

2. Описание объекта управления

Рис.8 (вид с верху)
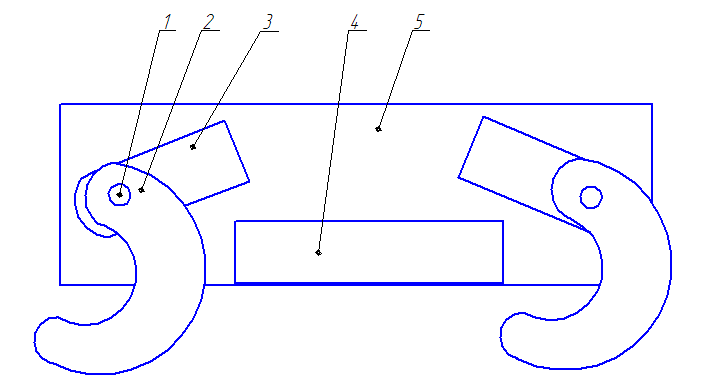
Рис.9 (вид сбоку)
Робот состоит из корпуса 5, на котором закреплены приводы 3, на выходном волу привода расположена втулка 1, на которой закреплена лапа 2. Питания робота осуществляется с помощью аккумулятора 4, длины L1 и L2 выбраны разные для того что бы лапы робота могли бы двигаться асинхронно не мешая друг другу.
Функциональная схема устройства

Рис.10 Функциональной схемы в виде блок-схемы
На функциональной схеме (рис.10) приняты следующие обозначения:
Pitanie – выключатель питания установки;
START – кнопка включения робота. При включённом состоянии осуществляется подача питания на приводы и датчики, начинается обработка данных с аналоговых входов микроконтроллера, ЖКИ переходит в режим отображения скорости перемещения робота.
STOP – кнопка выключения установки.
P – кнопка обеспечивающая реверс приводов.
D1 – Аналоговый датчик.
D2 – Цифровой датчик
D3 – цифровой датчик, регистрирующий угол поворота подвижного диска – инкрементальный энкодер.
М1,М2,М3,М4 – приводы постоянного тока.
LCD – жки дисплей.
Radio – радио модуль позволяющий дистанционно управлять роботом.
4. Структурная схема устройства
На рис.11 приведена структурная схема системы автоматического управления одним из приводов.

Рис. 11. Структурная схема управления приводом вертикального вращения, где
Wус (p) – передаточная функция усилителя;
Wдвигателя (p) – передаточная функция двигателя;
Wредуктора (p) - передаточная функция редуктора;
Wос (p) – передаточная функция обратной связи;
Wвозм возд(p) – передаточная функция возмущающего воздействия;
4.1. Выбор электродвигателя.
В качестве двигателя для реализации устройства был взят двигатель A_max 26 _26 mm, Precious Metal Brushes CLL, 4 Watt, _ approved из каталога фирмы Maxon.
Основные параметры двигателя приведены в таблице.
Наименование параметра |
Обозначение |
Значение |
Индуктивность якоря |
Lя |
0.0000937 Гн |
Момент инерции, приведённый к валу |
J |
58,4*10-6 Н∙м2 |
Номинальный ток якоря |
i я ном |
9.15 А |
Номинальное напряжение |
Uном |
24 В |
Количество оборотов |
N |
5780 об/мин |
Номинальный момент |
Мном |
0.354 Н∙м |
Сопротивление в цепи якоря |
rя |
0.113 Ом |
4.2. Определение передаточных функций.
Так как при фиксированном возбуждении двигатель имеет две степени свободы, то необходимо иметь для него два исходных дифференциальных уравнения. Первое уравнение может быть получено, если записать второй закон Кирхгофа для цепи якоря; второе же представляет собой закон равновесия моментов на валу двигателя .
Таким образом, работу привода можно описать следующими уравнениями:
![]()
(1)
В
этих уравнениях
![]() и
и
![]() – индуктивность и сопротивление цепи
якоря;
– индуктивность и сопротивление цепи
якоря;
![]() и
и
![]() ,
где
,
где
![]() и
и
![]() – коэффициенты пропорциональности, а
– коэффициенты пропорциональности, а
![]() – поток возбуждения;
– поток возбуждения;
![]() –
приведенный к оси двигателя суммарный
момент инерции,
–
приведенный к оси двигателя суммарный
момент инерции,
![]() - угловая скорость, М – момент нагрузки,
приведенный к валу двигателя/
- угловая скорость, М – момент нагрузки,
приведенный к валу двигателя/
![]()
(2)
![]() с-1
с-1
К![]() онстанты
Се
и Cm
найдём по следующим формулам:
онстанты
Се
и Cm
найдём по следующим формулам:
![]()
(3)
![]()
![]()
(4)
Запишем систему уравнений для пространства Лапласа: (5)
Выразим из второго уравнения системы (5) ток и подставим в первое:
![]()
(6)
Преобразуем выражение к виду:
![]()
(7)
Отсюда находим передаточную функцию:

(8)
и передаточную функцию по возмущающему воздействию:
![]()
(9)
Передаточная функция обратной связи:
Wос (p) = 1. (10)
Передаточная функция редуктора
Wредуктора (p) = 1/500. (11)