

Обозначим
 (8.42)
(8.42)
 (8.43)
(8.43)
тогда
 (8.44)
(8.44)
где о.з – скорость идеального холостого хода АД на линеаризованной механической характеристике (фиктивная величина),
з.с – модуль жесткости линеаризованной механической характеристики.
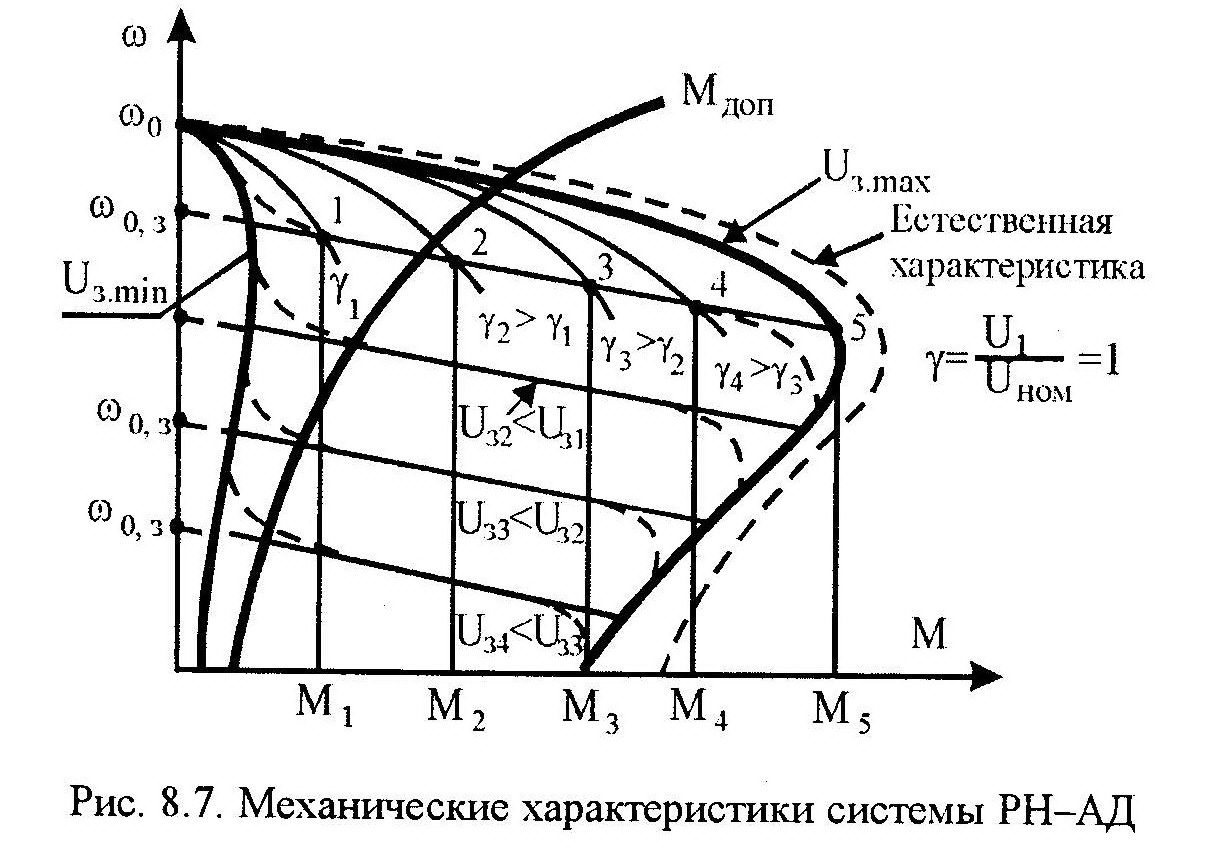
При рассмотренных условиях линеаризованная механическая характеристика в пределах рабочей зоны, ограниченной характеристиками =F(M, Uз.min) и =F(M, Uз.max), выражается уравнение прямой (8.44). Точки 1–5 механической характеристики АД в замкнутой системе соответствуют различным значениям относительного напряжения , поэтому линейную механическую характеристику электропривода в замкнутой системе можно рассматривать как множество точек, расположенных на разных механических характеристиках АД при разных значениях напряжения питания. При приближении механических характеристик к граничным в действительности происходит заметное отклонение от прямых (штрих-пунктирные кривые на рис.8.7). Скорости о,з идеального холостого хода являются фиктивными величинами, соответствующими точкам пересечения линейной механической характеристик с осью .
1.16. Pеостатное регулирование скорости асинхронного двигателя с фазным ротором
Реостатное регулирование скорости АД возможно при дискретном (ступенчатом) изменении сопротивления в цепи ротора или при плавном (импульсном) его регулировании. Рассмотрим сначала ступенчатое регулирование скорости АД.
В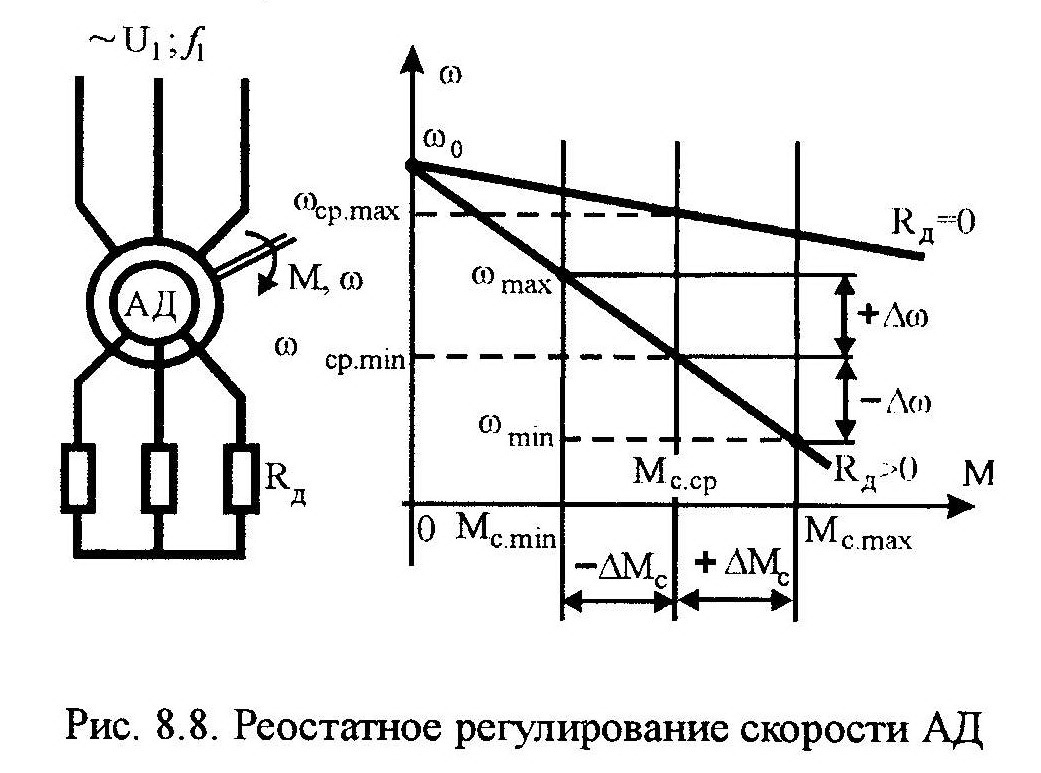 ведение
добавочного сопротивления Rд
в цепь ротора АД при постоянном статическом
моменте приводит к снижению скорости
(рис.8.8).
ведение
добавочного сопротивления Rд
в цепь ротора АД при постоянном статическом
моменте приводит к снижению скорости
(рис.8.8).
При изменении статического момента от Мс.min до Мс.max максимальное отклонение скорости max от среднего значения составит
 (8.60)
(8.60)
где min – минимальное значение модуля жесткости на искусственной (реостатной) механической характеристике.
Диапазон D регулирования скорости определяют, исходя из допустимого значения относительного падения скорости на низшей реостатной характеристике
 (8.61)
(8.61)
Принимая
 (8.62)
(8.62)
находим
 (8.63)
(8.63)
и подставляем в (8.61):
 (8.64)
(8.64)
откуда получаем
 (8.65)
(8.65)
Практически
диапазон регулирования скорости
находится в пределах 1,5 2.
Обычно берут число дискретных ступеней
n=3
6.
2.
Обычно берут число дискретных ступеней
n=3
6.
Достоинство реостатного регулирования заключается в простоте и невысоких затратах на реализацию. Недостаток состоит в том, что при постоянном моменте нагрузки потери мощности в роторе пропорциональны снижению скорости:
 (8.66)
(8.66)
При М=Мном и оном получаем
 (8.67)
(8.67)
т.е. с увеличением диапазона D регулирование скорости потери мощности возрастают. Электромагнитный к.п.д. при реостатном регулировании
 (8.68)
(8.68)
как следует из этого выражения, обратно пропорционален диапазону регулирования скорости.
При реостатном регулировании асинхронный двигатель работает при скольжениях, меньше критического, поэтому магнитный поток можно считать практически постоянным. Это значит, что регулирование скорости осуществляется при постоянном допустимом моменте, если охлаждение двигателя независимое. В связи с этим реостатное регулирование скорости целесообразно применять для электроприводов, работающих с постоянным статическим моментом (например, грузоподъемные механизмы).
1.17. ЧАСТ. УПР. А Д ПО ЗАКОНУ СТАБ. ПОТОКОСЦ. СТАТ. (Ψ1 = CONST).
На
основании
 и
и
 можно записать пропорцию :
можно записать пропорцию :
 (8.144)
(8.144)
и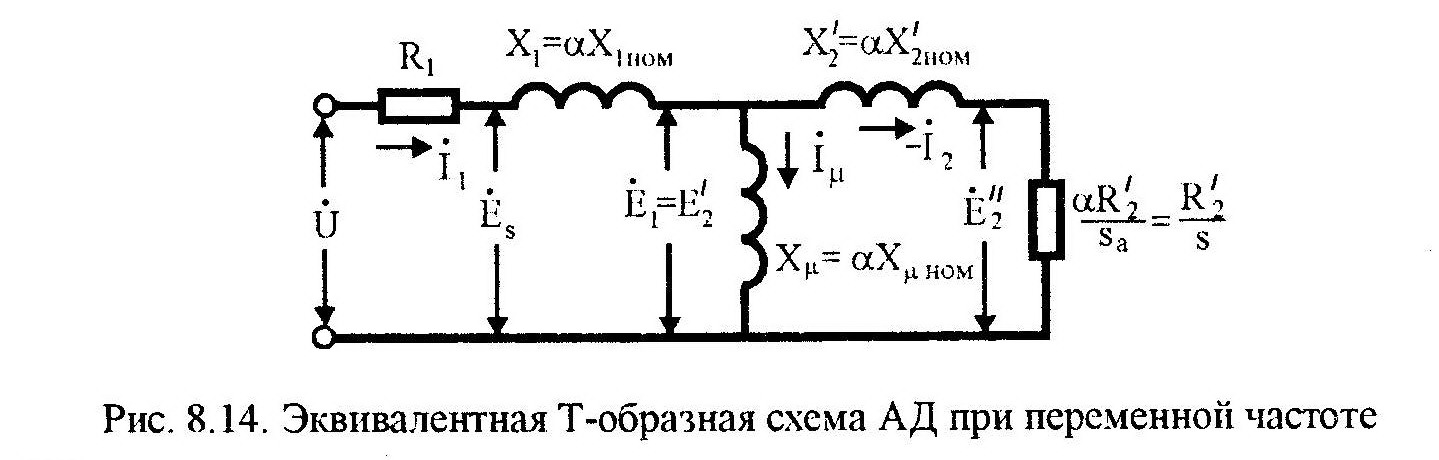 з
которой определяется действующее
значение ЭДС статора :
з
которой определяется действующее
значение ЭДС статора :

 (8.145) при
частотном упр. по закону 1=
const.
(8.145) при
частотном упр. по закону 1=
const.
Преобразуем эквив. Т- схему (Рис.8.14): в Г-образную
Для получения хар-тик и выяснения свойств АД при частотном упр. по указанному закону вынесем намагн. контур эквив. Т-образной схемы Рис.8.14 на зажимы a-b (Рис.8.21) , изменив при этом параметры схемы в соотв. с теорией эл. машин .
Обозначим :
 (8.146) где
(8.146) где (8.147)
(8.147)
Ks
– коэфф. магн. связи статора .Из Рис.8.21
и принятых обозначений (8.146) следует ,
что приведенный ток ротора :
 (8.148)
(8.148)
С
учетом (8.145) получаем :
 (8.149)
(8.149)
где действующее значение номинальной ЭДС статора Es.ном :
 (8.150)
(8.150)
Активное
сопр.
 на Рис.8.21 является эквив. для неподвижного
АД , где выделяется эл.магн. мощ. Поэтому
эл.магн. М трехфазного АД можно записать
в виде
на Рис.8.21 является эквив. для неподвижного
АД , где выделяется эл.магн. мощ. Поэтому
эл.магн. М трехфазного АД можно записать
в виде
 (8.151)
(8.151)