

Структура технической диагностики
Техническая диагностика:
Теория распознавания
Алгоритмы распознавания
Правила решения
Диагностика модели
Теория контролеспособности
Контроль состояния
Поиск неисправности
Средства и методы получения диагностической информации
Лекция 19.10.2012 Классификация систем диагностики
По степени общности даваемой информации
Локальные, т.е. оценка состояния узлов и деталей
Общие, т.е. диагностика в целом
По характеру взаимодействия с объектом
Тестовые – формирование воздействия и исследование отклика на это воздействие
Функциональные – регистрируют информацию об объекте в процессе функционирования
В случае создания автоматизированной системы диагностирования необходимо решить следующие задачи:
Разработка мат. модели функционирования объекта
Разработка мат. модели повреждений и отказов
Разработка алгоритмов для диагностирования в соответствии с поставленной задачей – обнаружение неисправностей и отказов, отличие неисправного оборудования от работоспособного, поиск места дефекта
Цели технической диагностики
Основная цель – повышение ресурса и надёжности технических систем для обеспечения отсутствия отказов во время функционирования.
Дальше пропущено 4 листа по диагностике (вопросы 21-24)
Лекция 22.10.2012
Отсутствие признака K1
Отсутствие приз.

Теперь вычислим вероятность для случая, когда оба признака отсутствуют.
Формула для
события

Для отсутствия
 и наличия
и наличия
 :
:
0,05*0,8*0,3/…


Метод последовательного анализа
Предложен учёным Вальдом. Применяется для дифференциальной диагностики (распознавания двух состояний). В отличии от метода Баеса, число обследований заранее не устанавливается, их проводится столько, сколько необходимо для принятия решения с определённой степенью риска.
При использовании метода Баеса для распознаваний состояний D1 и D2 следует составить соотношение

Если
![]()
Или
![]()
то принимается
решение
 .
.
В методе последовательного анализа рассматриваемые отношения вероятностей признаков (отношения правдоподобия) составляются не сразу, а в последовательном порядке, поэтому обычно требуется меньшее число обследований.
Пример: Пусть при
диагнозе D1 Признак k1 встречается с
вероятностью
 .
Соответственно отсутствует с вероятностью
.
Соответственно отсутствует с вероятностью
 .
.
Если у объекта состояние K* наблюдается признак K1 значительно чаще, при диагнозе D2, чем при диагнозе D1, то можно сделать вывод в пользу диагноза D2.


где A – верхняя граница принятия решения.
В противоположном случае, когда признак K1 значительно чаще встречается при диагнозе D1, принимается решение в пользу диагноза D1.
P(K1/D2)/P(K1/D1) <B
Если B< P(K1/D2)/P(K1/D1) <A, то для решения требуется поступление доказательной информации, проводится обследование по признаку K2 и составляется произведение двух отношений правдоподобия
![]()
Методы статистических решений для одного диагностического параметра
Пусть производится диагностика состояния какого-либо объекта по параметру x. Задача состоит в выборе x0 таким образом, что при x>x0 следует принимать решение о снятии двигателя с эксплуатации, а при x<x0 допускать дальнейшую работу. D1 – исправен; D2 – дефект.
При x<x0 K
 D1
D1
При x>x0 K D2
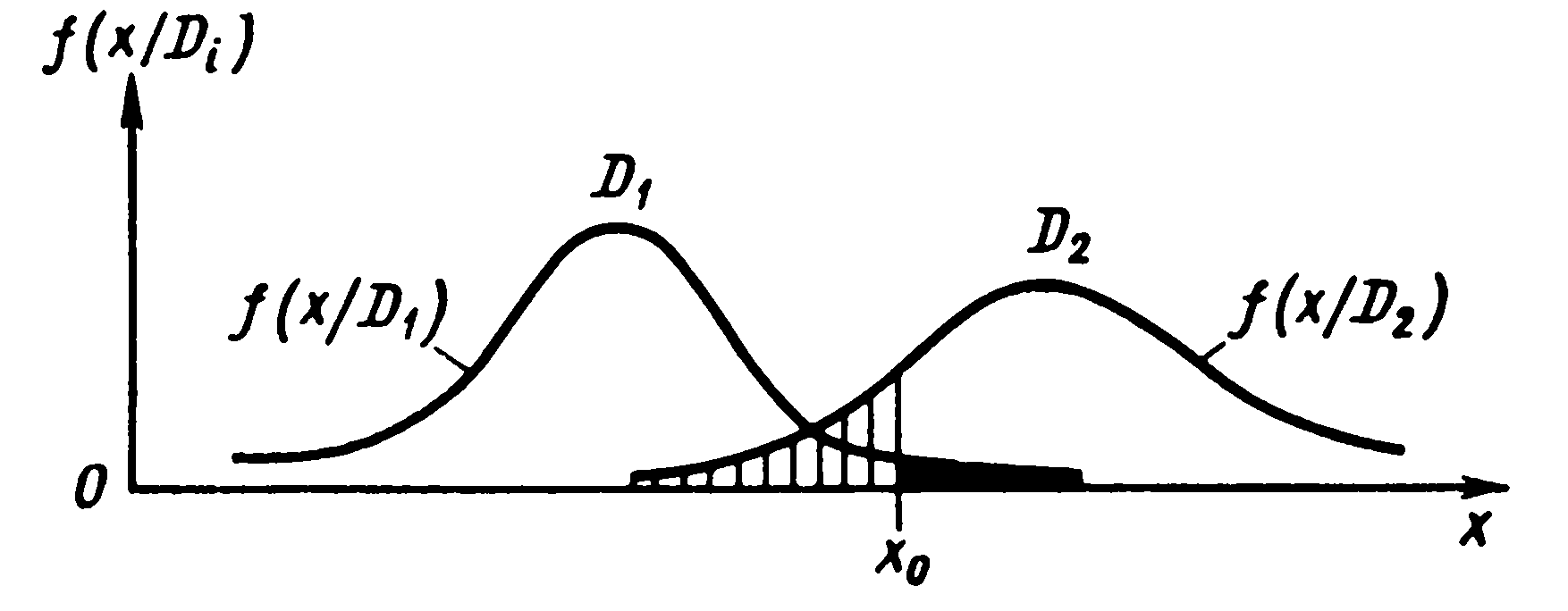
Области исправного и дефектного состояния D1 и D2 пересекаются, поэтому невозможно выбрать значения x0 при котором решающее правило не давало бы ошибочных решений. Задача состоит в том, чтобы x0 был в каком то роде оптимальным, например давал бы минимальное число ошибочных решений.
Введём понятия:
1) «ложная тревога»: случай, когда применяется решение о наличии дефекта, но в действительности система находится в исправном состоянии (вместо D1 принимается D2).
2) «пропуск цели» (дефекта) – принятие решения об исправном состоянии, тогда как система содержит дефект (вместо D2 принимается D1)
Введём обозначение
 ,
где первый индекс – номер принятого
значения, второй индекс – действительное
состояние.
,
где первый индекс – номер принятого
значения, второй индекс – действительное
состояние.
Тогда H12 – пропуск дефекта, H21 – ложная тревога.
H11 и H22 – это правильные решения.
Рассмотрим вероятность P(H21).
Вероятность ложной тревоги равна вероятности произведения двух событий: «наличие исправного состояния» и «x>x0»
Вероятность того, что событие D1 умножить на то, что мы приняли, что сейчас событие D2:
P(H21)=P(D1)*P(x>x0/D1)


Т.е. вер того что x>x0 при D1 это правая половинка заштрихованной площади.
Средний риск – вероятность принятия ошибочного решения слагается из вероятностей ложной тревоги и пропуска дефекта. Если приписать «цены» этим ошибкам, то получим выражение для среднего риска

Обычно принимается С12>>С21, т.к. стоимость пропуска дефекта существенно больше стоимости ложной тревоги.
Ингода вводится цена правильных решений H11 и H22, тогда
 (*)
(*)
С11 и С22 принимаются отрицательными.