

Тема 3. Методи розв’язування злп
2.3.1. Графоаналітичний метод розв’язування злп
Можна виділити два способи графоаналітичного розв’язування ЗЛП: повний перебір кутових точок; напрямлений перебір кутових точок, або градієнтний спосіб.
Спосіб повного перебору складається з таких етапів.
Побудова множини планів ЗЛП “
 ”
та її оцінка:
”
та її оцінка:якщо “ ” = Æ (порожня множина), розв’язку немає;
якщо “ ” – опукла многогранна область, спосіб неприйнятний;
якщо “ ” – опуклий многокутник переходять до етапу 2.
Визначення координат кутових точок “ ”.
Обчислення значень цільової функції в кожній кутовій точці і визначення точок екстремуму:
якщо потрібного екстремуму досягнуто в одній кутовій точці, то розв’язок ЗЛП єдиний і координати цієї кутової точки – оптимальний план;
якщо потрібного екстремуму досягнуто в двох кутових точках, то ЗЛП має незліченну множину розв’язків, якими є координати будь-якої точки відрізка, що з’єднує всі кутові точки.
Приклад №1. Розв’язати способом повного перебору таку ЗЛП.

Розв’язання.
1.
Побудова К та його оцінка. Обираємо
систему координат
![]() (рис.2.1). Оскільки
(рис.2.1). Оскільки
![]() та
та
![]() невід’ємні, К лежить у першій чверті.
Зобразимо розв’язок кожної нерівності
окремо. Нерівність
невід’ємні, К лежить у першій чверті.
Зобразимо розв’язок кожної нерівності
окремо. Нерівність
![]() замінимо рівнянням
замінимо рівнянням
 та побудуємо відповідну граничну пряму.
ЇЇ можна побудувати (до того ж лише одну)
за двома точками. Оберемо точки на вісях
координат:
та побудуємо відповідну граничну пряму.
ЇЇ можна побудувати (до того ж лише одну)
за двома точками. Оберемо точки на вісях
координат:
Для зручності подальшого розв’язування прямі пронумеруємо римськими цифрами. Визначаючи напівплощину, в нерівність підставимо координати будь-якої точки, що не лежить на граничній прямій (зручніше «початок координат»). Якщо нерівність виконується, розв’язком є напівплощина, що містить цю точку. В протилежному випадку – інша напівплощина. Стрілками вкажемо відповідні напівплощини.
Аналогічно шукають другу та третю напівплощини:
![]() ;
;
![]() ;
;



Перетином трьох напівплощин та першої чверті є опуклий многокутник OABCD. Спосіб повного перебору можна застосувати.
2.
визначення координат кутових точок К.
Координати кутових точок О, А, D відомо
з побудуви:
![]() ,
,
![]() ,
,
![]() .
.
Щоб знайти координати кутових точок B та С розв’яжемо систему рівнянь відповідно I і ІІІ, ІІ і ІІІ граничних прямих:

![]()

![]()
3. Обчислення значень цільової функції в кутових точках К та визначення точок екстремуму:
![]()
![]()
![]()
![]()
![]()
Оптимальний
план задачі:
![]()
Приклади №2 . Розв’язати градієнтним способом
Можна виділити такі етапи розв’язування ЗЛП градієнтним способом.
Побудова К та його оцінка:
якщо К=Æ1 – розв’язку немає;
якщо К
 Æ1
– перехід до етапу 2.
Æ1
– перехід до етапу 2.
2.
Побудова
![]() ,
тобто
,
тобто
![]()
3. Побудова лінії рівня, що має з К спільні точки.
4. Переміщення лінії рівня в напрямі , якщо розв’язується задача на максимум цільової функції, та в протилежному, якщо розв’язується задача на мінімум цільової функції, доки вона не стане опорною для К. Можливі три випадки:
опорна пряма з К має спільну точку, тоді розв’язком ЗЛП є координати цієї точки;
опорна пряма з К має спільний відрізок, або спільний промінь, тоді розв’язком ЗЛП є координати будь-якої точки цього відрізку або променю, тобто ЗЛП має незліченну множину розв’язків;
пряма не може стати опорною для К, тобто завжди перетинає К, отже, ЗЛП розв’язку не має – цільова функція необмежена на К
Означення Опорною множиною до множини G називається пряма лінія, яка із множиною G має спільну точку або спільний відрізок і всі точки множини G знаходяться по одну сторону від прямої лінії.
Приклад №3.

Із малюнку випливає, що лінія рівня в ході переміщення в напрямі стає опорною до К у точці С. Отже, ЗЛП має єдиний розв’язок

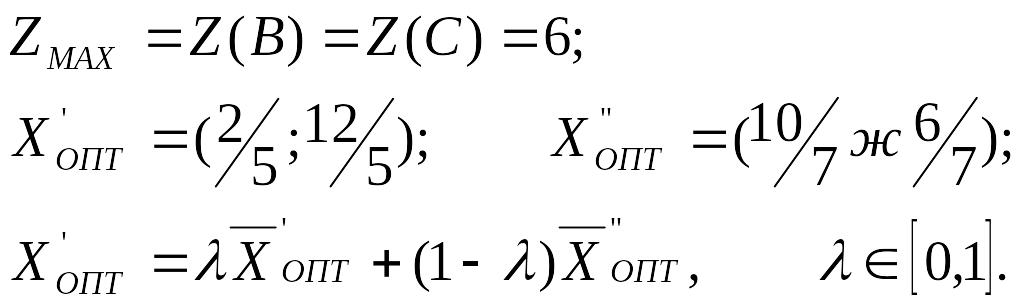
Приклад №4.
Із малюнку випливає, що лінія рівня в процесі переміщення в напрямі стає опорною до К і має з нею спільний відрізок BC. Отже, ця ЗЛП має незліченну множину розв’язків:
Приклад №5.
Лінія рівня не може стати опорною до К, рухаючись у напрямі . Таким чином ЗЛП не має розв’язку.