

2. Краткие сведения о модальном управлении
Задачей модального управления является определение коэффициентов безынерционных обратных связей по измеряемым переменным состояния объекта. Основное достоинство такого управления состоит в том, что в силу безынерционности синтезируемых обратных связей порядок замкнутой САУ не повышается и остается равным порядку самого объекта, что способствует повышению быстродействия САУ.
В данной курсовой работе объект управления (система Г-Д) имеет третий порядок, поэтому "стандартный" полином имеет вид:
 (2.1)
(2.1)
где:
 -
стандартные коэффициенты, численные
значения которых и соответствующие им
переходные характеристики приведены
на рис.2;
-
стандартные коэффициенты, численные
значения которых и соответствующие им
переходные характеристики приведены
на рис.2;
 -
масштабный коэффициент времени,
зависящий от параметров объекта и
вычисляемый в ходе работы.
-
масштабный коэффициент времени,
зависящий от параметров объекта и
вычисляемый в ходе работы.
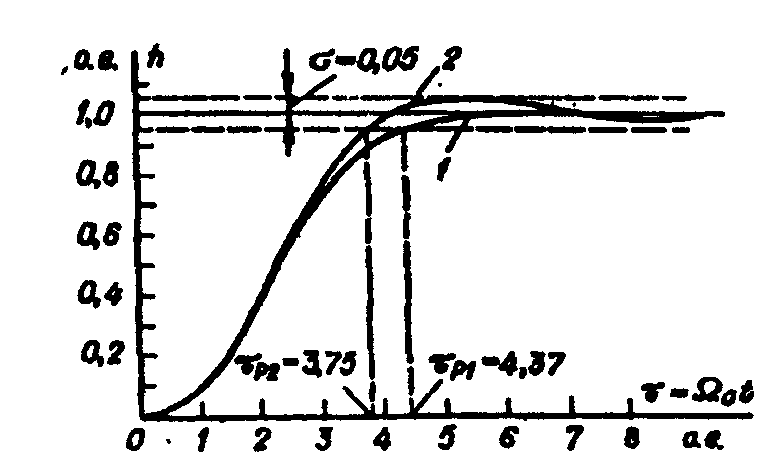
Рисунок 2
1 - для полинома с коэффициентами k2C = 2.049, k1C = 2.397
2 - для полинома с коэффициентами k2C = k1C = 2.155
модальное управление электропривод ток
3. Выбор основных элементов сау и расчет их параметров
3.1 Выбор электродвигателя
Все параметры электродвигателя представлены далее, в таблице 2.
Отмечу, что приведенные сопротивления обмоток электрических машин даются в справочной литературе при температуре 20°С. Во всех дальнейших расчетах будут использованы значения сопротивлений, приведенных к рабочей температуре 75°С, по формуле:
 (3.1)
(3.1)
Таблица 2 - Параметры заданного электродвигателя
Параметры |
Обозначение |
Значения (при 20 0 для R) |
Значения (при 75 0 для R) |
|
|||
Тип электродвигателя |
П72 |
|
|
||||
|
|
12,5 |
|
||||
|
|
1000 |
|
||||
|
|
220 |
|
||||
|
|
78 |
|
||||
|
|
1,6 |
|
||||
|
|
2 |
|
||||
|
|
73,0 |
|
||||
|
|
0,237 |
0,28914 |
||||
|
|
108 |
131,76 |
||||
|
|
0 |
|
||||
3.2 Выбор генератора
Генератор постоянного тока выбираем по мощности и току якоря из условий:
 ;
;

Параметры подходящего генератора занесены в таблицу 3.
Таблица 3 - Параметры выбранного генератора
Параметры |
Обозначение |
Значения (при 20 0 для R) |
Значения (при 75 0 для R) |
|
|||
Тип генератора |
П81 |
|
|
||||
|
|
27 |
|
||||
|
|
1450 |
|
||||
|
|
220 |
|
||||
|
|
122 |
|
||||
|
|
0,52 |
|
||||
|
|
2 |
|
||||
|
|
86 |
|
||||
|
|
21,5 |
|
||||
|
|
61,8 |
75,396 |
||||
|
|
0,0057 |
0,006954 |
||||
|
|
0,09 |
0,1098 |
||||
|
|
0,0311 |
0,037942 |
||||
Номинальный ток генератора рассчитываем по формуле:
 (3.2)
(3.2)
Расчет значений сопротивлений обмоток двигателя и генератора для рабочей температуры, равной 75 0, выполню по формуле (3.1):
( )
∙ 1,22 = 0,237 ∙ 1,22 = 0,28914 Ом (3.3)
)
∙ 1,22 = 0,237 ∙ 1,22 = 0,28914 Ом (3.3)
 ∙1,22
= 108 ∙ 1,22 = 131,76 Ом (3.4)
∙1,22
= 108 ∙ 1,22 = 131,76 Ом (3.4)
 ∙1,22
= 61,8 ∙ 1,22 = 75,396 Ом (3.5)
∙1,22
= 61,8 ∙ 1,22 = 75,396 Ом (3.5)
 ∙1,22
= 0,0057 ∙ 1,22 = 0,006954 Ом (3.6)
∙1,22
= 0,0057 ∙ 1,22 = 0,006954 Ом (3.6)
 ∙1,22
= 0,09 ∙ 1,22 = 0,1098 Ом (3.7)
∙1,22
= 0,09 ∙ 1,22 = 0,1098 Ом (3.7)
 ∙1,22
= 0,0311 ∙ 1,22 = 0,037942 Ом (3.8)
∙1,22
= 0,0311 ∙ 1,22 = 0,037942 Ом (3.8)
Полученные значения занесены в таблицы 1 и 2.