

МІНІСТЕРСТВО ОСВІТИ І НАУКИ, МОЛОДІ ТА СПОРТУ УКРАЇНИ
ОДЕСЬКА ДЕРЖАВНА АКАДЕМІЯ ТЕХНІЧНОГО РЕГУЛЮВАННЯ ТА ЯКОСТІ
Інтелектуальні засоби вимірювань
КОНСПЕКТ ЛЕКЦІЙ
для підготовки магістрів
з спеціальності
8.051001 – Метрологія та інформаційно-вимірювальні технології
6.051002 – Метрологія, стандартизація та сертифікація
Одеса - 2012
Укладач: Ваганов О.І.
Розглянуто та схвалено на засіданні кафедри нановимірювань та вимірювальної техніки
Протокол №___від_________2012р.
Завідувач кафедри ___________ О.М. Величко
Лекція 1
Особенность интеллектуальной измерительной техники. Перспективы развития средств измерительной техники.
Цифровые измерительные устройства являются одним из наиболее совершенных средств измерений. В современных цифровых измерительных устройствах основным узлом является микропроцессор. Применение микропроцессоров в измерительных приборах позволяет резко повысить точность приборов, значительно расширить их возможности, повысить надежность, быстродействие, решить задачи, которые ранее вообще не решались.
Конкретное рассмотрение функций микропроцессорных систем в измерительных приборах показывает, что с помощью этих систем достигаются многофункциональность приборов, упрощение управления процессом измерения, автоматизация регулировок, самокалибровка и автоматическая поверка, улучшения метрологических характеристик прибора, выполнение вычислительных процедур, статическая обработка результатов наблюдений, определение и перевод в линейную форму функций измеряемой физической величины, создание программируемых, полностью автоматизированных приборов. Появился новый класс «интеллектуальных» приборов, называемых также «думающими» или «разумными». Микропроцессор стал основной частью собственно прибора, что привело к изменению конструкции и схемных решений, компоновки, управлению, включению обработки данных в измерительную процедуру (выполняемую без участия экспериментатора). Внедрение микропроцессоров открыло возможность построения многофункциональных приборов с гибкими программами работы, сделало приборы более экономичными, облегчило решение задачи выхода на стандартную интерфейсную шину и управления интерфейсом. Все это упростило эксплуатацию приборов, резко повысило производительность труда их пользователей.
Наибольшее распространение получили интеллектуальные приборы для измерения электрических величин - напряжения, силы тока и сопротивления, а также для измерения временных параметров сигналов – частоты, периода, длительности импульсов и интервалов времени. В последнее время интеллектуальные приборы получают широкое применение для измерения неэлектрических величин, например давление, температуры, основанные на использование приборов для измерения электрических величин в сочетании с первичными измерительными преобразователями. Интеллектуальные приборы являются единственным видом измерительных устройств, обеспечивающих непосредственную связь и передачу измерительной информации от объекта измерений в микро – ЭВМ или в компьютер при автоматизации производственных объектов и научных исследований.
В последнее время стали широко применяться в интеллектуальных приборах микроконтроллеры, что стало гораздо проще решать задачи измерения, управления и регулирования, поскольку в одной компактной микросхеме сразу центральный процессор, память программ, память данных, таймер и порты ввода/вывода - и притом по доступной цене.
Без интеллектуальных измерительных приборов невозможна сейчас служба сервиса и ремонта сложной бытовой и промышленной аппаратуры, номенклатура которой в наши дни резко расширилась – достаточно отметить появление в таких сложных бытовых устройств, как жидкокристаллические и плазменные панели и телевизоры, цифровые видеокамеры и фотоаппараты, цифровые МР3 и МР4 плееры и рекордеры, холодильники и стиральные машины с микропроцессорным управлением и т.д. Их ремонт , отладка и сервисное обслуживание во время эксплуатации невозможны без применения сомой современной измерительной интеллектуальной техники изготовленной по современной технологии.
Лаборатории служб сервиса и ремонта уже интенсивно переоснащаются
современными зарубежными измерительными приборами. Стареющие лаборатории вузов и научных организаций также требуют оснащения новой измерительной техники. Начала расти заинтересованность государства в научных разработках, без которых невозможно не только развитие промышленного и оборонного комплекса, но и просто выпуск современных доброкачественных бытовых приборов и устройств.
В последние годы на украинский рынок стали поступать новейшие зарубежные измерительные приборы – как действительно уникальные (например, цифровые сверхскоростные осциллографы с полосой пропускания частот до 100 ГГц ), так и дешевые приборы, называемые бюджетными. В результате выбор измерительных приборов сильно усложнился и многие организации, специалисты испытывают трудности в их подборе для проведения исследований, наладки и тестирования всевозможных технических устройств. Новое поколение молодых специалистов порою не знакомо с современной интеллектуальной измерительной техникой, например с цифровыми осциллографами и виртуальными измерительными лаборатории. Поэтому цель и задача предмета, ознакомить студентов с современными технологиями в области измерительной техники, формирование профессиональных знаний в области современной технологии. Только грамотное их применение позволяет решать сложные вопросы измерений в радиоэлектронике с минимальными затратами на приобретение измерительных приборов.
В конспекте лекций значительное внимание уделено новейшей элементной базе измерительных приборов. Приведены и описаны самые массовые виды электро - и радиоизмерений : измерения сопротивления, емкости и индуктивности пассивных компонентов, добротности и тангенса угла потерь. Подробно описаны мультиметры – приборы для измерения этих параметров , в том числе подключаемые к компьютеру через порты RS-232 и USB. Описаны измерительные генераторы, выпускаемые зарубежной промышленностью, классические аналоговые осциллографы, новейшие интеллектуальные цифровые и стробоскопические стационарные осциллографы, настольные не дорогие бюджетные осциллографы, а так же мощные Hi – End осциллографы с полосой исследования частот до 50 – 100 ГГц., описаны осциллографы нового поколения портативных ( миниатюрных и сверхминиатюрных ). Они появились совсем недавно и быстро стали применяться на практике.
В конспекте лекций приведены новейшие интеллектуальные средства измерения – виртуальные РС – осциллографы и лаборатории, в которых отображение результатов измерений, переключение режимов работы, установка пределов измерений и обработка результатов возложены на персональный компьютер (ПК ). Это резко упрощает конструкцию таких приборов, позволяет привлекать для повышения эффективности обработки результатов вычислений и их запоминания такие необычайно мощные средства, как персональные компьютеры с их мощными и высокоскоростными микропроцессорами. Копьютеризированные ( виртуальные ) лаборатории это новый этап современной интеллектуальной техники измерений. Задача предмета показать, что данные лаборатории не только по карману крупным научным лабораториям, но есть общедоступные виртуальные лаборатории с мощными средствами обработки вполне реальных сигналов.
В конспекте приведены измерения неэлектрических величин электрическими методами. Описаны новые типы преобразователей, таких как новых магнитострикционных, тензометричных и пьезоэлектричных.
В конспекте лекций приведено метрологическое обеспечение интеллектуальных средств измерений
Учебное пособие представлено виде конспекта лекций. Такая форма представления материала имеет определенные преимущества :
- объем каждой лекции рассчитан в среднем на академических часа и
может сокращаться при ограничении времени, отводимого на изучение
материала ;
- количество лекций рассчитано на изучение дисциплины в течении семестра
( 12 недель) ;
Лекции тематически объединены в пять разделов. Они содержат тщательно подобранные иллюстрации , которые можно использовать в качестве учебного пособия.
1.2. ИНТЕЛЛЕКТУАЛЬНЫЕ ДАТЧИКИ (smart transducer, smart transmitter, smart sensor, intelligent transducer) - датчик со встроенным микропроцессором, допускающий двухсторонний обмен информации с ведущим компьютером. Благодаря применению микропроцессора облегчается процесс изменения пределов преобразования - конфигурирование, производится обработка информации (усреднение результатов, извлечение квадратного корня и т.д.), упрощается линеаризация сенсоров, повышается точность преобразования как за счет снижения погрешности линейности, так и за счет коррекции дополнительных погрешностей, прежде всего - температурных. В Д.и. осуществляется диагностика, что существенно повышает надежность систем на их основе. Благодаря передаче информации от ведущего компьютера к Д.и., его конфигурирование и диагностика может осуществляться дистанционно, что особенно важно при измерениях в условиях, опасных для здоровья человека.
Д.и. возникли в конце восьмидесятых годов XX века. Их развитие является отражением общей тенденции децентрализации, когда ведущий процессор системы освобождается от решения многих задач, выполняемых в периферийных устройствах (в том числе - в Д.и.). Стимулом к децентрализации является повышение надежности и точности, а также упрощение проектирования, изготовления и эксплуатации различных информационно-измерительных систем.
Распространены Д.и., способные выдавать не только цифровой, но и аналоговый сигнал измерительной информации (обычно постоянный ток в диапазоне 4-20 мА). Соответствующая структурная схема показана на рис. 1.

Измеряемая неэлектрическая величина X (температура, давление, расход жидкости и т.д.) преобразуется в напряжение с помощью чувствительного элемента Ч1, а затем в цифровую форму с помощью аналого-цифрового преобразователя АЦП1. Влияющие величины также преобразуются в цифровую форму с помощью дополнительных АЦП. На рис. 1 в качестве примера показана одна влияющая величина - температура Тд корпуса Д.и. и один дополнительный АЦП2. Результаты всех преобразований поступают в микропроцессор МП, где осуществляется их обработка - линеаризация, коррекция дополнительных погрешностей и т.д. Уточненная информация об измеряемой величине поступает на цифроаналоговый преобразователь ЦАП. На его выходе обычно образуется постоянный ток в диапазоне от 4 до 20 мА. Такие Д.и. называются двухпроводными, т.к. для связи с центральным устройством ЦУ используется кабель только с двумя жилами. При этом происходит экономия цветного металла и уменьшаются габариты линии связи. Ток питания в таких Д.и. является информативным параметром. Иногда для повышения точности используют выходные токи в диапазоне 0-20 мА. Однако поскольку электронный блок не может работать при нулевом токе питания, связь Д.и. с ЦУ приходится осуществлять с помощью кабеля с тремя жилами.
Для обмена информацией между ЦУ и Д.и. последний имеет цифровые вход и выход.
Эту функцию реализует устройство сопряжения УС. Его аппаратная реализация и соответствующее программное обеспечение зависят от выбранного типа протокола. Наибольшее распространение для Д.и. с начала девяностых годов приобрел протокол "ХАРТ" (HART - Highway Addressable Remote Transducer). Этот интерфейс был разработан фирмой Розмаунт (Rosemount) в 1986 году, а в 1989 году он стал открытым протоколом.
Основная особенность протокола ХАРТ по сравнению с большим числом других типов интерфейса - это возможность применения передовых решений, характерных для цифровых систем, при сохранении совместимости с существующими системами, в которых измерительная информация передается сигналом 4-20 мА. Цифровой сигнал от Д.и. к ЦУ передается по каналу связи с помощью модемов синусоидальным током амплитудой около 0,5 мА с частотой 1200 Гц для логической единицы и 2200 Гц для логического нуля. Цифровой сигнал от ЦУ к датчикам передается напряжением на тех же частотах с амплитудой порядка 0,5 В. Среднее значение переменного тока даже за сравнительно небольшой отрезок времени порядка 20 мс оказывается при этом пренебрежимо малым по сравнению с диапазоном изменения тока 16 мА. Поэтому возможно, например, одновременно передавать от Д.и. по одной и той же паре проводов аналоговым сигналом в диапазоне 4-20 мА информацию об одной физической величине, а цифровым сигналом передавать информацию о другой физической величине или различные команды. Эти команды могут передаваться не только от первичного ведущего компьютера (Primary Master), размещаемого в ЦУ, но и от вторичного (Secondary Master). Последнее устройство обычно является переносным. С его помощью можно вести контроль работы любого Д.и. и проводить его конфигурацию.
Передача цифровых сигналов сравнительно плавным синусоидальным сигналом позволяет облегчить вопросы искробезопасности систем, а также допускает сравнительно большое удаление Д.и. от ЦУ - до 1,5 км, а при использовании телефонной сети и определенных ограничениях - значительно дальше. Сети с протоколом ХАРТ могут передавать цифровую информацию по одной паре проводов при параллельном подключении до 15 Д.и. При этом, однако, не может быть использован аналоговый выход. Поэтому для новых разработок интерфейса аналоговый выход не предусматривается. В качестве примера бурно развивающегося чисто цифрового интерфейса можно назвать разновидность протокола "Полевая шина" ("Fiedbus").
Ограничения широкого применения протокола ХАРТ связаны с его относительно высокой стоимостью (как в аппаратной, так и в программной части) и недостаточно высоким для некоторых применений быстродействием. Поэтому при небольшом расстоянии между Д.и. и ЦУ (порядка 10 м) и при отсутствии особых требований к искробезопасности на практике продолжают использовать более простые интерфейсы типа RS232.
В таблице 3.1 указаны входные величины, непосредственно воздействующие на измерительные преобразователи (их иногда называют «естественными»); измеряемая величина может быть другой. Например, тензорезисторный ИП может быть применён для измерения давления жидкости или газа, которое в датчике {1К6} преобразуется в изменение размера базы (см. раздел 3.3) тензорезисторного ИП.
Название «параметрические» связано с тем, что выходными сигналами этих ИП являются параметры электрических цепей, точнее, изменения значений этих параметров под воздействием входных величин ИП. Для извлечения измерительной информации эти ИП принципиально требуют дополнительного источника энергии. Например, терморезисторный ИП может быть включён в мостовую измерительную цепь, к одной из диагоналей которой подключён источник напряжения.
Тензорезисторные ИП из фольги.
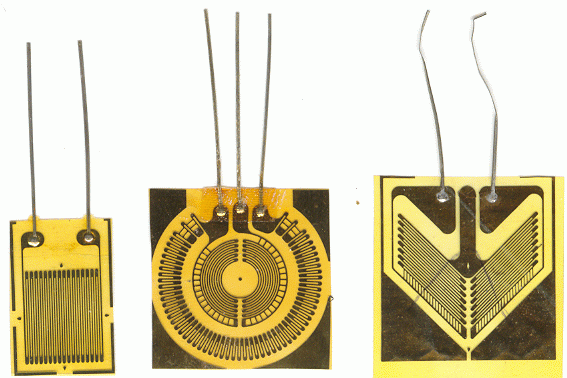
а) б) в)
Рис.1.
Решётка наклеивается на плёнку, а плёнка – на объект, претерпевающий деформацию. На рис. 1,а показан ИП, предназначенный для измерения линейных деформаций. Растягивающее или сжимающее усилие приложено вдоль петель решётки. Длина петель называется базой датчика l, её изменение Δl под действием приложенного усилия – деформацией, а εl = Δl/l - относительной деформацией. Расширения на концах решётки сделаны для припаивания выводов, а расширения в петлях – для уменьшения чувствительности к поперечным деформациям. На рис. 1,б показан ИП, наклеиваемый на мембрану для измерения давления, а на рис. 1,б – ИП, наклеиваемый на вал для измерения крутящего момента.
Другой способ изготовления тензорезисторных ИП – вакуумная возгонка металла или полупроводника и его конденсация на подложку. Такие ИП называют плёночными.
{3К4}
В простейшем случае это консольная балка. С одной стороны приклеены тензорезисторы, испытывающие деформацию растяжения (R1 и R3), а с другой – сжатия (R2 и R4).
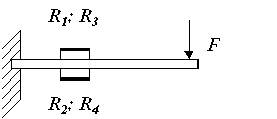 У
консольной балки один конец закреплён,
а к другому приложена изгибающая её
сила F.
У
консольной балки один конец закреплён,
а к другому приложена изгибающая её
сила F.
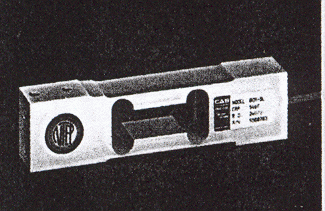
Рис. 1. Тензодатчик, применяемый в весах, рассчитанных на номинальную нагрузку 5; 10; 15; 20; 30; 50; 75; 100 кгс. РКП = 2 мВ/В.
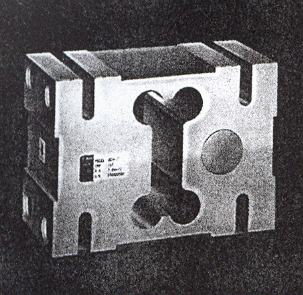
Рис. 2. Тензодатчик, применяемый в весах, рассчитанных на номинальную нагрузку 1; 1,5; 2 тс. РКП = 2 мВ/В.
Примечание. В технической документации по весоизмерительной технике часто используются внесистемные единицы измерения силы: «килограмм-сила» и «тонна-сила»; 1 кгс = 9,80665 Н.
{3К6}
Примером может служить модель AD7730 фирмы Analog Devices (рис. 1). Мост подключается к микросхеме шестью проводами:
двумя проводами на мост подаётся напряжение питания от того же источника + 5 В, который служит напряжением питания для аналоговой части микросхемы и подаётся на вывод AVDD; эти провода названы «силовыми» (+ FORCE и – FORCE);
двумя проводами напряжение с диагонали питания моста подаётся на микросхему и оно в ней используется, как опорное для АЦП (выводы + VREF и – VREF); эти провода названы «чувствительными», «воспринимающими» (+ SENSE и – SENSE);
двумя проводами напряжение с выходной диагонали моста подаётся на вход микросхемы (выводы +AIN и – AIN) и внутри микросхемы поступает на усилитель с программируемым коэффициентом усиления и далее на АЦП.
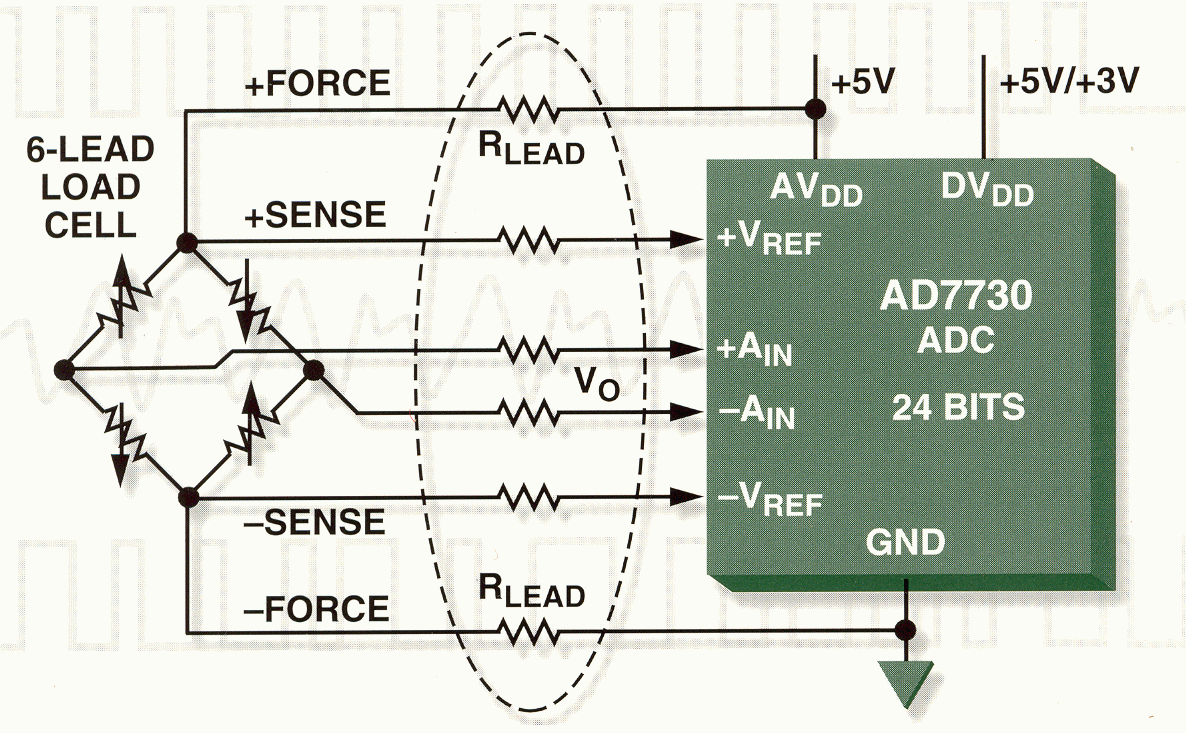
Рис. 1. Подключение моста с тензореситорными ИП к микросхеме AD7730
Примечания:
1. Число, код которого образуется на выходе любого АЦП пропорционально отношению входного напряжения к опорному. То, что в схеме рис. 1 одно и то же напряжение является и напряжением питания моста и опорным напряжением АЦП, обеспечивает независимость коэффициента преобразования деформации тензорезисторов в код от этого напряжения.
2. Почему две вершины моста соединены с микросхемой не одним, а двумя проводами (FORCE и SENSE), или, другими словами, почему вывод AVDD не соединён перемычкой с выводом + VREF, а вывод GND («земля») не соединён с – VREF? Получилось бы не шесть проводов, а четыре.
Дело в том, что в схеме рис. 1 по «силовым» проводам идёт сравнительно большой ток (поэтому они так и названы). Если, например, сопротивления тензорезисторов R = 200 Ом, то при напряжении 5 В этот ток будет 25 мА. Он создаёт падение напряжения на сопротивлениях этих проводов, которые обозначены RLEAD. В схеме рис. 1 оно не играет роли. А ток в проводах SENSE ничтожен, потому что он определяется большим входным для опорного напряжения сопротивлением АЦП. Если же перейти к четырёхпроводной схеме, то по проводам SENSE пойдёт большой ток и тогда напряжение питания моста и опорное напряжение АЦП перестанут быть одинаковыми.
Подстроечный резистор, изготовленный из фольги, показан на рис. 1.
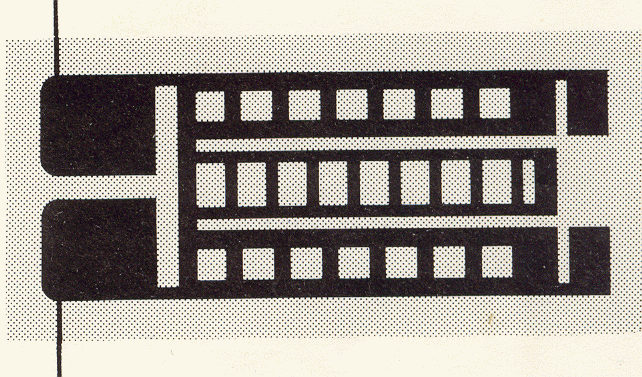
Рис. 1. Наклеиваемый подстроечный резистор из фольги.
Изменение сопротивления достигается разрушением отдельных перемычек.
На рис. 2 показан неравновесный мост, в котором R1 ÷ R4 – рабочие тензорезисторы, а R5 ÷ R12 – подстроечные. Резисторы R5 и R6 служат для установки нулевого значения выходного напряжения моста U при отсутствии нагрузки и при некоторой исходной температуре θ1, а R7 и R8 – для повторного выполнения этой операции при другой температуре θ2 в пределах рабочего температурного диапазона (желательно поближе к верхнему пределу). Резисторы R9 и R10 служат для установки номинального значения U при номинальной нагрузке и температуре θ1, а R11 и R12 – для повторного выполнения этой операции при температуре θ2.
Рис. 2. Неравновесный мост с рабочими тензорезисторами R1 ÷ R4 и подстроечными резисторами R5 ÷R12
Обратим внимание, что функция преобразования R(θ) линейна, но не проходит через начало координат. Поэтому, если, например, нам известно, что при θ = θ1 = 50 оС сопротивление R = R1 = 121,4 Ом, а мы хотим найти R = R2 при θ = θ2 = 100 оС, то эту задачу нельзя решать, составив простую пропорцию θ1 / θ2 = R1 / R2. Правильное решение состоит в том, что надо составить систему двух уравнений
R1 = R0(1 + αθ1);
R2 = R0(1 + αθ2),
из которой следует, что
![]() Ом.
Ом.
Название происходит от слов «термочувствительный резистор», что, конечно, мало оправдано, потому что металлические резисторы тоже чувствительны к температуре.
В качестве примеров на рис. 1 – 4 показаны некоторые из них.
На рис. 1 показан датчик, применяемый в приборах для измерения температуры помещений. Катушка с медной проволокой намотанной на каркас, находится в тонкостенной металлической трубке, а она заключена в полированный перфорированный экран для защиты от механических повреждений и лучистой теплоты.
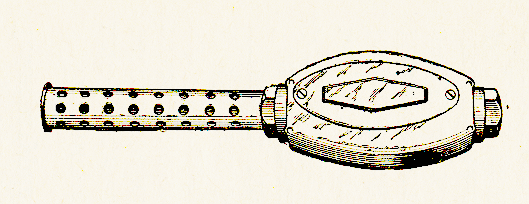
Рис.1. Внешний вид датчика с медным терморезистором
На рис. 2 показаны датчики с платиновыми ИП.
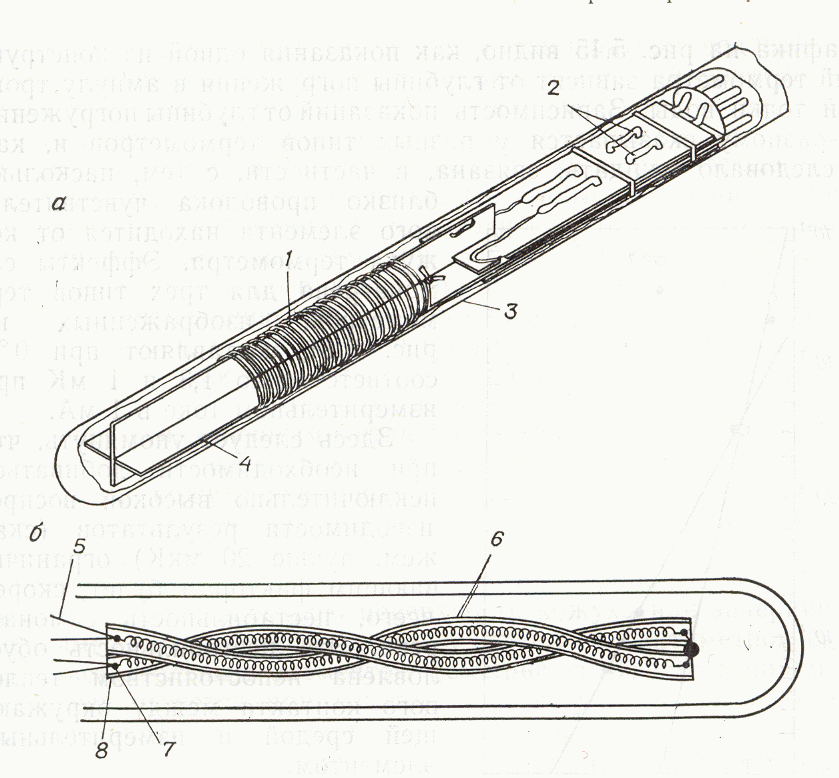
Рис. 2. Датчики с платиновыми ИП: с бифилярной намоткой на слюдяной крестовине (а); со спиралью в кварцевых трубочках (б).
1 – платиновая проволока; 2 – крепление проводов; 3 – стеклянный кожух; 4 – слюдяной каркас-изолятор; 5 – четыре платиновых вывода; 6 – кварцевая
трубка; 7 – сварное присоединение платиновых выводов; 8 – крепление платины к стеклу.
Полупроводниковый ИП, показанный на рис. 3, герметизирован, благодаря чему его можно применять в условиях любой влажности.
Миниатюрные полупроводниковые ИП (рис. 4) применяют для измерения температуры малых объектов и для измерения изменяющихся во времени температур (малая масса – малая тепловая инерционность). Терморезистор выполнен в виде шарика диаметром около 0,8 мм с выводами из тонкой платиновой проволоки, к концам которой приварены проводники из нихрома. Корпус сделан из стекла.
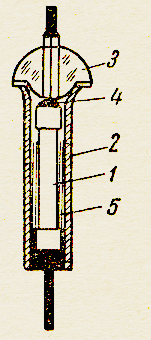
Рис. 3. Полупроводниковый ИП. 1 – полупроводниковый стержень; 2 – металлический корпус; 3 и 4 – стекло и олово для герметизации; 5 – металлическая фольга, в которую обёрнут стержень.
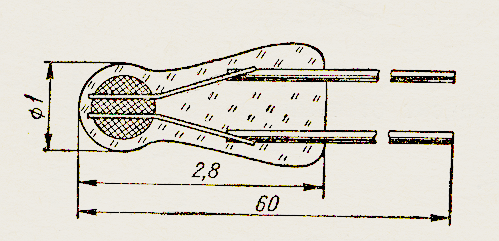
Рис. 4. Миниатюрный полупроводниковый
ИП бусинкового типа.
Микросхемы серии AD77хх, применение одной из которых в тензометрии было показано в {3К6}, могут применяться и для термометрии, как показано на рис.1. Здесь применён один внешний по отношению к микросхеме источник тока 400 мкА, к которому подключены последовательно включённые платиновый терморезистор Pt RTD (Resistance Temperature Detector) с R0 = 100 Ом и опорный резистор RREF = 6,25 кОм. Падение напряжения на опорном резисторе используется в качестве опорного напряжения (VREF = 400 мкА × 6,25 кОм = 2,5 В) для микросхемы, а падение напряжения на терморезисторе является входным, которое внутри микросхемы через мультиплексор MUX и усилитель PGA с программируемым коэффициентом усиления поступает на аналого-цифровой преобразователь ADC. Выходной последовательный код, несущий информацию об измеряемой температуре поступает на другую микросхему - микроконтроллер.
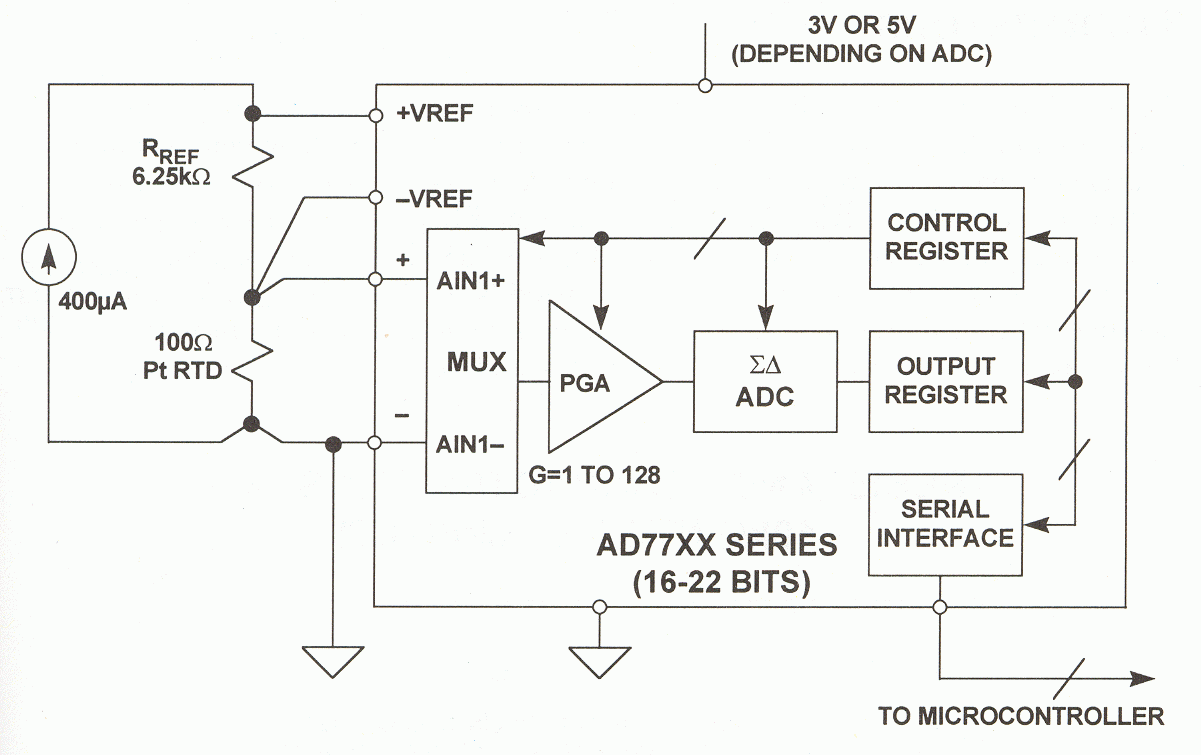
Рис.1. Применение микросхем серии AD77хх фирмы Analog Devices для измерения температуры посредством терморезисторов.
Следует отметить, что фирма Analog Devices создала также микросхемы с ещё более высоким уровнем интеграции: у них микроконтроллер входит в состав микросхемы. Для получения отсчёта к ним достаточно подключить цифровой индикатор. Фирма назвала их аналого-цифровыми микро преобразователями и обозначила ADuC (буква μ – микро заменена на u).
{3К15}
На рис. 1 показан такой мост. Терморезистор R1 соединён с прибором трёхпроводной линией связи. Резисторы R2 ÷ R5 вместе c R1 образуют мост, питаемый синусоидальным напряжением сетевой частоты. Мост уравновешен при
(R1 + R2,т)R4 = R3R5. (1)
где R2,т – текущее значение сопротивления переменного резистора R2, зависящее от положения движка.

Рис. 1. Мост с автоматическим уравновешиванием для измерения и регистрации температуры. Пунктир – механические связи.
Состояние равновесия автоматически поддерживается следящей системой, содержащей усилитель переменного напряжения, реверсивный асинхронный двигатель Д и понижающий редуктор Р. Эта система перемещает движок переменного резистора R2 так, чтобы выполнялось равенство (1): если температура θ, например, увеличивается, то R1 увеличивается, а R2,т на столько же уменьшается. Вместе с перемещением движка резистора R2 перемещается указатель вдоль шкалы, проградуированной в оС и перо, вычерчивающее кривую изменений температуры во времени на бумажной диаграммной ленте равномерно перематываемой с верхнего подающего рулона на нижний принимающий (привод перемещения ленты на рисунке не показан).
При изменении температуры нужное направление вращения двигателя в сторону выполнения (1), а не наоборот в сторону отхода от него, получается благодаря тому, что фаза напряжения, поступающего на вход усилителя, изменяется на 180о при увеличении и уменьшении R1 относительно значения, соответствующего (1).
Трёхпроводная линия связи терморезистора R1 при определённых условиях обеспечивает инвариантность показаний к изменениям сопротивлений проводов, вызванным изменением длины проводов или температуры помещения, в котором они находятся. Обозначим сопротивления проводов, идущих к R1 на рис. 1, r1, r2, r3 в порядке слева направо и запишем условие равновесия моста с учётом этих сопротивлений:
(R1 + r1 + R2,т) R4 = (R3 + r2)R5. (2)
При r1 = r2 и R4 = R5 (2) превращается в (1), т.е. r1 и r2 не влияют. Третий провод включён в диагональ питания моста и, следовательно, его сопротивление r3 принципиально не влияет на равновесие моста.
На рис. 1 показана конструкция датчика пьезоэлектрического акселерометра. [Акселерометр (от латинского accelero – ускоряю) – прибор для измерения ускорения.]

Рис. 1. Конструкция пьезоэлектрического акселерометра.
Все элементы датчика крепятся к металлическому основанию 1, на котором нарезана резьба для крепления на объекте. Преобразователь 2 состоит из двух параллельно включённых пьезоэлементов из кварца. Инерционная масса 3 из сплава высокой плотности создаёт силу, воздействующую на преобразователь. Напряжение с кварцевых пластин снимается с помощью латунной фольги 4, соединённой с центральной жилой кабеля 5. Датчик закрыт крышкой 6, навинченной на основание.
В данном случае можно составить такое же уравнение движения, как и для индукционного преобразователя:
![]() ,
,
но теперь сам пьезопреобразователь – это пружина с большой жёсткостью W, поэтому
Wy
>>
![]() ,
,
и, значит,
![]()
где y – перемещение массы m относительно вибрирующего объекта; F – сила, создающая деформацию пьезопреобразователя; x – перемещение объекта относительно неподвижной базы.
Таким образом, в данном случае сила F, а значит и напряжение, снимаемое с датчика, пропорциональны ускорению вибрирующего объекта.
Лекция 2
2.1 Общие вопросы применения микропроцессоров в измерительной технике
Функции, выполняемые микропроцессорами в приборах.
Общие сведения.
Для современного этапа развития техники характерно все более интенсивное и глубокое проникновение в ее различные отрасли микропроцессоров, радикально преобразующих свойства многих устройств и открывающих новые возможности их применения. По широте и эффективности применения микропроцессоров одно из первых мест занимает контрольно-измерительная техника.
Применение микропроцессоров в измерительной технике позволяет резко повысить точность приборов, значительно расширить их возможности, повысить надежность, быстродействие, решить задачи, которые ранее вообще не решались.
Конкретное рассмотрение функций микропроцессорных систем в измерительных приборах показывает, что с помощью этих систем достигаются:
многофункциональность приборов, упрощение управления процессом измерения;
автоматизация регулировок;
самокалибровка и автоматическая поверка;
улучшение метрологических характеристик прибора;
выполнение вычислительных процедур;
статистическая обработка результатов наблюдений;
определение и перевод в линейную форму функции измеряемой физической величины;
- создание программируемых, полностью автоматизированных приборов. Радикально изменилась идеология построения приборов. Микропроцессор стал основной частью собственно прибора, что привело:
к изменению конструкции и схемных решений;
компоновки,
управления;
включению обработки данных в измерительную процедуру (выполняемую без участия экспериментатора).
Внедрение микропроцессоров открыло возможность построения многофункциональных приборов с гибкими программами работы, сделало приборы более экономичными, облегчило решение задачи выхода на стандартную интерфейсную шину (канал общего пользования (КОП)) и управления интерфейсом. Все это упростило эксплуатацию приборов, резко повысило производительность труда их пользователей.
Рассмотрим более подробно основные возможности, особенности приборов, содержащих микропроцессорные системы, и выясним, в результате чего достигаются эти возможности.
Многофункциональность. Идея построения многофункциональных измерительных приборов, предназначенных для измерения нескольких параметров сигналов или характеристик объекта исследования, не нова. Она осуществляется уже более двух десятилетий. Но до применения микропроцессоров многофункциональные приборы представляли собой совокупность нескольких функциональных узлов, объединенных в одно конструктивное целое. При эксплуатации таких приборов переход от одной функции к другой производится с помощью коммутирующих устройств. В результате коммутации соединительных цепей пользователь составляет, "собирает" из отдельных узлов определенный прибор для измерения конкретного параметра сигнала или характеристики испытуемого объекта. Алгоритм работы средства измерений, заложенный при его разработке, в процессе эксплуатации сохраняется неизменным. Иначе говоря, традиционные многофункциональные приборы выполнены по схеме с жесткой логикой. Для нее характерно противоречие между многофункциональностью, числом возможных функций прибора, с одной стороны, и экономической, а также технической эффективностью — с другой. Проблема коммутации и управления никогда не теряла остроты при конструировании приборов, предназначенных для выполнения ряда функций, и далеко не всегда решалась успешно.
Микропроцессорная система, введенная в состав многофункционального средства измерения, радикально изменила его, преобразовала устройство с жесткой логикой работы в программно-управляемое устройство. Функциональные возможности такого устройства определяются выполняемой программой, и могут быть легко видоизменены путем перехода к другой программе, хранимой в ПЗУ. Поэтому программируемую логику работы подобных приборов иногда называют "хранимой". Она создает гибкость перестройки, позволяет наращивать функции при модернизации прибора без существенных изменений в его схеме. Применение программируемой логики, как правило, уменьшает стоимость прибора.
Повышение точности приборов. Напомним, что под точностью средства измерений понимают качество средства измерений, отражающее близость к нулю его погрешностей. При этом близость к нулю систематических погрешностей определяет правильность средства измерений, а близость к нулю случайных погрешностей — сходимость показаний средства измерений.
Погрешности средства измерений относятся к его метрологическим характеристикам. Улучшение метрологических характеристик, достигаемого в результате введения микропроцессорной системы в состав прибора заключается в автоматической компенсации (исключении) систематической погрешности:
а) в автоматической установке нуля перед началом измерений;
б) в автоматическом выполнении градуировочной операции (самокалибровка);
в) в выполнении самоконтроля;
г) в уменьшении влияния случайных погрешностей путем проведения многократных наблюдений (единичных измерений) с последующим усреднением их результатов
д) в выявлении и исключении грубых погрешностей;
е) в выведении на дисплей информации о числовых значениях погрешностей по ходу измерений.
Расширение измерительных возможностей приборов. Применение микропроцессоров позволяет существенно расширить возможности измерений широкого перечня параметров сигналов и характеристик устройств. Это связано, прежде всего, с использованием, казалось бы устаревших, видов измерений: косвенных и совокупных.
Известно, что косвенное измерение заключается в нахождении искомого значения физической величины по известной математической зависимости между этой величиной и физическими величинами, подвергаемыми прямым измерениям. Иначе говоря, искомое значение данной физической величины вычисляется по результатам прямых Измерений других физических величин. Если физическая величина z, значение которой нужно измерить, представляет собой функцию
Z=f(X1, X2,...,Xq),
где x1, х2,..., х,, — физические величины, подвергаемые прямым измерениям, и B1, В2, ..., Bq — результаты прямых измерений физических величин x1, х2,..., xq, то результат А косвенного измерения находят из выражения
A=f(B1,B2,...,Bq),
Из-за необходимости применения нескольких приборов, снятия ряда отсчетов и последующих вычислений косвенные измерения воспринимаются многими экспериментаторами как примитивные, несовременные. Даже при использовании микрокалькуляторов вычисления в некоторых случаях могут занимать значительное время, и, главное, они, требуя постоянного внимания и работы экспериментатора, не позволяют достичь высокой производительности.
Кроме того, не очень проста процедура оценки погрешностей косвенных измерений, а без этого никакое измерение не может быть признано достоверным.
Коренным образом меняется положение при включении в состав прибора микропроцессорной системы. По команде, получаемой с клавиатуры, она автоматически в соответствии с заданной программой выбирает режимы измерений, запоминает результаты прямых
измерений, проводит необходимые вычисления и выдает найденное значение измеряемой физической величины на дисплей. Хотя измерения по своей природе остаются косвенными, экспериментатор воспринимает их как прямые, поскольку, подключив прибор к объекту исследования, непосредственно получает результат измерения.
Примером может служить измерение цифровым вольтметром мощности P, рассеиваемой на нагрузочном резисторе усилителя низкой частоты. Измерения осуществляются согласно формуле
P=U2/R,
где U — падение напряжения на резисторе; R — сопротивление резистора. Цифровому вольтметру задается программа, согласно которой сначала измеряется сопротивление резистора и запоминается полученный результат, затем измеряется напряжение на резисторе, после чего вычисляется мощность.
В качестве других примеров можно привести измерение сопротивлений резисторов на основе формулы закона Ома R =U/I и измерение коэффициента усиления усилителя согласно определению K=Uвых/Uвх.
Приведенные примеры относятся к сравнительно простым математическим соотношениям. Однако на практике нередко возникает необходимость нахождения косвенным путем значений и таких физических величин, которые зависят от большого числа непосредственно измеряемых других физических величин. Применение микропроцессорных систем делает эти измерения простыми и удобными для пользователя, получающего прямые показания прибора и не ощущающего того, что фактически выполняются сложные косвенные измерения.
Еще более эффективны микропроцессорные системы при совокупных измерениях, т.е. производимых одновременно измерениях нескольких одноименных физических величин, при которых искомые значения величин находят решением системы уравнений, получаемых при прямых измерениях различных сочетаний этих величин.
Упрощение и облегчение управления прибором. На первый взгляд расширение функций, выполняемых программируемыми приборами, должно было бы привести к увеличению числа органов управления. Но в действительности это не так. Одним из критериев высокого уровня программного обеспечения измерительного прибора является степень сложности его передней панели.
Принято считать, что "разумный" прибор должен иметь простой набор органов управления. Для современных приборов, содержащих микропроцессоры, характерна кнопочная система управления, конструктивно оформляемая в виде клавиатур (выносной или на передней панели прибора), внешне напоминающей клавиатуру калькулятора.
Так, например, у одного из цифровых мультиметров, обладающего многими функциональными возможностями, управление изменением функций, диапазонов измерений и режимов работы (всего 44 сочетания) осуществляется с помощью клавиатуры, состоящей всего из 17 клавиш. Этого удалось достичь вследствие того, что каждая клавиша управляет аналоговыми схемами косвенным образом — через микропроцессор, а последний селектиру-ет различные сочетания сигналов, вводимых при нажатии клавиш.
Другим примером упрощения управления, сокращения числа ручек и кнопок может служить малогабаритный 7-разрядный цифровой частотомер, работающий в диапазоне 10Гц...1ГГц. На передней панели этого прибора имеются только два входных разъема (первый — для сигналов частотой 10...75 МГц, второй — для сигналов частотой 70 МГц...1 ГГц), кнопка включения прибора, ручка регулятора чувствительности и двухпозиционный кнопочный переключатель длительности временных ворот ("времени измерения"): 1 с и 1 мс.
Радикально уменьшает число органов управления автоматизация выбора пределов измерений, интервала дискретизации напряжения исследуемого сигнала и других режимов работы прибора. В некоторых приборах предусмотрены сигнализация о некорректных шагах экспериментатора и выдача на дисплей инструкций, указывающих, что должен предпринять экспериментатор, какова правильная последовательность действий.
Возможность получения математических функций измеренных значений. В зависимости от решаемой задачи экспериментатора могут интересовать не непосредственно получаемое при измерении значение физической величины, а его различные математические функции. Многие приборы, содержащие микропроцессорные системы, позволяют автоматически выполнять запрограммированные функциональные преобразования. Примерами таких преобразований могут служить:
1. Умножение найденного значения A на константу c. При этом показание прибора Ап=cА. Константа вводится по команде при нажатии клавиши.
2. Получение отклонений результата измерения A от номинального значения Aн: абсолютного A-Aн и относительного, выраженного в процентах по отношению к номинальному значению, т.е. 100(A-Aн)/Aн.
3. Смещение, предполагающее вычитание константы из результата измерения.
4. Вычисление отношений: деление на константу (например, при определении значения постоянного тока через резистор по измеренному вольтметром значению падения напряжения на этом резисторе), нахождение частного от деления одного результата измерения на другой результат измерения (например, при определении коэффициента усиления по результатам измерений напряжений на выходе и входе усилителя).
5. Представление результата измерения в логарифмических единицах. Например, затухание четырехполюсника, выраженное в децибелах: a=20lg(Uвх/Uвых).
6. Линеаризация зависимостей. Такая необходимость особенно часто встречается при электрических измерениях неэлектрических величин (например, температуры), когда напряжение электрического сигнала на выходе датчика представляет собой нелинейную функцию измеряемой физической величины на его входе. В таких ситуациях значения выходного напряжения датчика преобразуются с помощью АЦП в числа, которые обрабатываются микропроцессорной системой по заданной программе, и в итоге получается линейная связь между показаниями прибора и значениями физической величины на входе датчика.
В некоторых приборах предусмотрена возможность вычисления по желанию пользователя произвольных (разумеется, в определенных пределах) математических соотношений.
Получение статистических характеристик. Ряд вольтметров, в составе которых имеется микропроцессорная система, позволяет формировать оценки таких вероятностных характеристик анализируемой случайной переменной, как среднее значение, средняя мощность, среднеквадратическое значение, дисперсия, среднеквадратическое отклонение, а также коэффициент корреляции двух случайных переменных. Микропроцессорные приборы, специально предназначенные для измерения статистических характеристик сигналов, обладают более широкими возможностями.
Миниатюризация и экономичность аппаратуры. Резкое уменьшение числа компонентов в схеме прибора вследствие выполнения многих функций микропроцессорной системой, их относительно невысокая стоимость, значительное снижение потребляемой мощности позволяют строить малогабаритные и экономичные приборы.
Повышение надежности приборов. Оно обусловлено уменьшением числа элементов схем, осуществлением автодиагностики, применением узлов с некалиброванными характеристиками (например, усилителя в канале вертикального отклонения осциллографа), возможностью выполнения коррекции погрешностей, улучшающей метрологическую надежность.
Сокращение продолжительности разработки. Часто для получения новых свойств прибора, выполняемого на основе микропроцессорной системы, не требуется значительных изменений в схеме и тем более в конструкции прибора. Основное содержание разработки заключается в создании необходимого программного обеспечения. Учитывая, что для широко применяемых микропроцессоров, уже накоплена библиотека достаточно совершенных типовых прикладных программ (перемножения и деления двухбайтовых чисел, возведения числа в квадрат, извлечения корня квадратного и т.п.), во многих случаях разработка программного обеспечения прибора в значительной степени сводится к рациональному выбору имеющихся программ.
Организация измерительных систем. Прибор, содержащий микропроцессор, обычно снабжен (или может быть дополнен) интерфейсной картой, позволяющей подключать его к стандартной интерфейсной шине. Это дает возможность объединять определенную совокупность приборов в единую измерительную систему (измерительно-вычислительный комплекс).