

9.4. Опрацювання результатів виміру
Для отриманих даних по пунктах 2, 3 обчислити абсолютну похибку сельсинної індикаторної передачі кута за допомогою виразу
![]() (7)
(7)
де "В" і "Н" — напрямок руху сельсинів.
При цьому похибку ср, знайти при відключених і влючених опорах R3, R4, R5.
9.5. Зміст звіту
Звіт повинен вміщувати назву та мету роботи, схему проведення досліду (рис. 11.2), таблиці 1 та 2, розрахунки абсолютної похибки відпрацювання кута та динамічну похибку.
9.6. Контрольні питання
1. Призначення сильсинів.
2. В чому суть індикаторних режимів.
3. Пояснити похибку, яка спричинена зміною опору лінії зв'язку.
4. Як впливає момент оперу індикаторної дистанційної системи
5. Як пояснити динамічну похибку дистанційної передачі
9.7. Література
1. Иващенко Н.Н. Автоматичне регулювання. - М.: Машгиз, 1962, с. 7-31, 354-373, 392.
2. Попів Е.П. Автоматичне регулювання, 1960.
Лабораторная работа № 10
ДИСТАНЦИОННАЯ СЕЛЬСИННАЯ ПЕРЕДАЧА УГЛА В ТРАНСФОРМАТОРНОМ РЕЖИМЕ
Цель работы: изучение принципов работы сельсинной системы дистанционной передачи кутал трансформаторном режиме.
10.1. Теоретические положения
В трансформаторном режиме работы сельсинов статорные обмотки соединяются по схеме "звезда", а напряжение снимается из обмотки возбуждения СП. Схема включения сельсинов в трансформаторном режиме приведена на рис. 10.1.
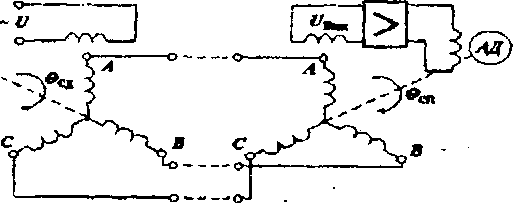
Рис. 10.1. Схема включения сельсинов в трансформаторном режиме.
В трансформаторном режиме напряжение питания подается только на обмотку возбуждения СД. Обмотка возбуждения СП подключается к входу усилителя, который руководит асинхронный двигателем АД, который перемещает нагрузка и вал СП.
Приведенные в синхронизирующих обмотках СД электродвижущие силы Есд вызывают тока в обмотках синхронизации СП, которая приводит к появлению магнитного потока в СП. Если кути сд = сп то в обмотке возбуждения СП не появляется ЕРС. При сд = сп результирующий вектор магнитного потока СП поворачивается на величину угла
= сд - сп (1)
что приведет к появлению в обмотке возбуждения СП напряжения
Uвих = Uвих. maxsin (2)
которая зависит от угла .
Это напряжение усиливается усилителем и вызывает обращение вала двигателя, который возвращает нагрузка и вал СП до тех пор, пока =0, т.е. сд = сп. Фаза исходного напряжения СП (0° или 180°) определяется знаком , что дает возможность с помощью фазочувствительного усилителя осуществлять реверс двигателя при изменении знака .
Напряжение, при котором двигатель приходит в движение, зависит от нагрузки на его вале, и при неизменном коэффициенте усиления имеет минимальное значение Uвих. mшт. При этом значении напряжения схема еще будет отрабатывать угол . Ведь увеличивая коэффициент усиления мы будем увеличивать точность работы схемы.
С другой стороны, величина сопротивления линии связи также будет влиять на величину Uвих, что будет отбиваться на точности отработки угла сп валом СП.