Iнкрементні, оптичні сенсори кутового положення
Для
вимірювання кутового положення
використовуються інкрементні оптичні
сенсори
(рис.11.43).
В цьому випадку риски нанесені на краю
обертового диску.
Риски поділок зчитуються зчитувальною
плиткою з двома
рисковими поділками, які зсунуті одна
відносно іншої на
1/4 періоду поділки. Якщо кількість рисок
становить, наприклад,
36 000, то при інтерполяції 1:1024 отримуємо
роздільну здатність 0,00001°.
Сенсори
кутового положення використовуються
також, в поєднані з прецизійною
кульково-гвинтовою парою для вимірювання
лінійного положення.
За кроку різьби гвинта
P
= 10
мм
i диску сенсора з 2500 рисками на периметрі,
при чотирикратному діленні періоду,
отримуємо 10000
імпульсів на оборот вимірювального
валу, а, отже, роздільну здатність 10
мм/10000
= 1 мкм.
Iнкрементні, магнітні сенсори лінійного і кутового положення
У

Рис.11.43.
Інкрементальний оптичний
сенсор кутового
положення
магнітних сенсорах на металевому
шарі підкладки нанесений магнітний
матеріал, який намагнічений
(рис.
11.44)
з періодом поділок біля 0,2 мм
- подібно, як
при звукозаписі звуку на магнітофонній
стрічці.
Для
зчитування служать дві зчитувальні
головки, зсунуті на чверть періоду
поділки (/4)
i завдяки тому утворюють два зміщені
один відносно іншого по фазі синусоїдальні
сигнали.
Для
виявлення магнітних полів використовуються
давачі Холла.
Кількість інкрементів на один оборот
залежить від діаметру магнітного диску,
наприклад, 2048 імпульсів на оборот.
Кодові лінійки
і диски абсолютних сенсорів
Л
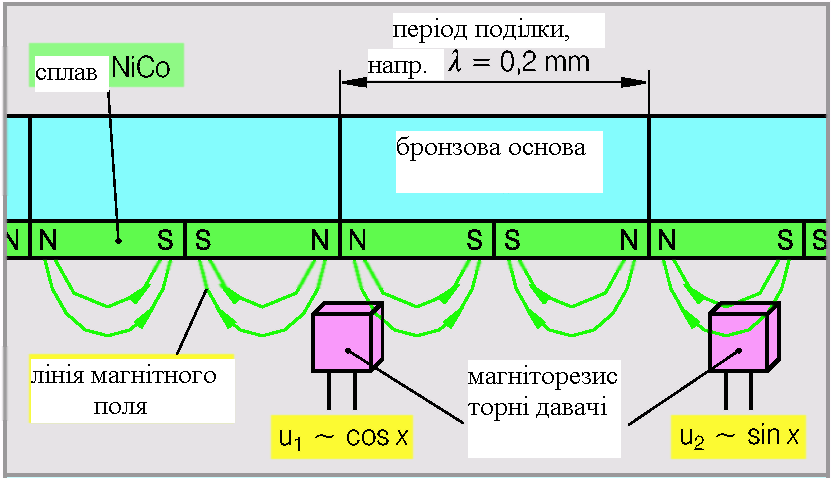
Рис.11.44.
Інкрементальний магнітний
сенсор
інійки з написаними на них числами
не можуть використовуватись як
перетворювачі положення, тому що
автоматичне читання
чисел клопітливе і крім того вони
не можуть бути розміщені занадто близько
одне від іншого.
Лінійки
з бінарним кодом можуть використовува
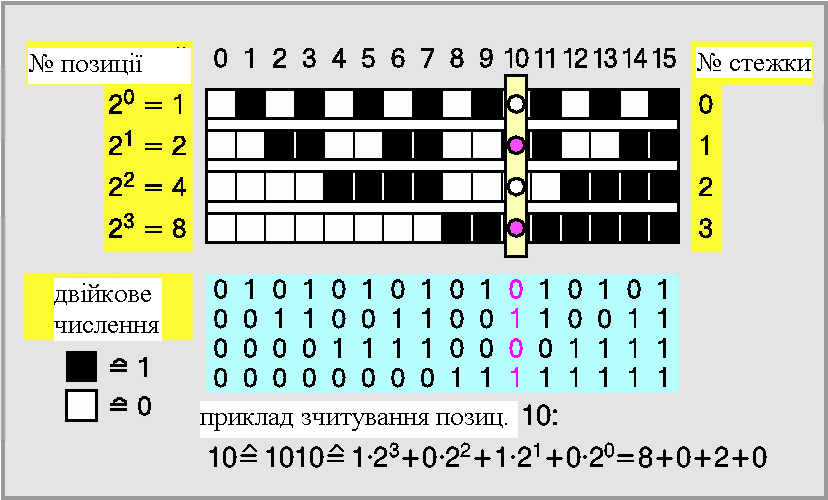
Рис.11.45.
Лінійка з поділками в
бінарному коді
тись для абсолютних вимірювань
(безумовних). Вони
мають таку систему полів, наприклад,
чорних і білих або пропускаючих і
непропускаючих світло,
що кожна позиція на лінійці бути
однозначно підпорядкована одному числу.
Часто
бінарне кодування виконується так, що
в нульовій стежці пропускаючі і
непропускаючі світло
риски
мають таку ширину, як інкрементальні
сенсори
(рис.
11.45).
У першій стежці ширина рисок
вдвічі більша ніж в нульовій стежці. У
кожній наступній стежці ширина рисок
збільшується двічі.
Виключення
помилок зчитування
Т

Рис.11.46.Система
зчитування
методом
V
ак як границі рисок в окремих стежках
розміщені не точно, а фотодіоди мають
різну чутливість
на світло під час читання в місцях
переходу
між пропускаючими і непропускаючими
світло
полями,
можуть виникати помилки. Ці помилки є
тим більшими, чим більшу вагу має стежка,
яка змінює своє значення.
Використовуючи
систему
зчитування методом V
бінарний
код може
бути зчитаний однозначно, без помилок
зчитування (рис.
11.46).
К
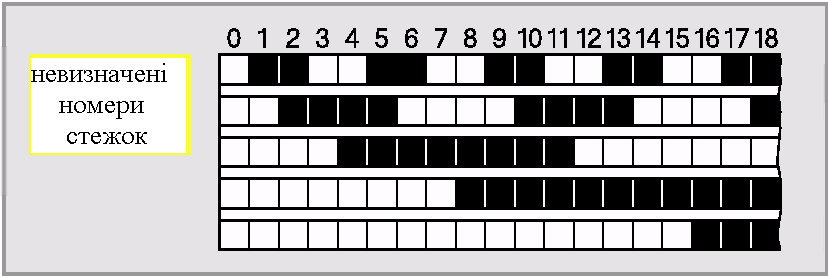
Рис.11.47.
Лінійка з кодом Грея
оли в одній стежці розпізнано темне
поле, то
для зчитування наступної стежки
активізований лівий фотодіод,
в протилежному випадку - правий.
Застосовуються лінійки з кодами, в яких
перехід від однієї позиції до наступної
пов'язаний із зміною розряду тільки
в одній стежці. Такі коди, наприклад,
код Грея, називаються кодами
з постійним проміжком (рис.
11.47).
У випадку коду
Грея немає потреби в системі, що читає
згідно
з методом V, тому що зчитуване значення
може відрізнятися
від правильного значення що найвище на
1. Код Грея
не має постійних номерів позиції. З
метою подальшого опрацювання зчитувані
сигнали мусять бути перетворені на
інший код.
Сенсори
кутового положення з обертовими кодовими
дисками
Обертові
кодові диски застосовуються в сенсорах
абсолютного кутового положення
(називаються
ще кутовими
кодерами),
а
в поєднані з гвинтовою або зу

Рис.11.48.
Кодовий диск
бчатою передачею
–
для вимірювання абсолютних лінійних
положень.
На кодовий диск нанесено – у вигляді
від 10 до 17 стежок – узор коду (рис.
11.48),
що відповідає від 210
= 1024 дo 217
= 131072 кутових значень на один оборот.
Щоб
не виводити
зі
зчитувача кожної стежки кодера окремого
каналу, часто в конструкцію сенсора
поміщають пристрій для послідовної
передачі
сигналів (рис.
11.49).
Н
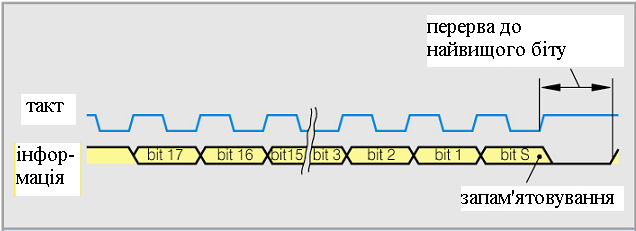
Рис.11.49.
Керування циклом
пересилання
інформації
а першому задньому фронті тактового
сигналу,
який видає приймач, запам’ятовується
значення зчитане через зчитувач.
Передавання даних до приймача наступає
на першому наростаючому фронті тактового
сигналу.
Крім значення кута додатково передається
інформація про помилки коду, наприклад,
що виникають через несправність джерела
світла.
Дискові
кодери можуть передавати закодовані
значення кута послідовно.
Багатодискові
кодери
Щоб
можна було за допомогою дискових кодерів
вимірювати кути,
які перевищують 360°, а отже в діапазоні
декількох оборотів, об’єднують через
редукторну

Рис.11.50.
Багатодисковий кодер
передачу два або більше
кодових дисків (рис.
11.50).
Наприклад, перший диск містить
три тетради коду BCD, для 1000 кутових
значень.
Через редуктор 1:100 приводиться
другий кодовий диск, з двома тетрадами
коду BCD. Завдяки
цьому однозначно можна закодувати 100
оборотів
по 1000 кутових значень, а отже 100000 позицій.
Якщо такий сенсор приєднати через гайку
гвинтової передачі
з кроком різьби
10 мм,
то гайка передачі переміститься
на віддаль 100 • 10 мм
= 1 м
і перейде через
100000 позицій. Отже роздільна здатність
досягне значення 1
/100 000 м
= 0,01 мм.
Дискові
кодери відображають через узор коду
абсолютне значення кутового положення.

