

9.1 Интеллектуальные средства измерения магнитных параметров материалов
Отличительными чертами рассматриваемой области измерений являются многообразие магнитных параметров, режимов намагничивания и необходимость производить обработку полученных при измерениях данных, поскольку большинство параметров определяется путем косвенных измерений. При малом уровне автоматизации требуются большая затрата времени на испытания магнитных материалов, а также высокая квалификация экспериментатора. В свете современных успехов в области вычислительной техники и микроэлектроники автоматические измерения магнитных параметров материалов могут быть выполнены существующим стандартным набором технических решений на основе типовых аппаратных структур. Периодический в большинстве случаев процесс перемагничивания говорит о сравнительно ограниченном количестве измерительной информации, проходящей по измерительным каналам. Это позволяет производить аналого-цифровое преобразование измеряемых величин с произвольно устанавливаемой скоростью, не зависящей от частоты перемагничивания. Здесь реализуется общая идея стробоскопического метода измерений.
Интеллектуальные автоматизированные универсальные средства измерений могут работать следующим образом. Выходные сигналы первичных преобразователей магнитных величин поступают на устройства выборки-хранения с временем выборки до долей микросекунды, т. е. с полосой пропускания до единиц мегагерц и более. В течение времени хранения от десятков микросекунд до единиц миллисекунд происходит аналого-цифровое преобразование выходных сигналов посредством точных аналого-цифровых преобразователей (АЦП) сравнительно низкого быстродействия. Полученные таким образом цифровые данные поступают в вычислительное устройство — микропроцессор или однокристальную ЭВМ для накопления и обработки. Предварительно эти данные (при недостаточном быстродействии микропроцессора) могут быть накоплены в быстродействующей буферной памяти. Затем происходит необходимая обработка цифровых данных для получения желаемого параметра или характеристики. Выходной сигнал первичного преобразователя может быть пропорционален измеряемой магнитной величине или ее производной и даже может быть связан с ней какой-либо другой известной функцией. Это несущественно, так как необходимое выделение магнитной величины путем, например, интегрирования или другой операции осуществляется легко не аппаратным, а программным путем без потери точности в цифровом виде. После окончания процедуры вычислений результаты выдаются в желаемом виде на любом стандартном периферийном устройстве: графопостроителе, дисплее, цифро-печатающем устройстве, перфораторе и т. п. В случае включения автоматизированного средства измерений в обратную связь управления технологическим процессом производства магнитного материала, результаты измерений должны соответствующим образом оперативно корректировать этот процесс с целью достижения наилучших качественных показателей.
Рассмотрим в качестве примера автоматическое устройство для измерения координат семейства магнитных петель и определения по ним всех производных характеристик — основных кривых намагничивания, различных видов магнитной проницаемости, удельных потерь, характеристик по первым гармоникам и т. п. в диапазоне частот от нуля (постоянный ток) до десятков килогерц.
Прежде всего остановимся на некоторых существенных вопросах методики проведения измерений, формы представления результатов измерений и алгоритмах обработки этих результатов.
Выше было указано влияние на магнитные петли режима намагничивания, т. е. режима изменения во времени магнитной индукции и напряженности, который важно знать в качестве дополнительной информации, как правило, не содержащейся в результатах измерений координат петель. Есть, однако, способ задания петли, позволяющий получать эту информацию. Достаточно обеспечить параметрическое задание петли, когда в зависимости от времени или какого-либо другого параметра задаются кривые индукции и напряженности. В случае цифрового представления петли в виде совокупности ее пар координат указанные зависимости представляют в моменты времени, которые делят период намагничивания на равные части.
Обработка результатов измерений координат магнитных петель возможна лишь при их представлении в виде аналитической аппроксимации. Аппроксимация в параметрическом виде имеет очевидные удобства, связанные с однозначностью кривых магнитной индукции и напряженности, в то время как сама петля в декартовых координатах всегда неоднозначна, а в полярных может быть неоднозначна. Искомое аналитическое приближение должно удовлетворять следующим требованиям. Во-первых, оно должно быть «сглаживающим», поскольку результаты измерений содержат погрешности средств измерений. Во-вторых, оно должно быть достаточно простым и удобным для вычислений. Наконец, в-третьих, это приближение должно быть наглядным и по возможности иметь физический смысл. Наибольшее распространение в такого рода задачах нашло приближение на основе метода наименьших квадратов, когда аппроксимирующая функция выбрана так, чтобы минимизировать сумму квадратов отклонения от ее экспериментальных точек. В рамках метода наименьших квадратов аппроксимация ортогональными многочленами или тригонометрическими полиномами имеет то преимущество, что улучшение аппроксимации путем добавления последующих членов не изменяет ранее вычисленных коэффициентов при предыдущих членах. Выбор должен быть сделан в пользу тригонометрических полиномов, поскольку они удовлетворяют поставленным выше требованиям, а физический смысл аппроксимации при их использовании заключается в том, что коэффициенты полиномов суть амплитуды гармонических составляющих спектров магнитной индукции и напряженности.
В соответствии с теоремой Котельникова минимально необходимое число пар координат на одну петлю должно вдвое превышать максимальный номер гармоники в разложении в ряд Фурье кривых магнитной индукции и напряженности, амплитуда которых еще соизмерима с погрешностью измерения. Обычно число таких гармоник не превышает 15—30, и, следовательно, число п необходимых пар координат на каждую петлю не более 30—60. Функциональная схема рассматриваемого устройства приведена на рисунок 1. Оно работает следующим образом. По цифровым сигналам управления с выхода микропроцессора МП цифро-аналоговый преобразователь ЦАП формирует аналоговый сигнал заданной формы и частоты, подаваемый на вход источника намагничивающего тока ИНТ, поддерживающего заданный режим намагничивания образца О. Выходные сигналы первичных преобразователей ПП магнитных параметров: ЭДС индукции, холловской ЭДС, намагничивающего тока и т. п. поступают на вход устройства выборки-хранения УВХ, стробируемые микропроцессором. В моменты появления стробимпульсов устройства выборки-хранения запоминают в аналоговом виде входной сигнал на время, достаточное для преобразования его аналого-цифровыми преобразователями АЦП в цифровую форму. Эти цифровые сигналы запоминаются в буферной памяти процессора. После получения таким образом п пар результатов в каналах измерения индукции и напряженности происходит дискретное увеличение амплитуды намагни-
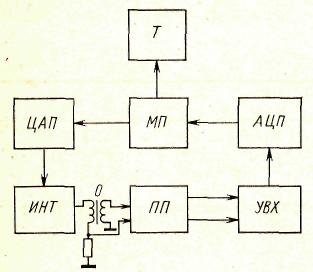
Рисунок 1 - Функциональная схема интеллектуального средства измерения магнитных петель
индукций от амплитуды напряженности. Магнитные измерения, традиционно считающиеся сравнительно сложными, являются подходящей областью для широкого внедрения автоматизированных средств измерений на основе современной электроники и вычислительной техники.
Успешно используется метод компарирования при создании I интеллектуальных магнитоизмерительных систем (МИС) и комплексов, применяемых для измерения параметров неоднородных магнитных полей, а также для исследования температурных характеристик и стабильности параметров сложных магнитных систем. При использовании метода разновременного косвенного сравнения в качестве КП лучше всего применять преобразователи Холла, которые отличаются малыми габаритами, широким рабочим диапазоном температур, высокой чувствительностью и относительно хорошей кратковременной стабильностью параметров . В качестве меры магнитной индукции для воспроизведения магнитного поля с индукцией выше 0,01 Тл наиболее пригодным является электромагнит броневого типа, индукция в рабочем зазоре которого контролируется автоматическим тесламетром ЯМР.
В зависимости от задачи исследования КП может быть одно-, двух- или трехкомпонентным, а также перемещаться по определенной программе по одной или нескольким координатам.
Успешно используется метод компарирования при создании I интеллектуальных магнитоизмерительных систем (МИС) и комплексов, применяемых для измерения параметров неоднородных магнитных полей, а также для исследования температурных характеристик и стабильности параметров сложных магнитных систем. При использовании метода разновременного косвенного сравнения в качестве КП лучше всего применять преобразователи Холла, которые отличаются малыми габаритами, широким рабочим диапазоном температур, высокой чувствительностью и относительно хорошей кратковременной стабильностью параметров . В качестве меры магнитной индукции для воспроизведения магнитного поля с индукцией выше 0,01 Тл наиболее пригодным является электромагнит броневого типа, индукция в рабочем зазоре которого контролируется автоматическим тесламетром ЯМР.
В зависимости от задачи исследования КП может быть одно-, двух- или трехкомпонентным, а также перемещаться по определенной программе по Применяемая в МИС микро-ЭВМ используется не Только как вычислитель, но и для управления работой составляющих МИС, например координатного устройства.
На рисунке 2 показана структурная схема МИС для исследования топографии магнитного поля, температурных характеристик и стабильности фокусирующих систем с осесимметричным магнитным полем. В качестве КП используется преобразователь Холла (ПХ), который перемещается шаговым двигателем ШД, управляемым ЭВМ. Информация о значении индукции в отдельных точках рабочего объема исследуемой системы, соответствующих каждому
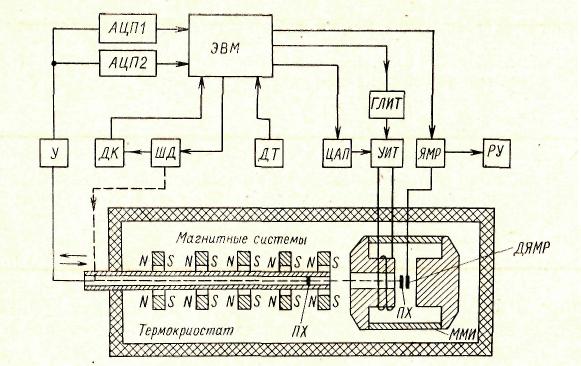
Рисунок 2 Структурная схема МИС для исследования топографии магнитного поля
шагу ПХ, в виде напряжения с ПХ через усилитель У подается на входы преобразователей АЦП1 и АЦП2, код с которых поступает в ЭВМ. Преобразователь АЦП1 — быстродействующий, но С малым числом разрядов, а АЦП2 — более точный, но с меньшим быстродействием. Для увеличения быстродействия МИС предусмотрены три скорости перемещения ПХ. Между контролируемыми участками скорость определяется тактовой частотой шагоодной или нескольким координатам чик тесламетра ЯМР (ДЯМР). После этого поочередно код из запоминающего устройства через преобразователь ЦАП подается на управляемый источник тока УИТ, питающий обмотку меры ММИ. При этом с помощью ЭВМ сравнивается выходное напряжение ПХ с напряжением, зафиксированным в запоминающем устройстве при нахождении ПХ в заданной точке исследуемой магнитной системы.
Точная настройка магнитной индукции в зазоре меры ММИ производится генератором линейно изменяющегося тока ГЛИТ, который управляется от ЭВМ. Ток генератора ГЛИТ, питающего дополнительную обмотку меры ММИ, фиксируется при равенстве указанных напряжений, и включается тесламетр 'ЯМР, показания которого подаются в ЭВМ или прямо записываются .регистрирующим устройством РУ. При этом в ЭВМ подаются также результаты измерения температуры ПХ при его нахождении в мере ММИ, которые используются для коррекции температурных погрешностей ПХ.
При определении температурных характеристик магнитных систем с постоянными магнитами исследуемая система, мера ММИ с датчиком ЯМР помещаются в термокриостат. В зависимости от применяемых ПХ и датчиков ЯМР рабочий диапазон МИС составляет 4,2—500 К.
Погрешность измерения магнитной индукции с помощью МИС в зависимости от неоднородности исследуемого поля составляет 0,01—0,2 %. Результаты измерений параметров магнитного поля выводятся на дисплей, графопостроитель и цифропечать.
В связи с трудностью создания меры магнитной индукции переменного магнитного поля при использовании метода компарирования для измерения в качестве образцовых мер применяются меры магнитной индукции постоянного поля, а в качестве КЛ — магниторезистор или два каскадно включенных преобразователя Холла .
Такие КП имеют близкие к квадратичным функции преобразования, что позволяет сравнивать действующее значение магнитной индукции переменного поля с индукцией постоянного поля.
При использовании гальваномагнитных КП можно производить компарирование магнитной индукции переменных и постоянных полей только в относительно узком диапазоне (0,05—0,1 Тл), ограниченном снизу малой чувствительностью КП, а сверху — увеличением составляющей погрешности, обусловленной отклонением реальной функции преобразования КП от квадратичной, которое превышает 1%. Увеличить диапазон измерений можно, если в качестве КП применить индукционный преобразователь, который поочередно помещается в переменное и постоянное магнитные поля; при этом в постоянном поле он приводится во вращательное или колебательное движение с частотой, равной частоте переменного поля. Этот метод целесообразно применять, когда форма кривой измеряемой магнитной индукции близка к синусоидальной.
Точные измерения индукции переменных магнитных полей в широком частотном диапазоне можно осуществить с помощью магнитооптических компараторов одновременного сравнения, основанных на эффекте Фарадея . При частоте переменного магнитного поля от единиц герц до десятков килогерц погрешность измерения магнитной индукции не превышает 0,2— 0,3%.