

4.7. Функциональная схема двухзонного регулирования скорости дпт. Структурная схема.
При двухзонном
регулировании скорости в первой зоне
поддерживается постоянным поток
возбуждения, напряжение и ЭДС изменяются,
во второй зоне поддерживается постоянным
ЭДС двигателя таким образом, чтобы поток
возбуждения был равен .
Задание скорости автоматически определяет
переход во вторую зону.
.
Задание скорости автоматически определяет
переход во вторую зону.

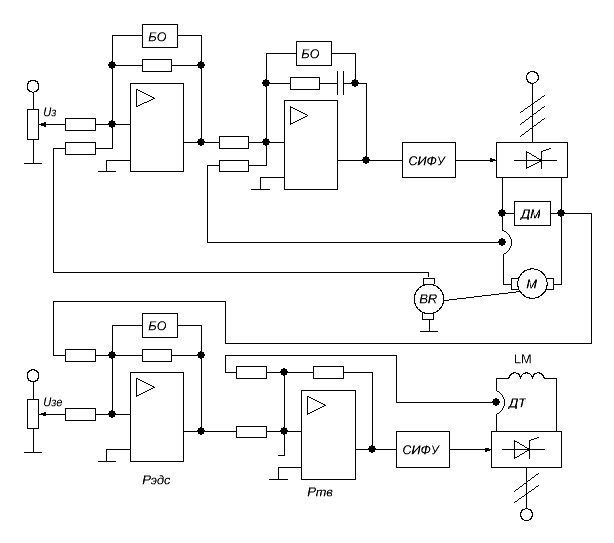
Функциональная схема:
Уравнения, описывающие систему:




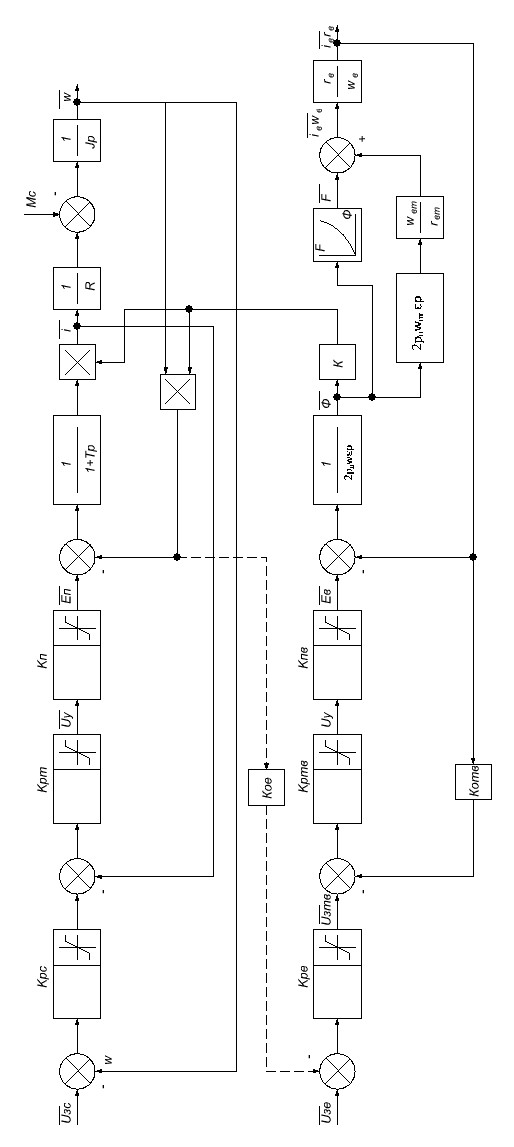
Структурная схема:
4.8 Функциональная и структурная схема векторной сау скоростью ад при частотном управлении.
Раздельное управление скоростью и потокосцеплением АД с КЗ ротором можно эффективно производить, используя принцип векторного управления. Координаты ЭП, измеренные в неподвижной системе координат, могут быть преобразованы к вращающейся системе координат, и из них могут быть выделены постоянные значения, пропорциональные составляющим векторов во вращающейся системе координат. По этим координатам и производится управление. Исходной информацией для построения системы векторного управления является информация о мгновенных значениях и пространственном положении вектора потокосцепления в воздушном зазоре, мгновенных значений токов и напряжений статора и скорости двигателя. Функциональная схема на рис. При ориентации координатной системы относительно вектора потокосцепления получаются наиболее удобные алгоритмы управления. Система имеет два канала управления: модулем вектора потокосцепления ротора и угловой скоростью ротора. Двухканальная система управления дает возможность осуществить независимое регулирование модуля вектора потокосцепления ротора и скорости ротора при сохранении прямой пропорциональности между моментом, развиваемым двигателем, и составляющей намагничивающей силы статора. Измеренные значения тока (датчиком тока ДТ) в неподвижной системе координат (x,y) преобразуются во вращающуюся систему координат (,) с помощью координатного преобразователя (КП1) с помощью сигнала от вектор-фильтра (ВФ). Кроме того, ВФ вычисляет модуль вектора потокосцепления. БК – блок компенсации для компенсации внутренней обратной связи по ЭДС. Преобразование сигналов задания из вращающейся системы координат в неподвижную осуществляется КП2. Далее сигналы подаются на преобразователь. Структурная схема системы управления на рис.
В системе регулирования скорости АД с подчиненной ОС по току i1β применяется локальная система стабилизации потокосцепления ротора, в которой применена подчиненная ОС по току i1α. Использование компенсационных связей, которые на структурной схеме не показаны, системе стабилизации потокосцепления ротора обеспечивается условие автономности. Это условие дает возможность выполнить синтез регуляторов потока (РПТ) и тока i1α(РТ1) с передаточными функциями Wр.пт(р) и Wр.т1(р) независимо от координат системы стабилизации скорости. Аналогичное условие автономности применимо и при синтезе регуляторов скорости (РС) и тока i1β (РТ2) с передаточными функциями Wр.с(р) и Wр.т2(р). Контуры регулирования токов i1α и i1β являются одинаковыми. Малой некомпенсируемой постоянной времени является постоянная Тпр.э. Регуляторы РТ1 и РТ2 целесообразно выбирать ПИ. В качестве ПИ регулятора целесообразно выбрать и РПТ. Синтез РС в системе векторного управления выполняется аналогично тому, как это делается в СУ ЭП постоянного тока при двухзонном регулировании скорости. Динамические характеристики аналогичны динамическим характеристикам системы управления ДПТ.Недостатком системы векторного управления является сложность управляющих и функциональных устройств при реализации преобразования координат и фаз.