

Урок № 12. Виконавчі механізми. Двопозиційні виконавчі механізми, електромагнітне реле. Електропривід, гідро-і пневмопривід. Виконавчі механізми Виконавчі пристрої
Для здійснення впливу системи автоматичного керування на об’єкт керування призначені виконавчі пристрої або механізми. Якщо датчики перетворюють фізичні величини, що характеризують об’єкт керування, в електричний сигнал, то виконавчі пристрої здійснюють обернену дію, перетворюють сигнал системи керування у фізичну величину, що змінює перебіг технологічного процесу в потрібному напрямі. У сучасних автоматичних системах керування основні операції обробки інформації виконує комп'ютер або мікропроцесор, тому виконавчі пристрої мають здійснювати перетворення цифрового вихідного сигналу комп'ютера у фізичну величину. Наприклад, у станках з числовим програмним управлінням (ЧПУ) вихідний цифровий сигнал з керівного мікропроцесора перетворюється у переміщення робочого органу станка (різця, фрези тощо) і переміщення деталі, що обробляється на цьому станку. У хімічних процесах цифровий сигнал перетворюється у переміщення робочих органів, що регулюють надходження вхідних реагентів, температуру в реакторі тощо.
У складі виконавчого пристрою можна виділити дві частини: малопотужну частину, яка складається з перетворювача і підсилювача і потужну частину, що складається з потужного перетворювача і вихідного виконавчого механізму. В деяких виконавчих механізмах окремі частини можуть бути відсутніми.
По джерелах енергії виконавчі механізми підрозділяють на наступні три основних типи: електричні — перетворюючі електричну енергію в механічну Гідравлічні, у яких застосовується рідина, наприклад мінеральне масло, і тиск рідини перетвориться в механічну енергію; пневматичні, у яких енергія стисненого газу перетвориться в механічну енергію.
Крім того, є виконавчі механізми, що використовують комбінації названих.
Управління виконавчими механізмами здійснюється від ЕОМ через підсилювачі потужності електричних сигналів. Крім того, безпосередньо до виконавчого пристрою може підводитись енергія від додаткового джерела.
Виконавчі механізми характеризуються такими параметрами, як: точність, робочий діапазон, швидкодія, потужність, габарити тощо. Виконавчі механізми поділяються на двопозиційні (бінарні) й аналогові.
Двопозиційні (бінарні) виконавчі механізми
У системах автоматичного керування досить поширені бінарні виконавчі механізми. За родом фізичної величини двопозиційні виконавчі пристрої поділяються на електричні, механічні, гідравлічні, пневматичні тощо.
Електричні двопозиційні виконавчі пристрої це: вимикачі, перемикачі, комутатори, контактори, реле тощо.
Потужність вихідних сигналів комп'ютера дуже мала (<100 мВт), тому безпосередньо подавати такий сигнал на виконавчі пристрої не можна. їх необхідно спочатку підсилити. Для цього використовуються керовані вимикачі.
Електромагнітні реле
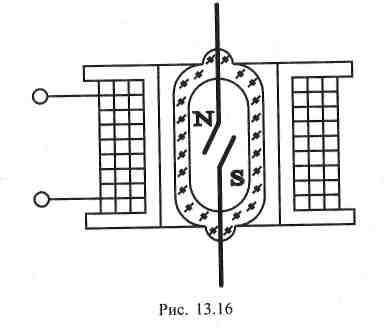
До винайдення і застосування на практиці напівпровідникових приладів як керований вимикач застосовувалися електромагнітні реле, які продовжують широко використовуватися і в наш час. Електромагнітне реле (рис) складається з електромагніта, по обмотці якого протікає струм керування, і контактів, що механічно переміщуються під дією магнітного поля, створеного електромагнітом, замикаючи чи розмикаючи електричне коло виконавчого пристрою.
Таким чином, за допомогою електромагнітного реле можна керувати значними струмами, використовуючи незначні.
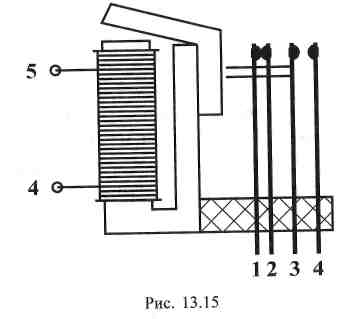
Широкого застосування набули малогабаритні без'якірні електромагнітні реле постійного струму з магнітокерованими герметизованими контактами, так звані геркони. Геркон (рис.) складається зі скляного балона, всередині якого створено технічний вакуум і розміщено пружні феромагнітні елементи з електричними контактами.
Напівпровідникові вимикачі. Для керування деякими пристроями, наприклад, для керування виконавчими двигунами на основі широтно-імпульсної модуляції, необхідно забезпечити перемикання струмів в електричних колах з швидкодією у кілька мікросекунд. Електромагнітні реле неспроможні забезпечити таку швидкодію, тому застосовують напівпровідникові прилади: біполярні і польові транзистори та тиристори.
Тяговий електромагніт. Тяговий електромагніт складається з обмотки, магнітопроводу і рухомого штока, який є частиною магнітопроводу. Якщо по обмотці пропустити електричний струм, то на шток діятиме сила, спрямована так, щоб зазор зменшувався. Тяговий електромагніт — це виконавчий пристрій для перетворення електричного сигналу в механічне переміщення штока.
Клапани. У багатьох технологічних процесах, наприклад у хімічній промисловості, потрібно керувати подачею рідин і газів. Для цього на трубопроводах подачі встановлені клапани, які діють таким чином: якщо встановити клапан у закрите положення, то подача рідини або газу припиняється, а якщо у відкрите — то відновлюється. Для переміщення клапана застосовуються електричний, гідравлічний або пневматичний приводи.