

5.5. Исследование цифровой системы на устойчивость.
Как
известно, непрерывная система
устойчива, если все корни ее
характеристического уравнения лежат
в левой полуплоскости. При исследовании
дискретных систем вместо р используется
новая переменная z =![]() .
Конформное преобразование z =
отображает
левую полуплоскость плоскости р в
область, ограниченную окружностью
единичного радиуса на плоскости z, при
этом мнимая ось отражается в саму эту
окружность [1]. Следовательно, для того
чтобы системы была устойчива необходимо
и достаточно, чтобы корни
характеристического уравнения лежали
внутри единичной окружности.
.
Конформное преобразование z =
отображает
левую полуплоскость плоскости р в
область, ограниченную окружностью
единичного радиуса на плоскости z, при
этом мнимая ось отражается в саму эту
окружность [1]. Следовательно, для того
чтобы системы была устойчива необходимо
и достаточно, чтобы корни
характеристического уравнения лежали
внутри единичной окружности.
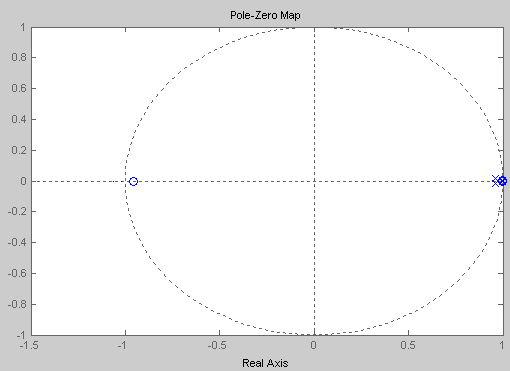
Рис. 23. Проверка устойчивости ЦСАУ
Как видно из рис. 23, все корни характеристического уравнения лежат внутри единичной окружности, следовательно, проектируемая цифровая система устойчива.
6. Выбор электронных компонентов
Рассматривая функциональную схему устройства (рис. 10), можно сделать вывод о количестве необходимых компонентов для реализации цифровой САУ.
Представим список необходимых компонентов:
1) Плата Freeduino;
2) Силовой модуль;
3) датчики (3шт);
5) ЖКИ - дисплей;
6) Радио модуль.
6.1. Плата.
Для проектируемой ЦСАУ рационально использовать плату Freeduino Through-Hole на базе микропроцессора ATmega168 т.к. она подходит к нашему т.з., простата в использовании, не большая цена.
Технические характеристики:
Микроконтроллер: ATmega168
Цифровые порты ввода/вывода: 14 портов (из них 6 с ШИМ-сигналом)
Аналоговые порты ввода: 6 портов
ППЗУ 16 K из них 2 К используются загрузчиком
ОЗУ (SRAM): 1 Кбайт
ПЗУ (EEPROM): 512 байт
Тактовая частота: 16 МГц
Интерфейс с ПК: USB
Питание от USB, либо от внешнего источника, выбор с помощью перемычки
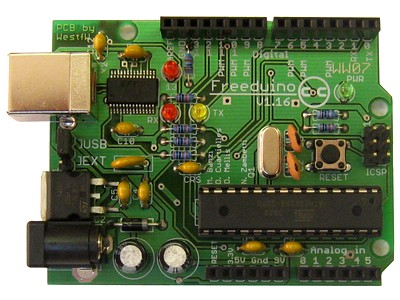
Рис. 24. Freeduino Through-Hole.
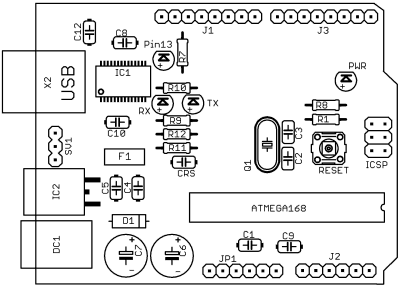
Рис. 25. Обозначение элементов
Резистор 10 кОм R1
Резистор 1 кОм R7, R8, R9, R10, R11, R12
Неполярный конденсатор 100 нФ C1, C4, C5, C8, C9, C10, C12, CRS
Неполярный конденсатор 24 пФ C2, C3
Полярный конденсатор 47 мкФ C6, C7
Диод D1
Предохранитель F1
Светодиод красный Pin13, RX
Светодиод желтый TX
Светодиод зеленый PWR
Кварцевый резонатор Q1
Кнопка RESET
Вилка штыревая 3x1 ICSP
Вилка штыревая 3x1 SV1
Гнездо 6x1 JP1, J2
Гнездо 8x1 J1, J3
Гнездо USB X2
Гнездо питания DC1
Микроконтроллер ATmega168
Панель для микроконтроллера ATMEGA168
Микросхема FT232RL IC1 (уже смонтирована)
Стабилизатор 7805D2T IC2 (уже смонтирован)
Перемычка (джампер) Для выбора источника питания на SV1
Разъем питания Для подключения внешнего питания