

Определение основных показателей качества регулирования скорректированной системы
Автоматическая система регулирования является динамической системой, нормальным режимом которой следует считать установившийся режим динамического равновесия. Задача САР заключается в восстановлении установившегося режима протекания технологического процесса при его отклонениях от динамического равновесия в результате действия различных возмущений. Работа любой САР при наличии возмущений характеризуется качеством процесса регулирования.
Оценка качества может быть определена по переходной характеристике автоматической системы. Форма кривых переходных процессов зависит как от динамических свойств, входящих в систему элементов, так и от настроек регулятора.
В устойчивой системе переходной процесс должен носить затухающий характер. Автоматическая система также должна обеспечивать заданную статическую точность, т.е. регулируемый параметр с течением времени должен быть возвращен регулирующим воздействием к заданному значению с определенной степенью точности, которая определяется статической ошибкой.
Схема замкнутой системы управления:

Передаточная
функция:
![]()
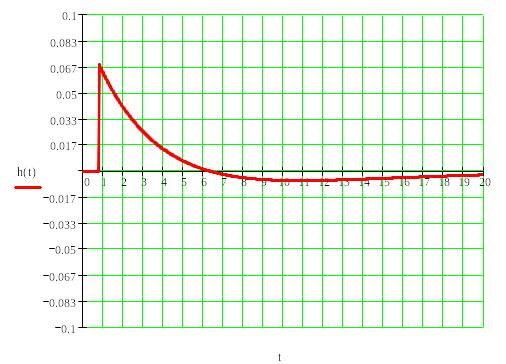
Переходная характеристика скорректированной системы:
![]()
Определение устойчивости по амплитуде и фазе скорректированной системы

![]()
![]()

Система абсолютно устойчива, так как ФЧХ никогда не достигнет значения –π.
Выводы по анализу и синтезу заданной системы автоматического регулирования
В результате расчёта курсовой работы была разработана система удовлетворяющая заданным условиям: ΔL>6дБ, Δφ>30º
Литература.
Сборник задач по теории автоматического регулирования и управления. Под. редакцией Бесекерского В.А. М., «Наука», 1975.
Бесекерский В.А. Попов В.П. Теория автоматического регулирования. М., «Профессия», 1975.
Попов Е.П. Теория линейных систем автоматического регулирования и управления. М., «Наука», 1978.
Смирнов М.Е. Методические указания к выполнению курсового проекта по дисциплине «Теория автоматического регулирования». ЛТИХП, 1979.
Смирнов М.Е. Приложения к методическим указаниям для курсового проектирования. ЛТИХП, 1979.
Лазарев В.Л. Робастные системы управления в пищевой промышленности. СПб., СПбГУНиПТ, 2003.
Д3065.