5.4. Механические сканирующие устройства
В механических сканирующих устройствах
перемещение ультразвукового луча
осуществляется посредством механического
движения преобразовательного элемента
или движения акустического рефлектора
при неподвижном преобразователе.
Наибольшее распространение на практике
получили три основных типа механических
сканирующих устройств: сложного
сканирования; углового сканирования;
иммерсионного многоракурсного
сканирования.
У
Рис.
5.11. Контактное ручное сканирование
стройства сложного сканирования.
Эти устройства представляют
собой рычажно-шарнирный механизм, один
конец которого закреплен, а другой –
подвижен. К подвижному рычагу механизма
при помощи шарнира прикреплен одномерный
пьезопреобразователь, который может
перемещаться в одной плоскости.
Сканирующее устройство данного типа
действует в результате ручного перемещения
преобразователя в плоскости сканирования
при непосредственном его кон-такте
с исследуемым объектом (рис. 5.11). Этим
объясняется второе название такого
устройства – контактное. В процессе
ультразвукового сканирования устройство
формирует электрические сигналы,
определяющие положение преобразователя
на объекте и направление луча в исследуемой
среде. Для этого в состав сканирующего
устройства включаются датчики угла
поворота рычагов друг относительно
друга, в качестве которых применяются
синус-косинусные потенциометры,
оптические элементы и другие
гониометрические преобразователи.
Преимущество контактных
сканирующих устройств подобной
конструкции заключается в возможности
формирования высококачественных
ультразвуковых изображений при большом
поле ультразвукового обзора. Основной
их недостаток – значительное время
формирования эхоизображения, что
затрудняет отображение подвижных
объектов исследования.
У
Рис.
5.12. Схема преобразователя, построенного
по
принципу "качалки"
Рис.
5.13. Схема роторного секторного
преобразователя
стройства углового сканирования.
В зависимости от функционального
назначения преобразователи для углового
сканирования могут иметь различную
конструкцию. Преобразователи механического
секторного сканирования (предназначены
для кардиологии) должны обеспечивать
высокую скорость движения луча, иметь
компактную конструкцию (для наблюдения
сердца через межреберное пространство).
Подобные преобразователи строятся по
принципу механической "качалки".
В качестве преобразовательного элемента
здесь применяются одноэлементные
структуры или кольцевые матрицы
аналогичные тем, что используются в
устройствах ручного сканирования. При
сканировании преобразователь
поворачивается относительно нормали
к рабочей поверхности в противоположные
стороны, вследствие чего ультразвуковой
луч качается в заданном секторе.
Схематическое изображение конструкции
приведено на рис. 5.12 (цифрами обозначены:
1 – пьезоэлемент, 2
– движитель, 3 –
датчик угла, 4 – луч).
Если требования к габаритным размерам
рабочей поверхности не очень жесткие,
то возможны и другие конструкции
преобразователей секторного сканирования.
Так, на рис. 5.13 (где 1–
движитель, 2 –
пьезоэлемент, 3 – луч)
изображен преобразователь, работа
которого основана на вращении нескольких
одноэлементных преобразователей.
Сканирование ультразвуковым лучом
здесь достигается за счет их вращения
вокруг оси симметрии, размещения и
коммутации элементов. Другая конструкция
подобного типа основана на применении
лентопротяжного механизма с закрепленными
на нем преобразователями. Существует
также вариант, изображенный на рис. 5.14
(на рисунке обозначены: 1
– роторные движители пьезоэлементов,
2 – область сканирования),
когда несколько вращающихся или
качающихся преобразователей расположены
в ряд. В этом случае возможна реализация
комбинированного линейно-секторного
сканирования.
С
Рис.
5.14. Схема роторного линейно-секторного
сканирующего устройства
тоит упомянуть и еще одну
конструкцию секторного сканирующего
устройства. В ней используется неподвижный
преобразователь, а сканирование
осуществляется вращением акустического
рефлектора (рис. 5.15, где 1
– кольцевая матрица пьезоэлементов, 2
– вращатель рефлектора, 3
– рефлектор, 4 – луч). В
качестве преобразовательного элемента
здесь применена кольцевая матрица,
позволяющая фокусировать луч.
В
Рис.
5.15. Секторно-сканирующее устройство
с
вращающимся акустическим рефлектором
се рассмотренные варианты сканирующих
устройств имеют в качестве основного
конструктивного элемента микродвигатель,
который управляется от специальной
схемы, реверсирующей его движение в
необходимом секторе. Кроме того, схема
управления содержит функциональные
узлы стабилизации скорости сканирования
и координатные датчики угла поворота
луча. Подобные конструкции требуют
применения иммерсионной промежуточной
среды между преобразователем и исследуемым
объектом. Это вызвано тем, что колебательные
и вращательные движения преобразователя,
соприкасающегося с кожей пациента,
могут вызвать неприятные ощущения.
Кроме того, движение тканей может вызвать
появление артефактов в виде "смазывания"
эхоизображения. Преобразователи в этом
случае целесообразно помещать в резервуар
с водой, у которого рабочая поверхность
выполняется в виде тонкостенной мембраны.
Для наглядности
схема подобного сканирующего
устройства приведена на рис. 5.16.
Материал мембраны имеет акустические
свойства, близкие к свойствам биотканей.
Конструкции с водяным буфером довольно
громоздки, но они позволяют визуализировать
поверхность и приповерхностные слои
объекта, что исключено при контактном
методе сканирования вследствие
образования "мертвой" зоны. Кроме
того, иммерсионные сканирующие
устройства позволяют применять
пьезопреобразователи большой и
криволинейной апертуры. Это
обеспечивает повышение разрешающей
способности и чувствительности.
И
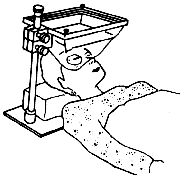
Рис.
5.16. Схематическое изображение устройства
с
буферной иммерсионной средой
менно такими свойствами обладают
стационарные установки для ультразвуковой
маммографии и абдоминальной диагностики
в медицине. Их относят к третьей
разновидности устройств, которые
используют механическое сканирование
ультразвуковыми лучами.
Устройства иммерсионного
многоракурсного сканирования.
Это стационарные крупногабаритные
установки, имеющие большие резервуары
с жидкостью с большой площадью поверхности,
которая необходима для акустического
контакта с телом пациента. Подобные
установки имеют, как правило, несколько
преобразователей. В них обычно применяется
линейно-секторное или секторно-дуговое
механическое сканирование. Данные
системы имеют широкое поле ультразвукового
обзора при достаточно высоком
быстродействии. Однако они очень
громоздки и дорогостоящи. В то же время
высокое качество эхоизображений,
особенно таких слабоконтрастных для
ультразвука органов, как молочная
железа, оправдывает все затраты. Из-за
этого данный тип систем успешно
развивается наряду с другими.

