

Расчёт и построение переходного процесса замкнутой сар
Под системой автоматического регулирования понимают совокупность автоматического регулятора и объекта, взаимодействующих между собой в процессе работы. САР представляет собой замкнутую цепь, так как процесс регулирования характеризуется передачей взаимодействий от одного элемента к другому по замкнутому контуру.
Передаточная функция замкнутой системы:
![]()
Используя преобразования Лапласа, определяем переходную характеристику замкнутой системы:
![]()
График переходной характеристики:

График переходной характеристики замкнутой системы автоматического регулирования представляет собой синусоиду с возрастающей амплитудой, поэтому можно сделать вывод, что система неустойчива.
Синтез сар с заданными свойствами
Основная цель инженерного синтеза автоматических систем состоит в обеспечении требуемой точности и приемлемого характера переходных процессов. Требуемая точность может быть достигнута увеличением общего коэффициента усиления разомкнутой системы и, в случае необходимости, повышением порядка астатизма (за счёт введения изодромных устройств) или переходом к комбинированному регулированию с компенсацией возмущающих воздействий.
Определим устойчивость располагаемой системы с помощью критерия Найквиста.
Передаточная функция разомкнутой системы:
![]()
АЧХ разомкнутой
системы:
![]()
ФЧХ разомкнутой
системы:
![]()
ЛАХ разомкнутой
системы:
![]()
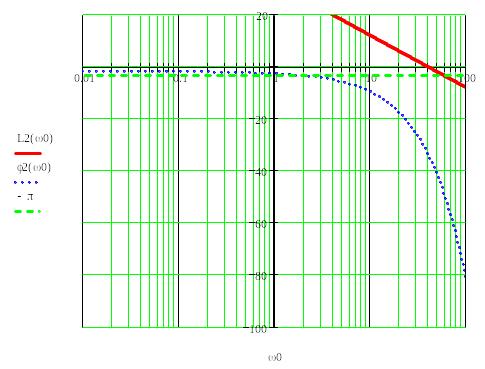
По критерию Найквиста система устойчива в том случае, если ЛАХ достигает значения –π раньше, чем фаза.
Из графика видно, что ФЧХ достигает –π раньше, чем ЛАХ, поэтому разомкнутая система неустойчива.
Повышение устойчивости и получение требуемого быстродействия достигается рациональным выбором параметров системы и введением в нее специальных устройств – корректирующих устройств. Корректирующие устройства представляют собой динамические звенья с определенными передаточными функциями. Действие этих устройств сводится к созданию в системе дополнительных воздействий по производным и интегралам от ошибки рассогласования в контуре САР, приводящих к улучшению показателей качества регулирования.
Задачу получения требуемых качественных показателей можно наглядно трактовать как задачу коррекции (деформации) АФЧХ разомкнутой системы в нужном направлении.
Включение корректирующих звеньев в автоматическую систему может быть выполнено различными способами: последовательно с основными звеньями регулятора, параллельно или в виде обратной связи.
Для определения
вида и параметров корректирующего
устройства при синтезе минимально –
фазовой автоматической системы
регулирования удобно использовать
метод логарифмических частотных
характеристик. В этом случае ЛАХ полностью
определяет характер переходных процессов
и нет необходимости вводить в рассмотрение
фазовую характеристику. Если
![]() - желаемая передаточная функция
разомкнутой системы,
- желаемая передаточная функция
разомкнутой системы,
![]() - располагаемая и
- располагаемая и
![]() -
передаточная функция корректирующего
звена последовательного типа, то желаемая
передаточная функция:
-
передаточная функция корректирующего
звена последовательного типа, то желаемая
передаточная функция:![]()
Для того чтобы
величина перерегулирования не превышала
25% надо, чтобы ЛАХ пересекала частоту
среза
![]() с
наклоном -20дБ/дек. Чем больше длина этого
участка, тем больше запасы устойчивости
по фазе
с
наклоном -20дБ/дек. Чем больше длина этого
участка, тем больше запасы устойчивости
по фазе
![]() и по амплитуде
и по амплитуде
![]() .
Длину участков определяем по номограммам
(L1=16дБ,
L2=-16дБ).
Сопряжение низкочастотного и
среднечастотного участков и среднечастотного
с высокочастотным осуществляем набором
прямых, имеющих наклон, кратный -20дБ/дек,
исходя из удобства последующей
практической реализации.
.
Длину участков определяем по номограммам
(L1=16дБ,
L2=-16дБ).
Сопряжение низкочастотного и
среднечастотного участков и среднечастотного
с высокочастотным осуществляем набором
прямых, имеющих наклон, кратный -20дБ/дек,
исходя из удобства последующей
практической реализации.
Частоту среза
принимаем
![]() .
.
ЛАХ корректирующего
устройства можно найти следующим
образом:
![]() .
Исходя из этого условия строим ЛАХ
корректирующего устройства.
.
Исходя из этого условия строим ЛАХ
корректирующего устройства.
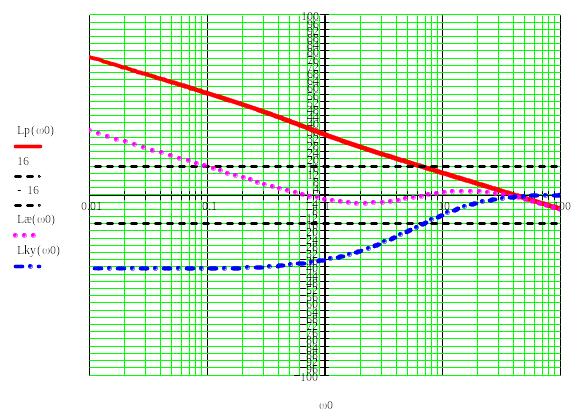
По графику определяем
передаточную функцию корректирующего
устройства:
![]()
Передаточная функция разомкнутой скорректированной системы:
![]()