Лекція 11
Тема: Сенсорика.
Аналогові сенсори:
сенсори положення, кута, віддалі та товщини;
давачі швидкості;
сенсори розтягу, сили, обертового моменту i тиску;
сенсори прискорення;
сенсори температури.
Бінарні сенсори.
Цифрові сенсори. Iнкрементальні сенсори положення.
Кодові лінійки і диски абсолютних сенсорів.
У системах керування, регулювання, нагляду і гарантії використовуються різного виду сенсори (давачі), які інформують про роботу і стан машин та обладнань, що реалізують відповідний процес. В залежності від виду вихідних сигналів, сенсори поділяються на аналогові, бінарні та цифрові.
Аналогові сeнсори
З
Рис.11.1.
Поступальний потенціометр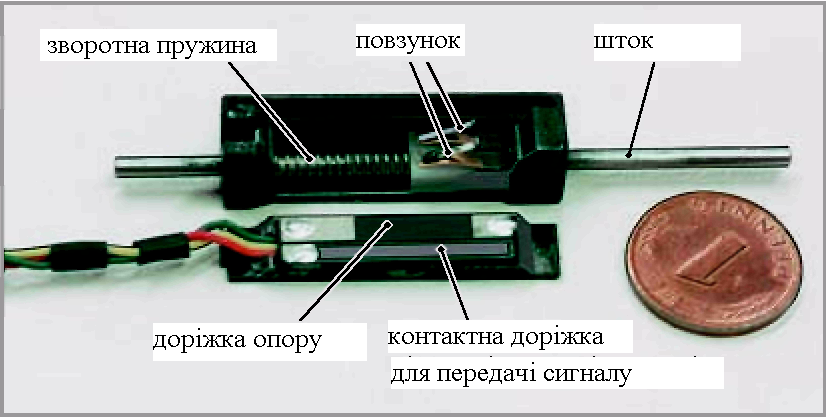
У випадку спостереження, сенсори можуть використовуватись як вимірювальні перетворювачі.
П
Рис.11.2.
Обертальний потенціометр
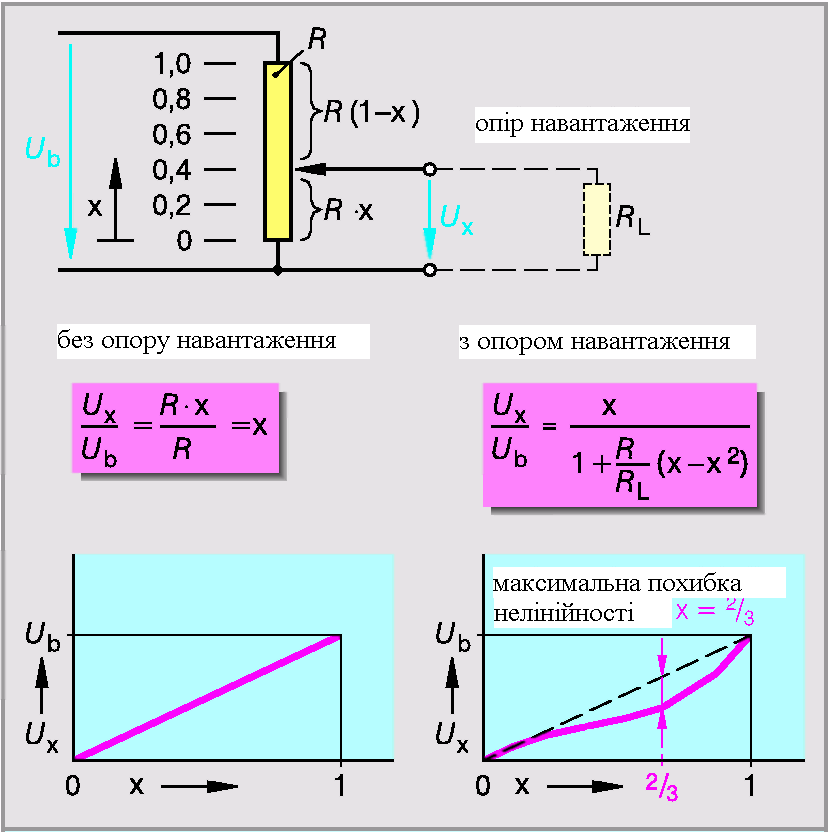
Рис.11.3.
Потенціометр як
подільник напруги
Сенсори положення, кута, віддалі та товщини
Потенціометричні контактні сенсори
При пересуванні ковзного контакту в поступальному потенціометрі або повороту контакту в обертальному потенціометрі змінюється його опір (рис. 11.1) і (рис. 11.2). Використовуючи потенціометр як подільник напруги отримуємо сигнал напруги Ux, який залежить від поступального або кутового переміщення контакту (рис. 11.3). Коли потенціометр ненавантажений або мало навантажений (RL >> R), наприклад, під час під’єднання до нього цифрового вольтметра або вимірювального підсилювача, вихідний сигнал напруги пропорціональний поступальному або кутовому переміщенню контакту. При струмовому навантаженні залежність між переміщенням і вихідним сигналом нелінійна.
У вимірювальних потенціометрах шар опору виконаний з провідної синтетики, яка стійка до стирання – дозволяє виконати до 108 ковзань. Контакти виконуються з дорогоцінних металів в багатопальцевому вигляді, з еластичними амортизаторами коливань. Нелінійність типового потенціометра не перевищує 1 %. Довжина відомих поступальних потенціометрів є у межах від 10 мм до 2 м. Обертальні вимірювальні потенціометри мають діапазон вимірювання від 0° до 360°.
Поступальні
потенціометри застосовуються як
перетворювачі, наприклад,
для вимірювань положення частин машин.
Обертальні потенціометри застосовую
Рис.11.4.
Магніторезисторний
потенціометр
Бeзконтактні потенціометричні сенсори
В
Рис.11.5.Структура,
схема
сполучень і
характеристика
магніторезисторного
обертального
сенсора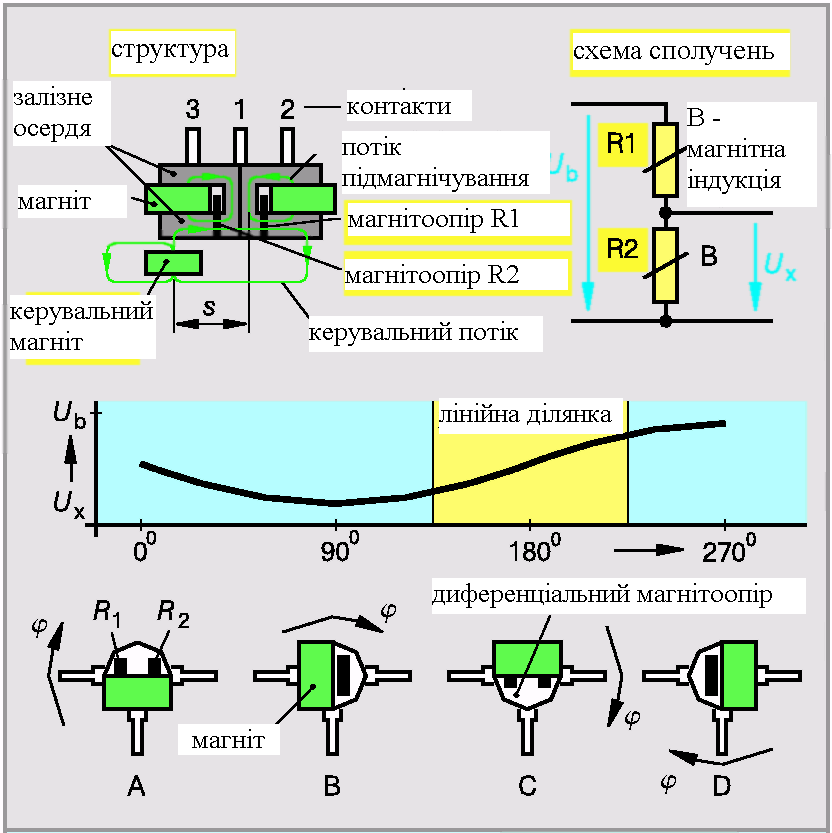
У випадку наближення керувального магніту, збільшується напруженість магнітного поля в околі магніторезистора R1, тоді як напруженість магнітного поля в околі магніторезистора R2 зменшується. Завдяки цьому опір R1 збільшується, а опір R2 зменшується (рис. 11.5). Відповідно до співвідношення опорів змінюється вихідний сигнал сенсора. Ця безконтактна зміна опору уможливлює безконтактну будову сенсора. Похибку зумовлює тільки опір тертя в опорах. Помилка на лінійній ділянці характеристики становить біля 2 %.
Обертальні магніторезисторні потенціометри використовуються для вимірювання коливань, для контролю положення підшипників, як давачі положення у відповідальних системах керування в педалях гальм та руху транспортних електричних засобів.
П
Рис.11.6.
Індуктивний сенсор
положення зі
схемою перетворення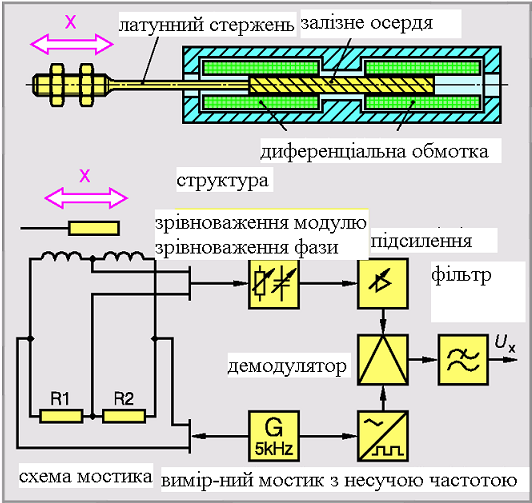
Індуктивні сенсори положення з феритовим осердям
В індуктивних сенсорах положення чутливим елементом є диференціальна обмотка на залізному осерді (рис. 11.6). Коли залізне осердя знаходиться посередині сенсора, опір обидвох частин обмотки однаковий. Якщо осердя пересувається вліво, збільшується індукція лівої половини обмотки і зменшується правої. Одночасно з цими змінами відповідно змінюються імпеданси в обидвох частинах обмотки.
Визначення змін імпедансів відбувається за допомогою вимірювального мостика змінного струму (рис. 11.6). Він складається з напівмостика опорів, який доповнений імпедансами до повного моста, генератора змінного струму частотою 5 кГц, який живить мостик, системи врівноваження модуля і фази для виставлення нуля, підсилювача та демодулятора-випростувача.
Під час пересування залізного осердя рівновага мостика порушується, при цьому виникає поперечна напруга Ux~. Щоб визначити зміну положення на підставі зміни напруги Ux~, необхідна демодуляція сигналу через випрямлення. З цією метою вивертається фаза кожної парної півхвилі генерованої напруги (рис. 11.7).
Індуктивні сенсори виконуються як стержневі або штовхальні для переміщень від 1 мм і до 1 м. У штовхальній версії стержень підпирається пружиною. Роздільна здатність вихідного сигналу становить біля 0,1 %, тобто при номінальному діапазоні переміщення 10 мм ще може бути розпізнана зміна положення порядку 10 мкм. Лінійність становить біля 1 %, тобто при номінальному діапазоні переміщень 10 мм похибка становить біля 100 мкм.
Індуктивні
сенсори положення застосовуються для
вимірювання товщини деталей, як
перет
Рис.11.7.
Демодуляція через
випрямлення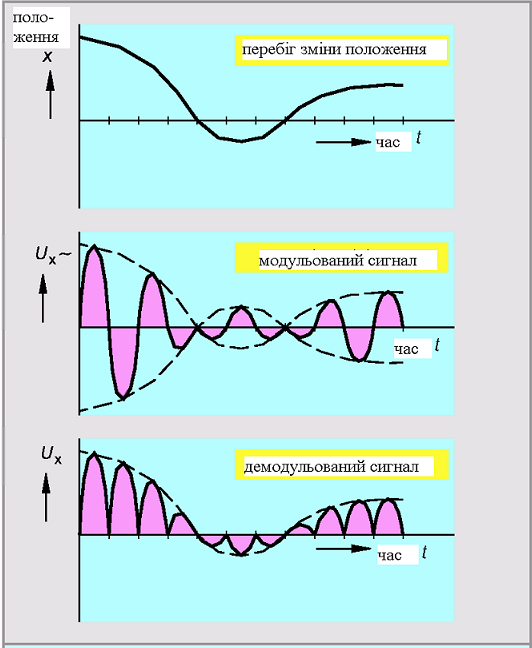
Індуктивні сенсори положення
П
Рис.11.8.
Безконтактний індуктивний
сенсор положення
Сенсор
зміни власної індуктивності (FLDT,
англ.
Fast
Linear
Displacement Transducer
= швидкий лінійний перетворювач
переміщень) складається з циліндричної
котушки з феритовим екраном, вбудованої
у втулку з благородної сталі (рис.
11.9).
В котушку входить рухома алюмінієва
трубка з товщиною стінок біля 1 мм.
Котушка живиться змінним струмом
частотою біля 100 кГц.
Створюване високочастотне магнітне
поле наводить в зовнішньому шарі
алюмінійової трубки вихрові струми,
які згідно з правилом Ленца, нейтралізують
магнітне поле в частині зануреної в
сенсор
Рис.11.9.
Сенсор зміни власної
індуктивності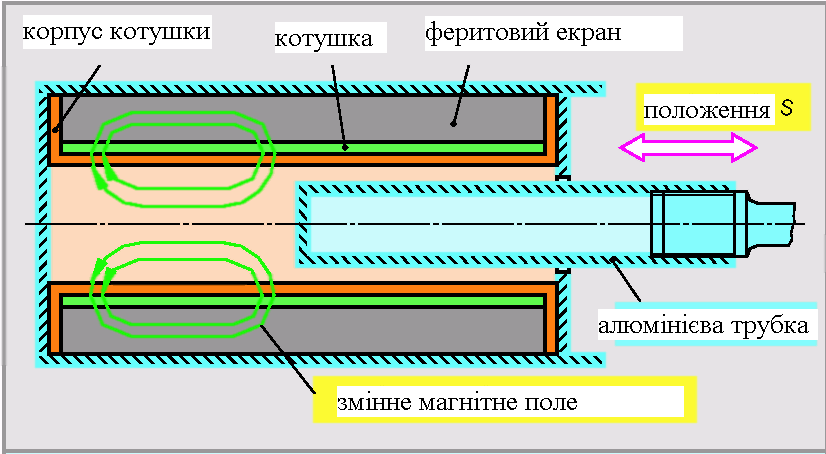
Сенсор зміни взаємної індуктивності – трансформаторний
(
Рис.11.10.
Трансформаторний сенсор
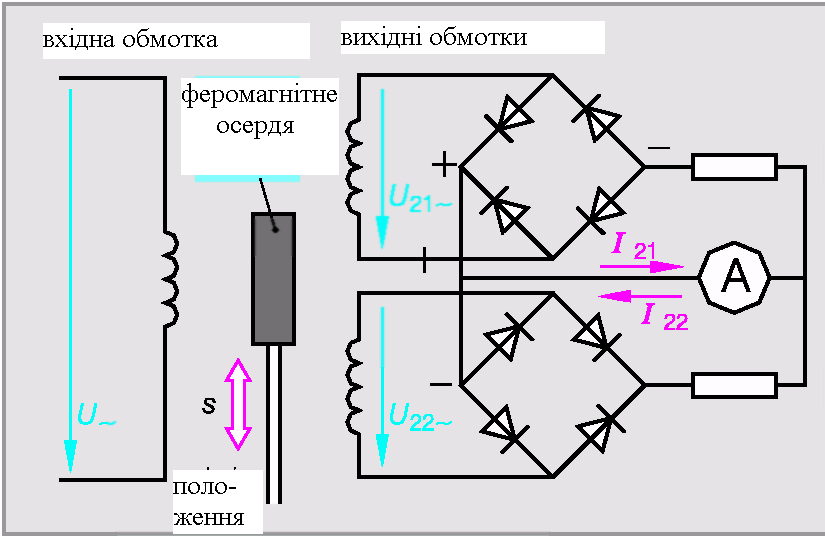
В дуже спрощеній вимірювальній системі (рис. 11.11) кожна з вихідних напруг випрямляється в одному з двох протилежних мостикових систем. Результуючі струми І21 i І22 протікають через вимірювач струму А, який – у випадку однакових вихідних напруг – показує нульове значення. При пересуванні осердя ці струми приймають різні значення. Показ вимірювача струму відповідає величині переміщення осердя, знак - напрямку переміщення.
Т
Рис.11.11.
Диференціальний
трансформатор
зі спрощеною
схемою вимірювання