резервов безопасности. Если резервы равны нулю или становятся отрицательными, то это означает, что решение о необходимости прекратить обгон надо было принимать раньше, чем обгоняющий автомобиль догонит обгоняемый АТС.
Условия завершения обгона можно записать в следующем виде:

прямой, либо на предшествующей (обгонной) передаче. При вычислении Vр при переменном ускорении рекомендуется использовать способ, описанный ниже, с помощью графика относительных ускорений
(рис. 1.11б).
Значения скорости Vр, при заданном интервале времени А1, можно определить также по формуле:
![]()
где Vmax-максимальная скорость обгоняющего АТС, км/ч;
t-текущее время, с;
Tv- постоянная времени разгона, с;
Определение пути разгона в этом случае можно определить по формуле:
 ,
м (1.12
,
м (1.12
Если процесс обгона длился в течении всего времени tобг, то Sобг=S1=Sр,м
Если нет, то следует учесть другие элементы пути S21, L1, L.2 согласно (1.6).
Описание графического способа определения параметров обгона начнем с ускорений разгона обгоняющего автомобиля
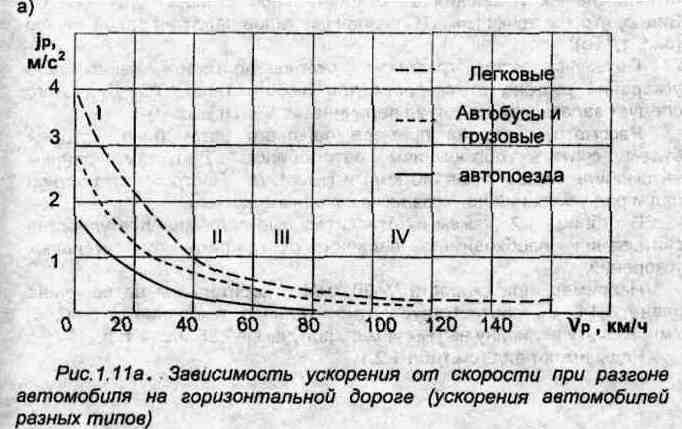
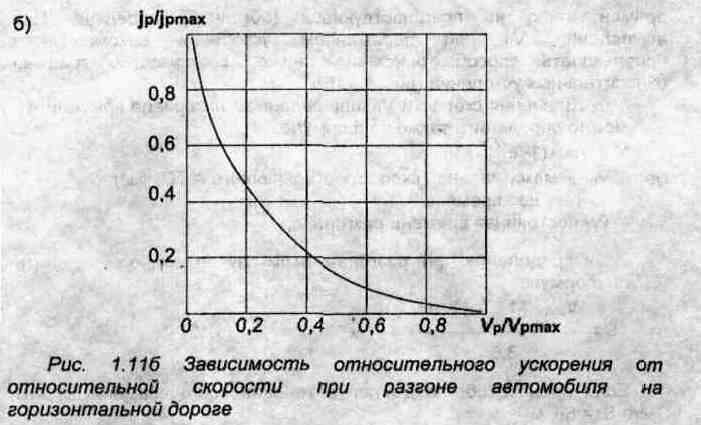
Статобработка ускорений разгона, выполненная на центральном автополигоне НАМИ, позволила получить универсальную зависимость ускорений разгона АТС различных типов от скорости разгона (1.11 а), и относительных ускорений от относительной скорости (рис. 1.116). Видно, что все точки jотн АТС различных типов лежат на одной кривой (рис. 1.116).
Пользуясь этим графиком, можно построить зависимость ускорений разгона от скорости для любого типа АТС. Для этого следует задаться лишь двумя величинами: Vmах и jmax
Рассмотрим это на примере легкового автомобиля, который будем считать обгоняющим автомобилем. Допустим, данный автомобиль имеет
\/mах=140 км/ч и jmax=4м/с2. Построим скоростной ряд и ряд ускорений по указанным исходным данным.
В таблице 1.2 укажем их относительные величины для удобства считывания необходимых величин с графика относительных ускорений.
Например, при скорости V=20 км/ч относительная ее величина равна 0,14. Ей соответствует относительное ускорение, jотн=0,46. Умножив эту величину на jmax=4 м/с2, получим j=1,85 м/с2 и т. д.
Ряды имеют вид: (см.табл.1.2.)
Таблица 1.2
|
|||||||||||||||
V,км/чч
|
0
|
10
|
20
|
30
|
40
|
50
|
60
|
70
|
80
|
90 '
|
100
|
110
|
120
|
130
|
140
|
VрNрmax
|
0
|
0,07
|
0,14
|
0,21
|
0,29
|
0,36
|
0,43
|
0,5
|
0,57
|
0,64
|
0,71
|
0,79
|
0,86
|
0,93
|
1,00
|
Jр. м/с2
|
0
|
2.7
|
1,85
|
1.6
|
1,2
|
088
|
0,56
|
0,48
|
0.32
|
0,24
|
0,20
|
0,1
|
0,02
|
0,01
|
0
|
Jр/Jpmax
|
0
|
0,68
|
0,46
|
0,40
|
0,30
|
0,22
|
0,14
|
0,12
|
0,08
|
0,06
|
0,05
|
0,025
|
0,005
|
0,002
|
0
|
По этим данным можно построить график ускорений, аналогичный представленному на рис. 1.11 а. Однако нам полный график не нужен, так как разгон обгоняющего автомобиля А1 задан со скорости \/2=60 км/ч, где ускорение равно 0,56 м/с2 табл. 1.2).
Параметры обгона.
Примем расчетный путь, заведомо достаточный для всех вариантов обгона, равным 320 м. (S=320). Обгоняемый автомобиль А2 путь пройдет за время (t=320/16*7= 19с. (здесь скорость в м/с);
Координаты его прямой “путь-скорость” равны: начало 30 м; 0 с; конец -320м, 19 с. (рис 1.12).
Первый. Обгон "сходу", со скоростью Vi =90 км/ч (25 м/с).
В этом случае время обгоняющего А1 автомобиля, t1=320/25=12,8 с. Следовательно, координаты последней точки его прямой "путь— скорость" равны: 320 м, 12,8 с., а начальной точки: Ом, Ос (начало координат). Момент обгона - точка А. Судя по положению этой точки, для обгона достаточно пути 100 м.
Второй. Обгон "с ожиданием", со средним ускорением 0,4 м/с2. В этом случае обгоняющий автомобиль А1, в конце расчетного пути достигает скорости, V1=16,7+0,4*19=24,3 м/с (87,5 км/ч). Средняя скорость V1=(16,7+24,3)/2=20,5 м/с (около 74 км/ч). Время разгона tр=320/20,5=15,6 с. Прямая "путь-скорость" проходит из начала координат к точке с координатами: 320 м, 15,6 с. Момент обгона соответствует точке В. Путь обгона примерно равен 160 м.
Третий. Обгон "с ожиданием", с реально изменяющимся ускорением. В данном случае рекомендуется пользоваться среднеинтегральным ускорением, определяемым по формуле трапеций
![]() =
((уо+уп)/2+у1+
...+уп
–1)/п
(1.13)
=
((уо+уп)/2+у1+
...+уп
–1)/п
(1.13)
п - число расчетных интервалов.
Величина его зависит от интервала скоростей. Если мы принимаем широкий интервал, например, 60-120 км/ч, то среднеинтегральное ускорение
![]() =((0,56+0,02)/2+0,48+0,32+0,24+0,20+0,01)/5=0,33
м/с2.
=((0,56+0,02)/2+0,48+0,32+0,24+0,20+0,01)/5=0,33
м/с2.
Тогда
скорость у А1 будет равна V"=16,7+0,33t.
В конце пути при t=19с.
(время движения А2),
![]() =16,7+0,33*19=23
м/с.
=16,7+0,33*19=23
м/с.
Средняя скорость V``=(16,7+23)/2=19,9 (71,6км/ч).
Время обгона t1"=320/19,9=16,1 с. Момент обгона -точка С.
В этом случае путь обгона составил бы около 190 м. Как видим на расчетном пути (320 м) обгоняющий А1 не достиг даже 72 км/ч. Поэтому принятый нами широкий скоростной интервал (60-120) следует считать ошибочным.
Если принять интервал 60-90 км/ч, то получим среднее ускорение
0,4 м/с2, то есть также, как в варианте втором.
Практически достаточен интервал 60-85 км/ч, которому соответствует среднее ускорение 0,44. В этом случае время обгона на пути 320 м составило бы 15,3 с (против 15,6 с во втором варианте).
Таким образом, по средним величинам ускорения и скорости считать очень удобно, но среднее ускорение следует выбирать внимательно, не допуская грубых ошибок. Не следует забывать также, что прямая “путь-время” автомобиля А2 (обгоняемого) берет начало от пути S2=S21 при =0, а не из начала координат (в нашем примере путь 21=30 м). А прямые обгоняющего А1 автомобиля - из начала координат.

Определение параметров обгона
Параметры обгона определяются с помощью построенного графика на рис. 1.12.
Параметры завершенного обгона:
Точка А - при обгоне схода:
So6r=SA+S21+Ll+L2 (1-14)
• to6r=tA+t21+tl-1+tL2 (1.15)
Точка В - при обгоне с ожиданием:
So6r=SB+S21 +L1+L2 (1.16)
• to6r=tB+t21+tL1+tL2 (1.17)
Параметры незавершенного обгона
Точка А - при обгоне схода:
Sнобг Sa (1.18)
tн обг tА (1.19)
Точка В - при обгоне с ожидание м:
Sн обг =Sа (1.20)
tн обг tа- (1.21)
Примем, что величина относительной погрешности
не должна превышать одного процента:
Для определения возможности избежать ДТП при решении прекратить обгон в соответствии со схемой, приведенной на рис. 1.10, определяются величины резервов времени tрез и пути Sрез по формулам:
t pез=to6r – tн обг, с (1-23)
S рез = Sобг - Sн обг, М (1.24)
Отрицательная величина результата означает отсутствие резервов и невозможность избежать ДТП путем торможения. Трудность правильного выполнения обгона в сочетании с высокой скоростью требует от водителя безошибочного расчета и точных действий по управлению автомобилем. Чем больше скорость автотранспортного потока, тем большая вероятность и тяжесть ДТП при обгоне. Важнейшее значение для безопасного выполнения обгона имеет приемистость автомобиля.
1.1. Нормативные требования к тяговой динамике
В настоящее время нормативная база по тяговой динамике разработана очень слабо, за исключением некоторых показателей, которые обычно указывают в ТУ на автомобиль (мощность двигателя, максимальная скорость, время разгона до заданной скорости и на заданном пути). Международными стандартами (в том числе Правилами ЕЭКООН) эти показатели пока не регламентируются.
Среди национальных стандартов в России действует ГОСТ 22576-90 “Автомобили и автопоезда. Номенклатура показателей скоростных свойств и методы их определения” (М.: издательство стандартов, 1990).
Данным ГОСТом установлены следующие показатели и характеристики скоростных свойств АТС:
• максимальная скорость;
• время разгона на заданном пути;
• время разгона до заданной скорости;
• скоростная характеристика “Разгон - выбег”;
• скоростная характеристика “Разгон на заданной передаче.
ГОСТом установлены условия и методы испытаний АТС при определении перечисленных показателей и характеристик.
В некоторых странах регламентируется только нижний предел удельной мощности АТС. На сегодня нормативная база по тяговой динамике нуждается в существенном пополнении и обновлении, так как выпускаемые промышленностью автомобили, обладающие различной максимальной скоростью и приемистостью, попадая на дороги общего пользования, создают взаимные помехи и нарушают равномерность общего потока автомобильного транспорта, тем самым не обеспечивают БДД.
Для устранения этого недостатка представляется целесообразным значения некоторых главных показателей регламентировать. Рекомендуемые авторами величины приведены ниже (табл. 1,3). Эти рекомендации учитывают тип, назначение автомобилей и условия их эксплуатации.
Введение таких ограничений способствовало бы выравниванию потоков грузового и легкового автотранспорта.
Отметим, что для практики испытаний удобнее и точнее определять время разгона на заданном пути, так как момент достижения заданной скорости не может быть зафиксирован с высокой точностью, причем требует применения записывающего прибора, в то время как в первом случае достаточно секундомера.
Наряду с этим в ТУ отсутствует такой важный, на наш взгляд, показатель как скорость движения на заданном основном подъеме
(5%), которая оказывает существенное влияние на равномерность потоков автотранспортных средств. В перечне рекомендуемых показателей (см. табл. 1.3) этот недостаток устранен.
Кроме того, введены показатели – скорость на максимальном уклоне и коэффициент приемистости.Рекомендуемые значения показателей скоростных свойств должны учитываться при составлении нормативно-технической документации конкретных моделей автомобилей (автопоездов), а также при разработке типажа АТС.
Таблица 1.3
Рекомендуемые значения показателей тяговой динамики_______
Показатели
|
Легковые автомобили
|
Автобусы
|
Грузовые автомобили
|
|||||||
|
особо малого класса
|
малого класса
|
средне-ro класса
|
межаугородниеи туристские
|
городские
|
ПОЛ 110- приаодн-ые
|
непол-ноприв-одные
|
автопоезда
|
||
Продольный
|
уклон, %'. |
|||||||||
основной
|
5
|
5 •
|
5
|
5
|
5
|
5
|
5
|
5
|
||
максимальный
|
35
|
35
|
35
|
20
|
20
|
60
|
25
|
18
|
||
Удельная мощность (кВт/т), не менее
|
50
|
50
|
SO
|
15
|
10
|
12
|
12
|
6 .
|
||
Максимальная скорость (км/ч), по мощности
|
двигателя, не менее:
|
|
|
|||||||
на горизонтальной дороге
|
130
|
140
|
150
|
100
|
80
|
80
|
90
|
80
|
||
на основном уклоне* |
100
|
120
|
125
|
40
|
40
|
40
|
45
|
25
|
||
На максимальном уклоне*
|
25
|
25
|
30
|
12
|
12
|
5
|
12
|
8
|
||
Показатель приемистости при скорости 60 км/ч не менее:
|
0,70
|
0,72
|
0,75
|
0,55
|
0,55
|
0,50
|
0,50
|
0,36
|
||
Время разгона с места до скорости
|
(км/ч):
|
|||||||||
60, не более (с)
|
-
|
-
|
-
|
40
|
37
|
40
|
40
|
75
|
||
100, не более (с)
|
20
|
18
|
15
|
|
|
|
|
|
||
Время разгона с места на пути 1000м, не более(с)
|
44
|
42
|
40
|
70
|
70
|
70
|
70
|
82
|
||
Примечание: *'величины основного и максимального уклонов.
Таблица 1.3
Рекомендуемые значения показателей тяговой динамики_______
Показатели
|
Легковые автомобили
|
Автобусы
|
Грузовые автомобили
|
|||||||
|
особо малого класса
|
малого класса
|
средне-ro класса
|
межаугородниеи туристские
|
городские
|
ПОЛ 110- приаодн-ые
|
непол-ноприв-одные
|
автопоезда
|
||
Продольный
|
уклон, %'. |
|||||||||
основной
|
5
|
5 •
|
5
|
5
|
5
|
5
|
5
|
5
|
||
максимальный
|
35
|
35
|
35
|
20
|
20
|
60
|
25
|
18
|
||
Удельная мощность (кВт/т), не менее
|
50
|
50
|
SO
|
15
|
10
|
12
|
12
|
6 .
|
||
Максимальная скорость (км/ч), по мощности
|
двигателя, не менее:
|
|
|
|||||||
на горизонтальной дороге
|
130
|
140
|
150
|
100
|
80
|
80
|
90
|
80
|
||
на основном уклоне**
|
100
|
120
|
125
|
40
|
40
|
40
|
45
|
25
|
||
На максимальном уклоне*
|
25
|
25
|
30
|
12
|
12
|
5
|
12
|
8
|
||
Показатель приемистости при скорости 60 км/ч не менее:
|
0,70
|
0,72
|
0,75
|
0,55
|
0,55
|
0,50
|
0,50
|
0,36
|
||
Время разгона с места до скорости
|
(км/ч):
|
|||||||||
60, не более (с)
|
-
|
-
|
-
|
40
|
37
|
40
|
40
|
75
|
||
100, не более (с)
|
20
|
18
|
15
|
|
|
|
|
|
||
Время разгона с места на пути 1000м, не более(с)
|
44
|
42
|
40
|
70
|
70
|
70
|
70
|
82
|
||
Примечание. *'величины основного и максимального уклонов.
Лекция № 2 (4 час.)
Тема: ТОРМОЗНАЯ ДИНАМИКА АВТОМОБИЛЯ (4 часа)
План
Тормозные системы автомобилей и требования БДД к ним (I, с 32-33).
Измерители, показатели и характеристики тормозных свойств автомобиля (I, с 33-39).
Испытания АТС на тормозную динамику (I, с39-41)
1.Тормозная динамика автомобиля - это свойство автомобиля обеспечивать возможность регулирования (снижения) скорости автомобиля для его экстренной остановки и удержания автомобиля на месте. Тормозные свойства автомобиля - это одно из основных свойств обеспечения активной безопасности, т.е. свойство, за счет которого предотвращается ДТП.
При 65% всех ДТП используется торможение, из них половина ДТП происходит при торможении на мокрых и скользких покрытиях. Более 30% всех ДТП можно было бы исключить за счет своевременного и более эффективного торможения.
Современные автомобили оборудуются четырьмя видами тормозных систем (ТС): рабочей (основной) ТС, запасной, стояночной и вспомогательной ТС.
Рабочая тормозная система является основной и предназначается для регулирования скорости автомобиля в любых условиях движения в т.ч. для служебного и экстренного (аварийного) торможения.
Запасная система предназначена для повышения надежности ТС и используется в случае отказа рабочей системы.
Стояночная ТС - для удержания неподвижного автомобиля на месте
(на стоянке), в том числе на уклоне. .
Вспомогательная ТС необходима для поддержания скорости автомобиля постоянной в течении длительного времени (например, на спусках).
Служебное торможение - это плавное торможение с замедлением до 3 м/с2 (0,3g); экстренное (аварийное) - это резкое уменьшение скорости с замедлением более 0,3g (до 9м/с2 и более).
С позиций обеспечения безопасности дорожного движения основную роль играет экстренное торможение, которое обеспечивается рабочей тормозной системой.
Виды ДТП, на вероятность которых оказывает основополагающее влияние тормозная динамика автомобиля - это разнообразные виды наездов на препятствия и столкновения автомобилей.
Анализ ДТП, совершенных с недостаточной эффективностью ТС автомобилей, позволил сформулировать следующие обобщенные требования БДД и ТС:
• обеспечиваемый ТС тормозной путь автомобиля должен быть по возможности минимальным и постоянным в различных условиях эксплуатации автомобиля;
• работа ТС не должна вызывать потери устойчивости автомобиля в различных дорожных условиях, т.е. автомобиль при торможении не
• должен выходить за пределы динамического коридора;
ТС и ее элементы должны иметь высокую надежность (безотказность) при эксплуатации в различных дорожно-климатических условиях;
• размещение и возможность приведения в действие рабочих органов управления ТС (педали, рычаги и т.п.) должны способствовать достижению минимального остановочного пути и быть удобными при пользовании (обеспечивать выполнение требований эргономики);
• конструкции тормозных систем должны разрабатываться с учетом возможности обеспечения минимальной вероятности наездов автомобилей в транспортном потоке в условиях использования ТС (в том числе за счет обеспечения внешней сигнализации о начале и интенсивности торможения).
Основными составляющими тормозной динамики являются: -начальная скорость, замедление при торможении, время и путь торможения, равномерность затормаживания, сохранение эффективности ТС в течение срока службы АТС, устойчивость автомобиля в процессе торможения, легкость управления ТС и др.
К основным показателям тормозной динамики относятся: заданные величины замедления (м/с2), времени торможения (с), пути торможения (м), суммарной тормозной силы (Н) и силы давления на педаль (Н) для приведения ТС в действие.
К основным характеристикам можно отнести: зависимости изменения скорости; ускорения и пути от времени торможения;
• зависимости нарастания тормозных сил от времени торможения;
зависимости сил сцепления шин с дорогой от времени торможения.
2. Измерители, показатели и характеристики тормозных свойств автомобиля
В чем разница между измерителями и показателями. Их часто путают и употребляют неправильно.
Измеритель - это то, в чем измеряется величина (м, с, м/с, км/ч и т.п.)
Показатель - это характерная величина, принятая в качестве оценочного показателя (путь 1000 м; скорость 100 км/ч; максимальное ускорение; максимальная скорость, расход топлива на 100 км пути и т. п.).
Характеристика - это зависимость, характеризующая то или иное качество автомобиля - зависимость скорости от пути и времени разгона или движения на заданном маршруте, участке дороги;
зависимость средней скорости от допустимой на дороге с переменным продольным профилем и т. д. Определенные величины могут быть заданы в виде нормативов ГОСТами, ОСТами, РТМ и т. д.
Время в процессе торможения включает в себя: время реакции водителя (tp), время срабатывания привода тормозов (tc), время нарастания тормозных сил (tн), время установившегося торможения (ty)
Другими словами называют это остановочным временем:
to= tp+ tc+ tн+tу.
Примерные значения подготовительного времени перед торможением примерно таковы: tp= 0,3-2,5 с. Но при внезапном возникновении опасности оно существенно увеличивается (иногда в несколько раз).
Время срабатывания тормозного привода тормозов tc= 0,2-0,3 с при гидроприводе и tc= 0,6-0,8 с при пневмоприводе. У автопоездов оно достигает 2-3 с.
Ниже указана примерная схема сил, действующих на автомобиль, в процессе торможения (рис. 2.1 а) и зависимость сил сцепления шин с дорогой (рис. 2.1 б).
Касательные реакции (Rx) до блокировки колес (см. рис 2.16, I) принимают пропорциональными тормозным моментам:
Rxi=MTl/r; Rx2=MT2/r (2.1)
Или пропорциональными времени:
Rx1=Kl*t; Rx2=K2*t (2.2)
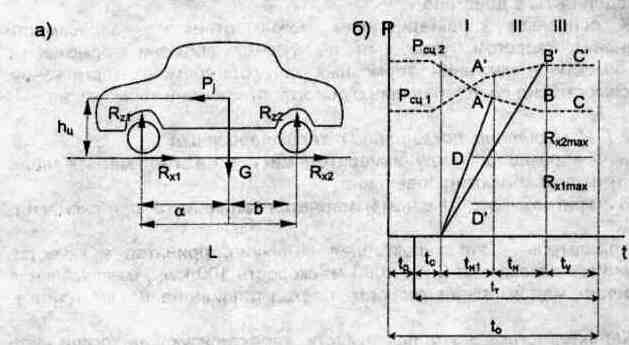
Рис. 2.1, Схема режима торможения автомобиля:
а - схема сил, действующих на автомобиль при торможении;
б • зависимость сил сцепления от времени
Коэффициенты К и К учитывают интенсивность нарастания тормозных сил. В случае гидропривода они равны примерно 15-30 кН/с;
а в случае пневмопривода - порядка 25-100 кН/с.
В силу компоновочных факторов у легковых автомобилей К1>К2, так как центр тяжести у них расположен примерно в середине; у грузовых, наоборот, К1<К2, так как до 70% массы у них приходится на задний мост.
Следует отметить три периода режима торможения (см. рис. 2.1 б).
I - период до блокировки колес (tн);
II - период после блокировки задних колес (t- tн);
III - период после блокировки всех колес (ty).
Нормальные реакции на колесах Rz1 и Rz2 зависят от интенсивности торможения.
Сила инерции
Pj=Rxi+Rx2=(Kl+K2)*t (2.3)
Сила сцепления шин переднего моста
Pcц=[G*b+(Kl+K2)*hц*t]*φx/L (2.4)
Сила сцепления шин заднего моста
Pcц=[G*a-(Kl+K2)* hц *t/L (2.5)
Где G - масса автомобиля (кг);
hц - высота центра тяжести (м);
а и b - расстояния от мостов до центра тяжести (м);
φx - коэффициент сцепления шин с дорогой.
Таким образом, в первый период (см. рис 2.16, I) тормозные силы сцепления Рсц1 передних колес увеличиваются, а задних колес Рсц2 -уменьшаются пропорционально времени торможения.
Во втором периоде (см. рис. 2.1 б, II), после блокировки задних колес сила Rx остается равной Рсц. •
Сила инерции автомобиля после блокировки колес заднего мостf уменьшается и равна:
Рj=Рсц+К*t (2.6)
После блокировки всех колес (см. рис. 2.1 III) силы реакции уравновешиваются с силами сцепления, достигая максимума.
Суммарная сила сцепления всех колес в третьем периоде торможения соответствует равенству: •
Rxl+ Rx2= (Rzl+ Rz)* φx=G* φx (2.7)
Практически автомобили с гидроприводом тормозов этого не достигают, так как у водителя недостает силы нажатия на педаль тормоза, особенно если нет усилителя привода.
Усилия водителя на педаль при экстренном нажатии на педаль достигают примерно 500-600 Н и не превышают 1000-1200 Н.
У автомобилей с пневмоприводом рост тормозных сил ограничивается мощностью компрессора, то есть давлением воздуха в магистрали. Поэтому процесс торможения обычно до юза не доходит.
Чаще сначала блокируются колеса заднего моста. Из-за конструктивной сложности тормозной системы у автомобилей с большой массой касательные силы обычно меньше сил сцепления и, следовательно, показатели" тормозной динамики ниже, чем у автомобилей с малой массой, например у легковых автомобилей.
Однако режим юза хуже, чем режим награни юза. Потому, что силы сцепления на режиме юза уменьшаются вследствие снижения коэффициента сцепления (рх. .
Замедление, путь и время торможения
В период от начала торможения до блокировки колес задней оси замедление равно:
J3=(Ki+K2)*t/M (2.8)
В конце первого периода торможения (t= TН1)
Скорость
V1 = V– αт*tн2/2, (2.9),
где Vo- начальная скорость автомобиля в момент торможения;
М - полная масса автомобиля (кг);
αт- коэффициент торможения.
Путь, пройденный автомобилем в первый период торможения:
S1=Vo*tнl-αt*tн2 /M (2.10)
А если пренебречь последним членом, то S1=\/о* tнl
Упрощенное выражение для пути во втором периоде имеет вид;
S2=S1+V1*(tн)-βт*(tн-tн1)2/2, (2.11)
где
βT=a*φx*g/(L+hц* φx ) (2.12)
В заключительном третьем периоде (после блокировки всех колес) сила инерции равна:
Pj=G*φx и J"=g*φx (2.13)
Автомобиль движется равномерно (J=const) скорость падает от величины V2 до О,
V=V2-J"*t (2.14)
Продолжительность третьего периода (до Vз=0) характеризуется временем установившегося торможения:
ty =V2/(g*φx) (2.15)
Время торможения:
tT=tс+tн+ty (2.16)
Общее остановочное время:
to=tp+tc+tH+ty (2.17)
Соответственно, путь установившегося движения:
Sу=V2/(2*g*φх) (2.18)
Путь торможения:
Sт=Sс+Sн+Sу (2.19)
Остановочный путь:
So=Sp+Sc+Sн+Sy . (2.20)
где Sp - путь, пройденный автомобилем за время реакции водителя (м);
Sc - путь, пройденный автомобилем за время срабатывания привода тормозов (м);
Sн – путь, пройденный автомобилем за время нарастания тормозных сил (м);
Sy - путь, установившегося торможения (м);
Время нарастания тормозных сил следует определять по формуле
tH=Rxlmax/Kl (2.21)
Замедление на третьем этапе определяется по формуле:
J3'"=G*a*φx+Rx1max*hц/(L+ hц *φx)*M (2.22)
Ниже, для примера, на графике (рис. 2.2) показаны тормозные диаграммы грузового автомобиля.
а) б)
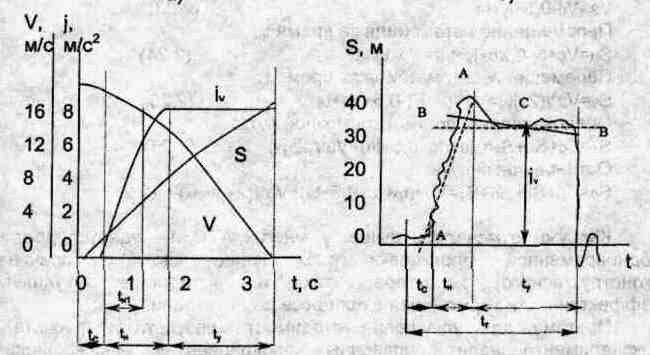
Рис. 2.2. Тормозные диаграммы автомобиля:
а - расчетная;
6- экспериментальная
Видно, что в действительности замедление в течение времени tн может изменяться не по линейному, как принято в расчете, а по другому, более сложному закону, и начало блокировки колес заднего моста установить трудно. В течение времени ty замедление не остается постоянным. А после остановки автомобиля кривая проходит ниже оси
абсцисс. Это вызвано колебаниями кузова на подвеске, в котором установлена регистрирующая аппаратура. После обработки экспериментального графика кривые линии апроксимируются прямыми АА и ВВ, точку пересечения их считают за начало установившегося движения торможения. Величина замедления в третьем периоде определяется ординатой точки С, расположенной посередине апроксимирующей прямой ВВ.
Расчетные формулы учитывают основные факторы, влияющие на процесс торможения, в частности, конструктивные факторы (масса, положение центра тяжести, колесная база, скорость нарастания тормозных сил и т. д.).
Если известны величины tc, tн и jy, то тормозной путь можно определить следующим образом.
Предположим, что в течении времени (ц автомобиль движется равнозамедленно cj=0,5* jy.
Найдем скорость, соответствующую началу замедления:
V2=Vo-0,5*jy*tн (2.23)
Перемещение автомобиля за время tн:
SH=Vo*tH-0,25*jy*tH2=Vo*tH (2.24)
Перемещение автомобиля за время ty:
Sy=V2/(2*jу)=Vo2/(2* jy )-0,5*Vоt (2.25)
Следовательно, полный тормозной путь:
Sт=Sc+Sн+Sy=Vo*(tс+5*tн)+Vo2/(2*jy) (2.26)
Остановочный путь:
So=Sp+Sc+Sн+Sy=Vo*(tp+tc+0,5*tн)+Vo2/(2*g*φx) (2.27)
Как уже отмечалось выше, у многих АТС, не удается достичь одновременной блокировки всех колес как по причинам конструктивного характера, так и вследствие ухудшения эффективности торможения в процессе эксплуатации.
Поэтому для улучшения сходимости результатов расчета и эксперимента вводят поправочный коэффициент Кэ - коэффициент эффективности торможения. Примерные значения его для сухого асфальтобетонного покрытия (φх=0,7) (табл. 2.1).
Таблица 2.1 Коэффициент эффективности торможения
-
Тип АТС
Без нагрузки
С полной нагрузкой
Легковые
1,1-1,15
1,15-1,2
Грузовые и автобусы М≤10 т
1,1-1,3
1,5-1,6
Грузовые и автобусы М≥10 т
1,4-1,6
1,6-1,8