

48. Подсистема навигационной аппаратуры потребителей
Эта подсистема включает в себя:
антенну, способную принимать сигналы ГЛОНАСС/GPS;
приемоиндикатор, состоящий из приемника ГЛОНАСС/GPS и процессора, приемника корректирующей информации, устройства ввода-вывода информации, сетевого адаптера.
В настоящее время в Мире насчитывается более 200 фирм, занимающихся разработкой и производством НАП СНС. Наибольшую известность получили образцы фирм «Trimble», «Garmin» (США), «Furuno» (Япония), «Sersel» (Франция), «НАВИС», «РИРВ» (РФ). Среди отечественных производителей широкую известность получили НАП ГП «Оризон-Навигация».
49. Источники погрешностей измерений навигационного параметра и выполения обсерваций.
На точность определения координат существенное влияние оказывают погрешности, возникающие при выполнении первичных и вторичных измерений. Природа этих погрешностей различны, а суммарная погрешность складывается из:
погрешности шкалы времени (~ ± 0,6 м);
погрешности вычисления орбит (~ ± 0,6 м);
инструментальной погрешности приемника (~ ± 1,2 м);
многолучевости распространения сигнала (~ ± 2,0 м);
ионосферной задержки сигнала (~ ± 10,0 м);
тропосферной задержки сигнала (~ ± 1,0 м);
геометрического расположения спутников (см. коэффициент GDOP).
50. Методы определения места судна с помощью навигационных спутников.
Местоположение судна определяется координатами трех поверхностей положения или двух линий положения. Иногда (из-за нелинейности) две линии положения могут пересекаться в двух точках. Тогда, для нахождения места судна, необходимо использовать дополнительную поверхность положения или другую информацию о его месте.
Для решения навигационной задачи
используют функциональную зависимость
между навигационными параметрами и
компонентами вектора состояния судна
![]() .
Соответствующие функциональные
зависимости называются навигационными
функциями.
.
Соответствующие функциональные
зависимости называются навигационными
функциями.
Навигационные функции получают различными методами, основные из которых:
дальномерный (А);
псевдодальномерный (Б);
разностно-дальномерный (В);
радиально-скоростной (Г).
Могут быть использованы и другие методы и их комбинации, в том числе и для определения ориентации судна.
51. Дальномерный метод
Дальномерный метод основан на пассивных (беззапросных) измерениях дальности (Di) между i-ым НКА и судном. Навигационным параметром является дальность (Di), а поверхностью положения – сфера с радиусом Di и центром, расположенным в центре масс i-го НКА.
При пересечении сферической изоповерхности с поверхностью Земли получим изолинию, соответствующую измеренной дальности до НКА – окружность сферического радиуса α.
Из треугольника S0ОК (рис. 23.7):
Di2 = R2 + (R + H)2 − 2R · (R + H) · cosα |
(23.14) |
или
|
(23.15) |
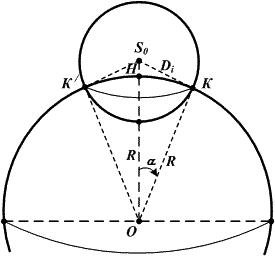
Рис. 23.7. Дальномерный метод получения навигационной функции
Градиент этой изолинии:
g = coshρ |
(23.16) |
где hρ – видимая угловая высота НКА над горизонтом.
Топоцентрическая дальность (Di) может быть измерена пассивным или активным методами.
Пассивный метод состоит в определении Di по времени (t) распространения радиосигнала от НКА до приемника (судна):
Di = c · (t + δt) |
(23.17) |
где δt – поправка к отсчету времени (t) из-за сдвига временных шкал часов НКА и судового приемника.
Для измерения дальности Di пассивным методом с высокой точностью – на НКА и на судне должны быть высокостабильные генераторы частоты.
Активный метод измерения дальности до НКА аналогичен методу измерения расстояния до активного радиолокационного отражателя
|
(23.18) |
Этот метод не требует наличия высокостабильных генераторов частоты на судне. Но в этом методе другая проблема – обеспечение одновременного обслуживания сотен и тысяч потребителей.
Дальномерный пассивный метод применяется в СНС на средневысоких орбитах GPS (США) и ГЛОНАСС (РФ).
Место судна определяют как координаты точки пересечения трех поверхностей положения (трех сфер), вследствие чего для реализации этого метода необходимо измерить дальности до 3-х НКА. Неоднозначность определения координат судна при этом методе устраняется с помощью дополнительной информации (счислимые координаты судна, его радиальная скорость и др.).
Дальномерный метод предполагает, что все измерения дальностей должны быть произведены в одно время. Однако координаты НКА привязаны к бортовой шкале времени, а координаты судна определены в своей шкале. В реальных условиях существует расхождение (t′) этих шкал времени и возникает смещение (D′ = c · t′) измеренной дальности относительно истинной, поэтому точность определения места судна падает. Таким образом, недостатком метода является необходимость высокоточной привязки шкал времени НКА и судна, вследствие чего в настоящее время более широкое применение нашел псевдодальномерный метод определения места.