

1 Идентификация объекта управления
1.1 Общая передаточная функция объекта регулирования
y(p) x (P)

Рисунок 1- Структурная схема объекта регулирования
Структурная схема объекта регулирования представлена на рис.1 и описывается функцией :
Wобщ(p)= Wo1 (р)*Wo2(р)*Wo3(р)*Wo4(р)
0.6 0.7 2.6
Wo1(p)= ------- ; Wo2(p)= -------- ; Wo3(p)= ------- ; W04(p)= e- 2.2+1
0.4р +1 2.4р +1 1.8р +1
Koi
Wi (p) = --------
Toi + 1
W04 (p)= e - p*I
Структурная схема состоит из четырёх последовательно соединённых звеньев, где W01(p), W02(p) и W03(p) звенья инерционного первого порядка и W04(p) звена чистого запаздывания.
Передаточная функция объекта и системы полностью определяет ёё динамические свойства и первоначальная задача расчёта
АСР сводится к определению ёё передаточной функции. Вследсвии тoго что элементы объекта и системы обладают свойством
детектирования передаточную функцию объекта можно найти по передаточным функциям отдельных его элементов :
 y(p)
X
(p)
y(p)
X
(p)
рисунок 2- Упрощённая модель объекта регулирования
В этой структурной схеме я преобразовал Wo1(p) c Wo2(p), по правилу эквивалентного преобразования, для упрощения со схемой. Передаточная функция всей схемы регулирования принципе не изменилась только два звена стали одним общим и их произведение равно общей передаточной функцией двух звеньев:
0.6 0.7 1.02
Wэкв (p) = Wo1(p)* Wo2(p)= -------- * ----------- = --------------------
0.4р +1 2.4р + 1 9.84р2 + 6.5 s + 1
 y(p)
x
(P)
y(p)
x
(P)
Рисунок 3 – Эквивалентная модель объекта регулирования
И ещё раз упростили схему по правилу эквивалентного пребразования и совместили два звена и вид их общей передаточной
функции будет выглядеть так:
1.02 2.6 2.652
Wэкв (p) = Wo1(p)* Wo2(p)= -------------------------- * ------------ = ------------------------------------------
9.84р2 + 6.5р + 1 1.8р + 1 17.712р3 + 21.54р2 + 8.3 +1
y(p)
x
(P)
Рисунок 4 – Общая схема объекта регулирования
Структурную схему преобразовали до того, что в ней осталось одно звено, а его передаточная функция равна произведению
соединённых звеньев:
0.6 0.7 2.6 - 2.652 + 0.92727
Wэкв (p)= ------- * ------- * -------- * e- 2.2 +1 = -------------------------------------------
0.4р+1 2.4р+1 1.8р+1 17.712р4+37.6418р3+27.8818р2+ 8.5455р + 0.90909
Независимо сколько раз я преобразовывал структурную схему общая передаточная функция остаётся неизменной.
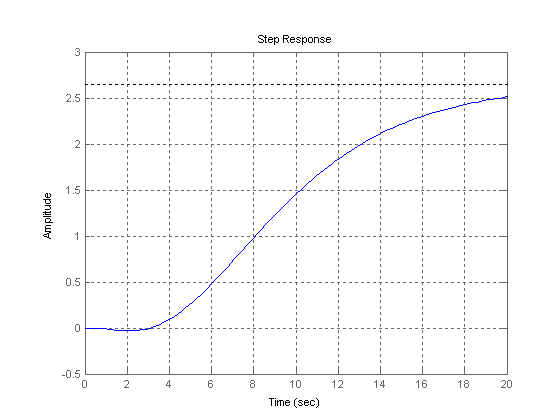
Рисунок 5
Кривая переходного процесса представлена на рис.2 Переходным процессом называют процесс перехода
выходного сигнала элемента из одного установившегося состояния в другое при поступлении на вход элемента ступенчатого сигнала. Графическое изображение переходных процессов подразделяются на
колебательные и монотонные. На данном рисунке изображен монотонный процесс, который имеет
S- образный характер изменения выходного сигнала
Функция построения графика переходного процесса описана программой MATLAB 6.1 и имеет вид
n1=[0.6];d1=[4.1 1];
n2=[1.7];d2=[2.4 1];
n3=[2.6];d3=[1.8 1];
[num1,den1]=pade(2.2,1);
[num2,den2]=series(n1,d1,n2,d2);
[num3,den3]=series(num2,den2,n3,d3);
[num4,den4]=series(num1,den1,num3,den3);
printsys(num4,den4);
step(num4,den4);
grid on