

Архитектура измерительных систем с мп и микроЭвм
Измерительная система (ИС), предназначенная для автоматического сбора, преобразования и обработки измерительной информации, является одной из составных частей более общего понятия — измерительной информационной системы (ИИС), куда помимо ИС входят также системы автоматического контроля, технической диагностики и распознавания.
В ГОСТ 8.437—81 приведено следующее определение: ИИС — "совокупность функционально объединенных измерительных, вычислительных и других вспомогательных технических средств для получения измерительной информации, ее преобразования, обработки в целях представления потребителю (в том числе ввода в АСУ) в требуемом виде либо автоматического осуществления логических функций контроля, диагностики, идентификации". В ИИС объединяются технические средства, начиная от датчиков, АЦП, каналов передачи и кончая устройствами выдачи информации, а также вычислительные средства с соответствующим программным обеспечением, необходимым как для управления работой собственно системы, так и для решения в ИИС измерительных и вычислительных задач, а также управления конкретным экспериментом.
Обобщенная структурная схема ИИС (рисунок 5) содержит следующие составные части:
1 - группу датчиков (Д), размещенных постоянно в определенных точках объекта исследования, перемещающихся в пространстве (сканирующего типа) или воспринимающих одновременно поле исследуемого объекта;
2 - аналоговые преобразователи (АЛ), содержащие предусилительные и согласующие устройства, фильтры, нормирующие и функциональные преобразователи, аналоговые каналы связи;
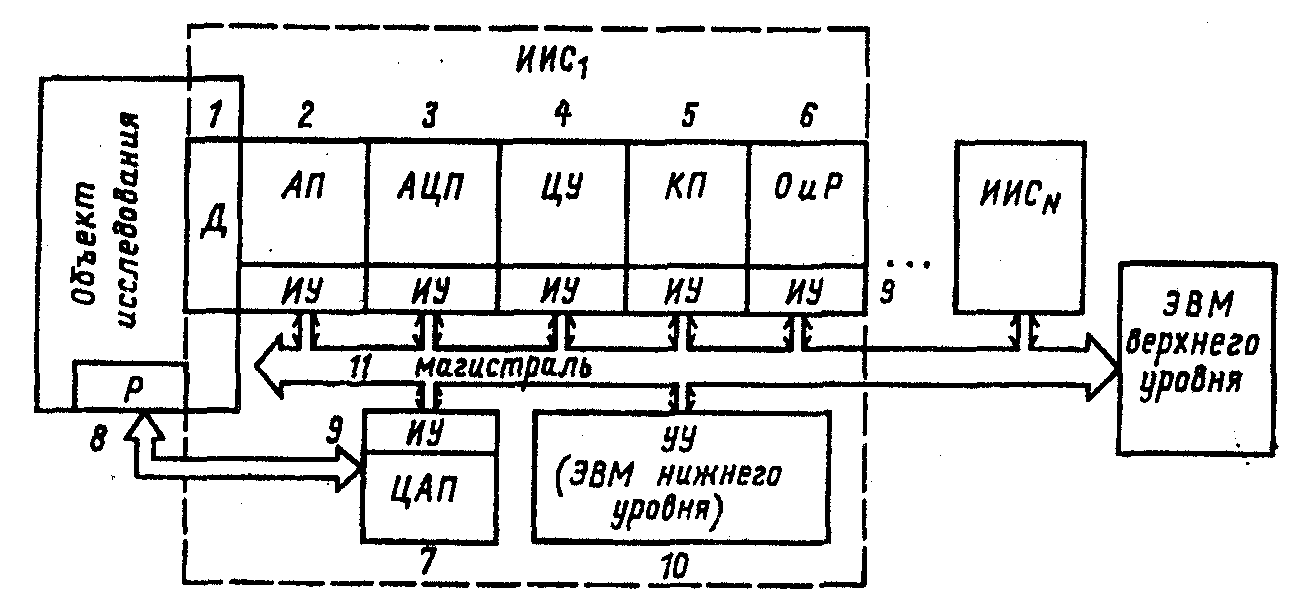
Рисунок 5- Обобщенная структурная схема измерительной информационной системы
3 - аналого-цифровые преобразователи (АЦП) и многоканальные аналоговые коммутаторы, схемы выборки-хранения, компараторы;
4 - цифровые устройства (ЦУ), включающие формирователи импульсов, таймеры, преобразователи кодов, цифровые коммутаторы, специализированные цифровые вычислительные устройства (умножители, быстрые преобразователи Фурье и др.), устройства памяти;
5 - каналы передачи (КП), содержащие каналы цифровой связи, модемы, оптические линии связи, формирователи помехозащищенных кодов;
6 - устройства отображения и регистрации (ОиР) результатов измерения, включающие печатающие устройства, накопители информации на магнитной ленте и дисках, дисплеи, сигнализаторы, цифровые индикаторы;
7 - цифроаналоговые преобразователи (ЦАП) и выходные демультиплексоры, мощные усилители и формирователи выходных импульсов;
8 - регуляторы (Р), включающие различные исполнительные устройства (двигатели, нагреватели, реле и т.д.);
9 - интерфейсные устройства (ИУ) для связи отдельных блоков между собой и с системой;
10 - устройство управления (УУ), реализуемое обычно на базе микропроцессоров или микроЭВМ;
11 - магистраль (М), содержащую как внутрисистемные шины связи, так и устройства, позволяющие объединять отдельные ИИС в локальные сети и иерархические системы.
Конечно, не во всякой ИИС требуется включение всех приведенных на рис.1 блоков. Для каждой конкретной системы или прибора количество блоков, состав функций и связи между блоками должны устанавливаться особо.
На начальной стадии развития автоматизированных ИИС (60-е годы) в них использовались специализированные вычислительные устройства, построенные на дискретной полупроводниковой базе и работающие по жесткой программе. Эта ступень развития средств измерения, сбора и обработки информации соответствовала первому поколению ИИС. Системы первого поколения характеризуются централизованным циклическим получением измерительной информации и обработкой ее с помощью специализированных вычислительных устройств. Дальнейшая обработка информации при необходимости в большинстве случаев проводилась вне ИИС, в универсальных ЭВМ.
Развитие вычислительной техники, появление мини-ЭВМ позволило в конце 60-х - начале 70-х годов перейти от выполнения ряда операций измерения и обработки информации в ИИС аппаратным путем по жесткой программе к гибкому программному их выполнению, к изменению в процессе работы программным путем структуры и состава работающих функциональных блоков системы. Объединение измерительной части и ЭВМ, а также использование в качестве элементной базы микроэлектронных схем малой и средней степени интеграции привело к появлению второго поколения ИИС. Системы второго поколения характеризуются адресным сбором информации, преимущественно программной обработкой информации с помощью ЭВМ, входящей в состав системы, и в меньшей степени с помощью специализированных вычислительных устройств, использованием микроэлектронных схем малой и средней степени интеграции, блочно-модульным принципом построения.
Развитие микропроцессорных средств, БИС и СБИС (включая устройства памяти с большим объемом запоминаемой информации) и стандартных цифровых интерфейсных схем, появление микроЭВМ и резкое возрастание роли программного обеспечения системы привело к появлению третьего поколения ИИС. В этих системах с помощью микропроцессорных средств выполняются сбор, обработка и промежуточное хранение измерительной информации в местах, максимально приближенных к ее получению. Микропроцессор может встраиваться практически в любой блок ИИС, приведенной на рис.1. Распределенный характер процессов сбора и обработки информации делает эти системы децентрализованными. Они отличаются от централизованных ИИС не столько рассредоточенным расположением аппаратуры, сколько распределением функций. Рассредоточение вычислительной мощности по различным уровням и блокам ИИС позволяет уменьшить потоки информации, сократить общее время обработки, повысить надежность работы и живучесть системы.
Кроме того, в децентрализованных системах снижаются затраты на программирование, поскольку раньше, когда микропроцессоры стоили относительно дорого, разработчики аппаратуры стремились загрузить их как можно больше, что вызывало значительное увеличение стоимости и времени программирования. В настоящее время в связи с резким удешевлением микросхем в этом уже нет необходимости, экономически выгоднее увеличивать общее количество микропроцессоров в системе.
В ИИС третьего поколения широко осуществляется многофункциональная обработка измерительной информации благодаря рациональному сочетанию аппаратных специализированных вычислительных средств с жесткой структурой на базе БИС и СБИС и гибких перестраиваемых структур и программ работы на базе МП и микроЭВМ.
Появление микроЭВМ с достаточно высокой производительностью и большой емкостью оперативной памяти позволило перейти к созданию полностью автономных ИИС.
Следует отметить, что новые поколения ИИС часто существуют одновременно с предыдущими, дополняют их, берут от них наиболее важное и рациональное.
Неотъемлемой частью архитектуры любой современной измерительной системы с микропроцессорами или микроЭВМ является ее системное и прикладное программное обеспечение (ПО). Различают два вида системного ПО: внутреннее (резидентное) обеспечение, которое образуют служебные программы, постоянно хранимые в памяти системы и необходимые для разработки прикладных программ, и кросс-программное обеспечение, представляющее собой комплект программ, используемых пользователем на этапе разработки системы или ее модернизации.
Большинство измерительных приборов и систем со встроенными микропроцессорами из-за ограниченной емкости памяти содержат только прикладные программы пользователя.
Комплекс ПО МП измерительной системы обычно включает библиотеку программных модулей, предназначенных для реализации типовых процедур ввода-вывода, преобразования кодов, обработки прерываний, вычисления функций и т.д.
Характерной особенностью ИИС второго и третьего поколений является блочно-модульный принцип их построения, когда отдельные программно-управляемые приборы-модули могут объединяться через общую магистраль (см. рисунок 5) в функционально необходимом сочетании. При этом каждый прибор-модуль может применяться и автономно. Использование приборов-модулей со встроенными микропроцессорами открывает особенно большие возможности по созданию разнообразных ИИС, поскольку в таких приборах обеспечивается единый обмен информацией. В большинстве случаев в одном микропроцессоре одновременно удается совместить функции программного управления прибором и интерфейсные функции.
Лекция 3 |
3.1. Структура микроконтроллеров. Особенности и выполняемые функции |
Микроконтроллер – вычислительно-управляющее устройство, предназначенное для выполнения функций контроля и управления периферийным оборудованием.
Уклон в сторону управления накладывает отпечаток на особенность архитектуры микроконтроллеров. Основной из этих особенностей является то, что наряду с процессорным ядром микроконтроллеры имеют в своём составе подсистему ввода-вывода и подсистему памяти. В последнем случае принято говорить об однокристальных микро-ЭВМ.
Рассмотрим особенности организации каждой из подсистем микроконтроллеров.
Процессорное ядро
Современные микроконтроллеры могут быть построены как по Гарвардской (например, MCS-51 Intel), так и по Фон Неймановской архитектуре (например, MCS-96 Intel и 80C166 Siemens). Все они имеют внешнюю системную магистраль для обмена данными с внешней памятью и дополнительными периферийными устройствами. Классические семейства микроконтроллеров (MCS-51) имеют, как правило, мультиплексные шины адреса/данных, что было обусловлено необходимостью минимизировать размер микросхемы. Однако современные быстродействующие микроконтроллеры используют уже демультиплексную шину, что ускоряет работу системы. Некоторые модели микроконтроллеров имеют возможность работать либо мультиплексной, либо с демультиплексной шиной, в зависимости от требуемой конфигурации системы. В случае демультиплексной шины контроллер быстрее обменивается данными по магистрали. При работе с мультиплексной шиной, освободившиеся выводы используются как порты ввода-вывода (например, MCS251 Intel и 80C166 Siemens).
Практически все микроконтроллеры выполняют только операции с фиксированной точкой. Существуют 8-разрядные (например, MCS-51 Intel и MC6805 Motorola), 16-разрядные (например, MCS-96 Intel, 80C166 Siemens и MC6816 Motorola), 32-разрядные (например, MC683 Motorola и MPC500 PowerPc) микроконтроллеры. Системы команд микроконтроллеров поддерживает, как правило, широкий набор методов адресации в т.ч. битовую адресацию.
Подсистема памяти.
Существуют микроконтроллеры с аккумуляторной (MCS-51) и регистровой (MCS-96) организацией. Количество регистров и их разрядность зависит от конкретной модели. Зачастую микроконтроллеры имеют несколько банков регистров (MCS-48, MCS-51, 80C166).
Память данных определенного объема присутствует на простом микроконтроллере практически всегда. Она обменивается данными с процессорным ядром по внутренней магистрали микроконтроллера, которая может быть организована иначе, чем внешняя. Поэтому обмен данными с внутренней памятью данных, как правило, осуществляется быстрее, чем с внешней.
Варианты реализации внутренней памяти программ могут быть различными:
1. Она может отсутствовать. В этом случае микроконтроллер выполняет программу, считывая команды из внешней памяти программ через системную магистраль.
2. Она может быть выполнена в виде масочного постоянного запоминающего устройства (ПЗУ). В этом случае микроконтроллер не нуждается во внешней памяти программ. Однако в этом случае программа во внутреннюю память записывается однократно на этапе изготовления кристалла и не может быть изменена в дальнейшем. Как правило, программа, записанная во внутреннюю память, выполняется быстрее, чем из внешней памяти.
3. Она может быть выполнена в виде однократно программируемого ПЗУ (ППЗУ). В этом случае пользователь сам может записать программу во внутреннюю память, но лишь однажды. Для записи программы, как правило, необходим специальный программатор. Однако существуют микроконтроллеры, способные программировать сами себя (например, микроконтроллер MCS-96, в котором программатор реализован внутри кристалла).
4. Она может быть выполнена в виде ППЗУ с ультрафиолетовым (УФ) стиранием. В этом случае память программ может быть многократно перепрограммирована с помощью программатора. Перед очередным программированием она должна быть очищена с помощью УФ излучения.
5. Она может быть выполнена в виде Flash-памяти. В этом случае память программ может быть многократно перепрограммирована в процессе работы системы.
6. Она может быть реализована в виде оперативного запоминающего устройства (ОЗУ). В этом случае для загрузки программы после включения питания используется так называемый Boot Strep загрузчик. Это механизм, позволяющий после включения питания загрузить начальную программу функционирования по последовательному каналу связи, либо по системной магистрали.