

4. Властивості операційних систем сенсорних вузлів
Метод B-MAC в операційних системах сенсорних вузлів
В операційних системах сенсорних вузлів використовується метод B-MAC (Berkeley MAC). Цей метод поєднує властивості методів доступу до каналу CSMA/CA та асинхронних методів сна/пробудження. Метод S-MAC (Sensor-MAC) використовує схему сна/пробудження за розкладом. Метод D-MAC адаптований для мереж зі деревовидною структурою. Для виконання функцій на кожен мот встановлюється спеціалізована операційна система.В даний час в більшості безпровідних сенсорних мереж використовується TINY OS – операційна система, розроблена в Університеті Берклі.Відноситься до програмного забезпечення з відкритим кодом розрахована на роботу в умовах обмежених обчислювальних ресурсів. Ця ОС дозволяє сенсорам автоматично встановлювати зв’язки з сусідами і формувати сенсорну мережу заданої топології. Останній реліз TINYOS 2.0 з’явився в 2006 році.
Безпровідні сенсорні мережі
Безпровідні сенсорні мережі (wireless sensor networks) складаються з мініатюрних обчислювально-комунікаційних пристроїв – мотів (від англ. motes – порошинки), або сенсорів. Сенсор є платою розміром зазвичай не більш за один кубічний дюйм. На платі розміщуються процесор, пам’ять флеш і оперативна, цифро-аналогові і аналого-цифрові перетворювачі, радіочастотний приймач, джерело живлення і датчики.
Датчики можуть бути найрізноманітнішими; вони підключаються через цифрові і аналогові конектори. Частіше за інших використовуються датчики температури, тиску, вологості, освітленості, вібрації, магнітоелектричні,хімічні (наприклад, що вимірюють зміст CO, CO2), звукові і деякі інші. Набір використаних датчиків залежить від функцій, що виконуються безпровідними сенсорними мережами.
Живлення мотів здійснюється від невеликої батареї. Моти використовуються тільки для збору, первинноїобробки і передачі сенсорних даних. Основна функціональна обробка даних, що збираються мотами, здійснюється на вузлі, або шлюзі, який є достатньо потужнім комп’ютером. Але для того, щоб обробити дані, їх потрібно спочатку отримати. Для цієї мети вузол обов’язково оснащується антенною. Але у будь-якому випадку доступними для вузла виявляються тільки моти, що знаходяться достатньо близько від нього; іншими словами, вузол не отримує інформацію безпосередньо від кожного мота. Проблема отримання сенсорної інформації, що збирається мотами, вирішується таким чином. Моти можуть обмінюватися між собою інформацією за допомогою приймачів, що працюють в радіодіапазоні. Це, по-перше, сенсорна інформація, що прочитується з датчиків, а по-друге, інформація про стан пристроїв і результати процесу передачі даних. Інформація передається від одних мотів іншим по колу, і в результаті найближчі до шлюзу моти скидають йому всю акумульовану інформацію. Якщо частина мотів виходить з ладу, робота сенсорної мережі після реконфігурації повинна продовжуватися. Але в цьому випадку, природно, зменшується число джерел інформації.
Для виконання функцій на кожен мот встановлюється спеціалізована операційна система (ОС). В даний час в більшості безпровідних сенсорних мереж використовується TINY OS.
Найважливішим чинником при роботі безпровідних сенсорних мереж є обмежена ємність батарей, що встановлюються на сенсори. Слід враховувати, що замінити батареї найчастіше неможливо. У зв’язку з цим необхідно виконувати на сенсорах тільки просту первинну обробку, орієнтовану на зменшення об’єму переданої інформації і що саме головне, мінімізувати число циклів прийому і передачі даних. Для вирішення цього завдання розроблені спеціальні комунікаційні протоколи, найбільш відомими з яких є протоколи альянсу «ZigBee». Даний альянс був створений в 2002 році саме для координації робітв області безпровідних сенсорних мереж. До нього увійшли найбільші розробники апаратних і програмних засобів: «Philips», «Ember», «Samsung», «IBM», «Motorola», «Freescale Semiconductor», «Texas Instruments», «NEC», «LG», «OKI» і багато інших (всього більше 200 членів).
В принципі, для вироблення стандарту, зокрема стека протоколів для безпровідних сенсорних мереж, ZigBee використовував розроблений раніше стандарт IEEE 802.15.4, який описує фізичний рівень і рівень доступу до середовища для безпровідних мереж передачі даних на невеликі відстані (до 75 м) з низьким енергоспоживанням, але з високим ступенем надійності.
Мініатюризація мікросхем і прогрес бездротового зв'язку відкривають нові горизонти в інформаційно-комп'ютерних технологіях. Експерти пророкують, що скоро мільярди мікроскопічних сенсорів, вбудованих мало не в усі навколишні нас предмети, від дерев до памперсів, зможуть реагувати на зміни в обстановці та взаємодіяти один з одним, вирішуючи безліч наших насущних проблем. Те, про що кілька десятиліть тому писали фантасти, ось-ось стане буденністю. Гряде нова парадигма - бездротові сенсорні ad hoc (Ad hoc - тобто «спеціальний, створений для цієї мети») мережі. Передумови Досягнення мікроелектроніки дозволяють інтегрувати на крихітному кремнієвому кристалі як обчислювальні блоки, так і пристрої для підтримки бездротових мереж - глобальних, локальних і персональних. А якщо на тому ж кристалі розташувати і засоби передачі даних, голосу і відео? Уже можливо створювати радіоприлади, здатні одночасно працювати в декількох режимах і в різних мережах (наприклад, «інтелектуальні» мобільні телефони і комунікатори). І скоро все це буде розміщено на одному кристалі, який можна встановити в наручних годинниках, в мініатюрних навушниках, мікрофонах, нагрудних значках і т. д. (використовуючи нові підходи в КМОП-технології і в технології мініатюрних електромеханічних систем (MEMS, micro-electrical mechanical systems), вже сьогодні можна інтегрувати всі основні схеми та компоненти, необхідні для створення КМОП-кристалів радіомікросхем, на стандартній кремнієвій пластині, як не раз зазначалося, наприклад, на Форумах Intel для розробників (концепція Radio Free Intel)) Причому всі ці « чудеса »стануть доступні розробникам додатків і споживачам вже в кінці поточного десятиліття, а то й раніше. Можливості застосування «мініатюрного напівпровідникового радіо» обмежені тільки нашої фантазією. Можна організувати сенсорну середовище з використанням функцій бездротової передачі даних - наприклад, для температурного або хімічного аналізу. А оскільки вартість таких датчиків складе кілька центів або навіть часткою цента, то подібні обчислювальні пристрої легко інтегрувати прямо в наше довкілля. Багатообіцяюче застосування сенсорів в медицині - моніторинг серцевого ритму, кров'яного тиску та інших життєво важливих показників для автоматичного попередження лікарів і надання невідкладної допомоги. А, скажімо, обладнана різноманітними сенсорами дитяче ліжечко здатна не тільки контролювати дихання або температуру тіла дитини, а й попереджати дорослих про небезпечні зміни цих параметрів або навіть самостійно вживати якихось заходів. А як вам плавальний басейн, який контролює чистоту води?
Можливості використання сенсорних мереж простягаються далеко за межі житла, офісу або медичного закладу - експерти називають, насамперед, екологію та служби порятунку: крихітні датчики, розкидані з літаків над лісовими масивами, піднімуть тривогу при виникненні пожежі, допоможуть відшукати заблукалих туристів, передадуть в диспетчерський центр по самоорганізується бездротової мережі вичерпний відомості про стан «зеленого океану». Вони ж можуть стежити за дозріванням врожаю, інформуючи фермерів про брак вологи, добрив тощо (див. також врізку).Використовуючи сенсорну мережу для збору інформації про стан довкілля в пташиному заповіднику на острові Грейт-Дак (штат Мен), біологи спільно з співробітниками Intel отримали дані про особливості поведінки рідкісних видів птахів, що раніше було неможливо. І це тільки мала частина найширших перспектив сенсорних мереж.
Самоналагоджувальні бездротові сенсорні мережі
Для ефективної роботи потрібно об'єднати сенсори в мережу. Дослідникам Intel вдалося створити спеціальні динамічні та самоналагоджувальні мережі, що використовують живляться від батарей сенсори, які самостійно встановлюють контакт з сусідніми сенсорами. Коли вони переміщуються, мережа динамічно змінює конфігурацію. Зараз завдання полягає в тому, щоб зробити датчики розміром з порошинку (mote). Під час однієї з демонстрацій подібної мережі на Форумі Intel для розробників по всій аудиторії було розкидано більше сотні м'ячів, забезпечених датчиками, а з базовою станції запустили серію алгоритмів, які визначали становище кожного датчика і його найближчих сусідів. Мережа сама обчислювала оптимальний маршрут слідування даних, який можна було спостерігати на екрані. Вузли перенаправляли дані 20-25 разів секунду протягом приблизно п'яти переміщень м'ячів, при цьому швидкість передачі становила 10 кбіт / с. На зміну конфігурації мережа витрачала близько п'яти секунд. Під час інший демонстрації була створена найбільша в світі самонастроювальну мережа, що складалася з декількох тисяч вузлів.Прикиньте, чи зможе оператор за лічені секунди сконфигурировать мережа, що містить хоча б кілька десятків вузлів? Термін «ad hoc» відображає суть подібних мереж, які організовуються кожен раз для вирішення конкретних завдань і після їх виконання розпадаються на окремі елементи, готові утворити нові мережі. Крихітні, як пилинки, напівпровідникові пристрої, що виконують обчислювальні та комунікаційні функції і здатні оптимальним чином автоматично конфігуруватися в мережі, є основою парадигми мереж ad hoc, що підвищує продуктивність і безпеку мережевих обчислень.
У концепції сенсорних мереж кардинально змінюється роль людини, оскільки їх елементи - сенсорні мікрокомп'ютери - стають набагато більш самостійними, часто предвосхищающими наші дії. «Гомоцентріческіх» модель мережевих обчислень відходить у минуле - людина перестає бути центром обчислень і стає лише посередником між реальним світом і комп'ютерами, займаючись спільною організацією системи.
Зрозуміло, щоб втілити в життя принадні мрії про сенсорних бездротових мережах, належить ще багато зробити. Малогабаритні датчики повинні не тільки інтелектуально відстежувати стан середовища, організовуватися в єдину бездротову мережу і володіти пристойним запасом енергії для автономної роботи, але і діяти в залежності від обстановки. І при цьому бути достатньо дешевими, щоб їх було дешевше викинути, ніж підзарядити.Поширення сенсорних мереж може дати ефект незрівнянно більший, ніж поширення Інтернету.
Актуальність WSN
Бездротові сенсорні мережі у відмінності від звичайних обчислювальних (провідних і бездротових) мереж мають масу переваг:
― повна відсутність яких б то ні було кабелів — електричних, комунікаційних і т.д.;
― можливість компактного розміщення або навіть інтеграції марнотратів в об'єкти навколишнього середовища;
― надійність як окремих елементів, так і, що більш важливо, усієї системи в цілому; у ряді випадків мережа може функціонувати при справності тільки 10-20% сенсорів (марнотратів);
― відсутність необхідності в персоналі для монтажу й технічного обслуговування.
Сенсорні мережі можуть бути використані в багатьох прикладних областях. Бездротові сенсорні мережі — це нова перспективна технологія, і всі пов'язані з нею проекти в основному перебувають у стадії розробки. Надамо основні області застосування даної технології:
― системи оборони й забезпечення безпеки; ― контроль навколишнього середовища; ― моніторинг промислового встаткування; ― охоронні системи; ― моніторинг стану сільськогосподарських угідь; ― керування енергопостачанням; ― контроль систем вентиляції, кондиціювання й освітлення; ― пожежна сигналізація; ― складський облік; ― спостереження за транспортуванням вантажів;
Реальний приклад використання WSN - бездротова система моніторингу стану будівельних конструкцій, розроблена російською компанією methlogic в 2010 році. Система забезпечує збір, реєстрацію й відображення показань від безлічі датчиків, установлених на різних елементах конструкцій для контролю їх напружено-деформованого стану й структурної цілісності.
Постановка завдання
З метою економії засобів на доробку й виправлення вже впроваджених бездротових сенсорних мереж їх проробляють з використанням емулятора, для визначення проблем, вузьких місць. Для значного полегшення аналізу майбутньої системи інформацію емуляції роботи мережі необхідно визуалізувати. Завданням роботи є створення програми, яка на базі емулятора TOSSIM змоделює бездротову сенсорну мережу, відобразить граф мережі і її роботу у реальному часі з дотриманням норм і критеріїв.
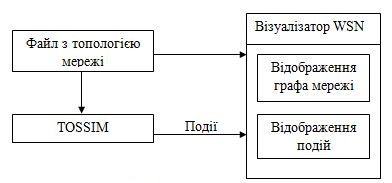 Рис.
Структурна
схема візуалізатора
Рис.
Структурна
схема візуалізатора
Технологія WSN
Бездротові сенсорні мережі (wireless sensor networks) складаються з мініатюрних обчислювально-комунікаційних обладнань — мотів ( від англ. motes — порошини), або сенсорів. Мот являє собою плату розміром зазвичай не більш одного кубічного дюйма. На платі розміщаються процесор, пам'ять — флэш і оперативна, цифроаналогові й аналого-цифрові перетворювачі, радіочастотний прийомопередавач, джерело живлення й датчики, які підключаються через цифрові й аналогові конектори (частіше інших використовуються датчики температури, тиску, вологості, освітленості, вібрації). Набір застосовуваних датчиків залежить від функцій, що виконуються бездротовими сенсорними мережами. Живлення мота здійснюється від невеликої батареї. Моти використовуються тільки для збору, первинної обробки й передачі сенсорних даних. Головна функціональна обробка даних, що збираються мотами, здійснюється на вузлі, або шлюзі, який являє собою потужний комп'ютер. Для одержання даних вузол оснащується антеною. Але доступними для вузла виявляються тільки моти, що перебувають досить близько від нього; інакше кажучи, вузол не одержує інформацію безпосередньо від кожного мота. Проблема одержання сенсорної інформації, що збирається мотами, вирішується в такий спосіб. Моти можуть обмінюватися між собою інформацією за допомогою прийомопередавачів, що працюють у радіодіапазоні. Це, по-перше, сенсорна інформація, зчитувана з датчиків, а по-друге, інформація про стан обладнань і результати процесу передачі даних. Інформація передається від одних мотів іншим за ланцюжком, і в підсумку найближчі до шлюзу моти передають йому всю акумульовану інформацію. Якщо частина мотів виходить із ладу, робота сенсорної мережі після реконфігураціі повинна тривати. Але в цьому
випадку, природно, зменшується число джерел інформації. Для виконання функцій на кожний мот встановлюється спеціалізована операційна система. У цей час використовується ОС Tinyos, розроблена в Університеті Берклі.
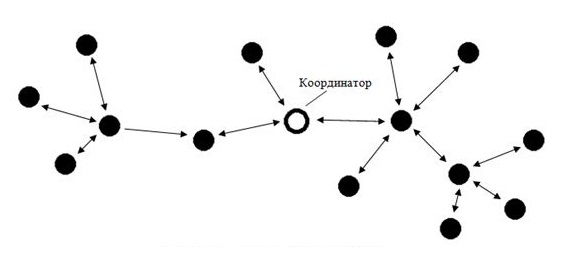
Рис. Топологія мережі WSN
Топологія
Протокол Zigbee був спеціально розроблений для мінімізації споживання електроенергії мотами. Тому на мотах проводиться тільки первинна обробка, орієнтована на зменшення обсягу переданої інформації.
Для вироблення стандарту, у тому числі стека протоколів для бездротових сенсорних мереж, Zigbee використовував розроблений раніше стандарт IEEE 802.15.4, який описує фізичний рівень і рівень доступу до середовища для бездротових мереж передачі даних на невеликі відстані (до 75 м) з низьким енергоспоживанням, але з високим ступенем надійності. Деякі характеристики радіопередачі даних для стандарту IEEE 802.15.4 наведено в таблиці 1.
На початку роботи відбувається ідентифікація всіх мотів, а потім вже формується схема маршрутизації. Взагалі всі моти в стандарті Zigbee за рівнем складності розбиваються на три класи. Перший і вищий з них — координатор — управляє роботою мережі, зберігає дані про її топологію й слугує шлюзом для передачі даних, що збираються всією бездротовою сенсорною мережею, для подальшої обробки. У сенсорних мережах, як правило, використовується один координатор. До наступного класу належать моти маршрутизатори, вони приймають і передають дані, а також можуть визначати напрямок передачі. І нарешті, найпростіший мот може лише передавати дані найближчому маршрутизатору. Таким чином, виходить, що стандарт Zigbee підтримує мережа із кластерною архітектурою. Кластер утворюють маршрутизатор і найпростіші моти, у яких він запитує сенсорні дані. Маршрутизатори кластерів ретранслюють дані один одному, і в остаточному підсумку дані передаються координаторові. Координатор звичайно має зв'язок з Ip-Мережею, куди й направляються дані для остаточної обробки. На сучасному етапі розвитку в протоколі Zigbee окремо моти-маршрутизатори й найпростіші моти в більшості випадків об'єднані в один, який виконує одночасно обидві функції. Приклад такої топології зображено на малюнку.
Емулятори
Існує кілька емуляторів, за допомогою яких можна моделювати бездротові сенсорні мережі. Найбільш відомими є NS2 і TOSSIM. Розглянемо ключові особливості кожного з них.
NS2 є універсальним і може бути використаний для моделювання як провідних, так і бездротових мереж. Він моделює роботу на мережному рівні й не може моделювати поведінку додатків, тому не зовсім підходить для сенсорних мереж.
У теж час TOSSIM емітує роботу мережі на рівні бітів і безпосередньо пов'язаний з Tinyos. TOSSIM був розроблений спеціально для моделюванні тільки бездротових сенсорних мереж
TOSSIM і NS2 фокусуються на різних аспектах роботи мережі й мають різну архітектуру. Найбільш придатним для реалізації поставленого завдання є TOSSIM, тому його розглянемо докладніше.
Емулятор TOSSIM
Для розробки й тестування роботи мереж використовується емулятор TOSSIM. Емулятор дозволяє виконувати той же код, що й реальні сенсорні вузли.
TOSSIM використовує дуже просту, але неймовірно потужну модель бездротової мережі. Мережа представляється у вигляді графа, у якому кожна вершина — бездротової вузол і кожній дузі між вузлами поставлене у відповідність деяке значення — імовірність помилки. Кожний вузол має локальну змінну, куди заноситься те, що ухвалюється їм по радіоканалу.
TinyОS має компонентну архітектуру, яка при правильному компонуванні забезпечує мінімальний розмір коду, що дуже важливо для сенсорних устроїв, які мають строгі обмеження за обсягом пам'яті. Бібліотека компонентів Tinyos включає мережеві протоколи, драйвери сенсорів і утиліти одержання й збору інформації, які можуть бути вдосконалені в клієнтських додатках. Реалізована в Tinyos модель подій, що дає можливість управляти живленням на низькому рівні, що дозволяє заощаджувати енергоспоживання. Tinyos перенесена більш ніж на дюжину апаратних платформ і численні сенсорні обладнання.
Як і в більшості інших ОС, в Tinyos основним керуючим механізмом є подія. Подія сигналізує про одержання показань сенсора, про вступ пакета даних по бездротовому зв'язку, про спрацьовування таймера або про завершення обчислень. Обробка апаратної події лежить в основі всіх операцій в Tinyos. Таким чином, основне завдання TOSSIM — емуляція подій для БСМ, моти якої працюють під керуванням Tinyos. TOSSIM встановлюється на звичайний ПК разом з набором інструментальних засобів, необхідних для створення, компіляції, установки й налагодження додатків для БСМ. Робота із цими інструментами здійснюється за допомогою командного інтерфейсу, характерного для ОС UNIX.
Загальні характеристики емулятора TOSSIM:
― масштабованість — емулятор може моделювати роботу як окремих мотів, так і величезних мереж, що полягають із декількох тисяч вузлів;
― повнота — емулятор у стані моделювати різні схеми взаємодії елементів БСМ, причому не тільки алгоритми й мережні протоколи, але й мінливу структуру сенсорної мережі;
― точність — емулятор може представляти поведінку мережі з необхідною точністю. Визначення точного часу настання подій важливо як для аналізу, так і для тестування додатків для БСМ;
― вірогідність — емулятор реалізує адекватний перехід від моделюемого до реального середовища виконання додатка, надаючи розробнику можливість тестувати код, який призначений для реального встаткування.
До складу емулятора TOSSIM входять наступні елементи:
― засіб вбудовування самого тестуемого додатка Tinyos у структуру емулятора;
― набір програмних компонентів, які заміняють відповідні апаратні компоненти реальних марнотратів;
― механізми опису моделей радіоканалів і аналого-цифрових перетворювачів (ADC);
― засобу зв'язку, що надають можливість зовнішнім програмам взаємодіяти з емулятором.
Метод візуалізації графа за допомогою фізичних аналогій.
Структуру мережі можна представити у вигляді ненаправленого графа, до того ж розташування мотів таке, що мережа має мінімальна кількість перетинань. Його можна визуалізувати за допомогою алгоритму малювання графів на основі фізичних аналогій. Головною перевагою такого методу малювання графа те, що він дає в підсумку гарне відображення графа. У більшості випадків він будує симетричні зображення графів.
Метод полягає в тому, що граф розглядається як система тіл із силами взаємодії між ними. Вершини графа вважають тілами, а ребра пружинами. У такому випадку алгоритм знаходить конфігурацію тіл з локальною мінімальною енергією – так звану конфігурацію рівноваги сил, у якій кожне тіло займає таку позицію, що сума всіх сил, прикладених до тіла, дорівнює нулю.
Специфікація модуля візуалізації
Модуль візуалізації розробляється на мові Java і буде сполучений із програмою емуляції TOSSIM. При запуску емуляції програма буде по відомій топології створювати граф мережі й визуалізувати його. У процесі роботи емулятора будуть перехоплюватися повідомлення, що генеруються TOSSIM а також прослуховуватися порти, які використовуються для емуляції радіопередачі пакетів. На підставі цих даних буде відображатися на графові переміщення пакетів і інформування про події, що відбуваються на кожному марнотратові. Також інформація про події буде виводитися в текстовому форматі з можливістю фільтра по категорії, що цікавить.
Перспективність розвитку бездротових сенсорних мереж очевидна. Вже зараз у багатьох галузях починають використовувати WSN. Це і моніторинг екології, авто трафіку, моніторинг погоди. З вдосконаленням технологій і ускладнення різних виробництв потреба в бездротових сенсорних мережах буде тільки рости. Але перш ніж впроваджувати мережі їх необхідно ретельно протестувати, тому й потрібен хороший емулятор з чіткою візуалізацією роботи майбутньої мережі.