

2.2.4. Определение значения коэффициента динамичности системы в случае кинематического возбуждения .
Расчет системы начнем с определения коэффициента динамичности, этот коэффициент будет необходимо использовать в дальнейшем, при вычислении значений жесткости пружин. Из начальных данных берем значение коэффициента динамичности как отношение
Кд=[n]/nвибр=2/8=0.25
Так как платформа движется по закону h=Hsin(t) же для расчетов нам понадобится значение амплитуды колебаний системы. Амплитуда зависит от частоты колебаний системы и находится по формуле:
H()=nвg/2
2.2.5.Определение жесткостей пружин амортизаторов.
Целью данного расчета является определение жесткостей пружин для амортизаторов, используемых в нашей системы. Расчет начнем с определения собственных частот малых колебаний. Для составления уравнений, описывающих малые колебания механической системы, воспользуемся уравнениями Лагранжа Ирода. Под действием вибрации система будет совершать вынужденные линейные колебания. Согласно теории о линейных колебаниях при m1<<m2 коэффициент взаимовлияния в дифференциальных уравнениях будет мал и можно
рассматривать вместо заданной системы две независимые колебательные системы, показанные выше.
2.2.5.1.Определим жесткость пружины с1.
Составим уравнение Лагранжа для первой системы:
Кинетическая энергия системы (рис.1)
T1=1/2m2v12=1/2m2(x-h)2
Потенциальная энергия системы
П1=1/2с112=1/2*с1(1,5*l*-x)2
L=T-П=1/2m2(x-h)2-1/2*с1(1,5*l*-x)2
Уравнение Лагранжа в общем виде будет:
![]() =m2x-m2h;
=m2x-m2h;
![]()
![]() =
m2x-m2h;
=
m2x-m2h;
![]() =-c1x;
=-c1x;
L= m2x-m2h+c1x
x+![]() *x=h
*x=h
K1=![]() коэффициент
динамичности К[д]=0.25
коэффициент
динамичности К[д]=0.25
возьмем для частоты соответствующей fmin=40 Гц =251,2 [рад/с]
Отсюда жесткость пружины c1 будет вычслятся по формуле:
C1=K1 2*m2= 0.2*12620.2=2524.05 Н/м
2.2.5.2.Определим жесткость пружин С2,С3.
Сведем систему состоящую из двух пружин с2,с3 к системе состоящей из одной эквивалентной пружины сэкв. Запишем полученное соотношение:
Сэкв=1/2*с3*(5,5*l)2
C2=1/2*c2(4.5*l)2
C3=1/2*c3(0.5*l)2
Сэкв *(5,5*l)2=c2(4.5*l)2+c3(0.5*l)2
Сэкв *30,25*l2=c2*20,25*l2+c3*0.25*l2
Сэкв=![]() *с2+
*с2+![]() *с3=0,6694*с2+0,008264*с3 (*)
*с3=0,6694*с2+0,008264*с3 (*)
Составим уравнение Лагранжа для второй системы для Сэкв.
![]()
![]() =J*-
=J*-![]() l
m1*h+5,5*l2*Сэкв=+
l
m1*h+5,5*l2*Сэкв=+![]() =
=![]()
К2=К1*2 К22=К12 *4
![]() =4*2
=4*2![]()
Сэкв=4*2![]() *m1=4*63101,44*0,2*4=6675,19
Н/м
*m1=4*63101,44*0,2*4=6675,19
Н/м
Для простоты расчета возьмем нагрузку на 9*С3=С2, через соотношение длины площадки, тогда уравнение (*) примет вид:
Сэкв=0,6694*с3+9*0,008264*с3=6,032*С3=1106,629.
С2=1,49* Сэкв=1648,877 Н/м
С3=0,165* Сэкв=182,593 Н/м
2.2.6.Расчет графиков зависимости изменения коэффициента динамичности от частоты вынужденных колебаний
Введем в полученное уравнение Лагранжа (*) дополнительные коэффициенты K211,K212,K221,K222 для упрощения дальнейших вычислений изменения коэффициента динамичности системы k[д] при кинематическом возбуждении с изменением частоты f=40-70 Гц.
 (*)
(*)
K211=![]() =12620,28
=12620,28
K212=
![]() =1893,043
=1893,043
=1;
K221=![]() =873,7129
=873,7129
K222=![]() =902,6439
=902,6439
=![]() =2,538463
=2,538463
Подставим коэффициенты в систему уравнений Лагранжа и получим универсальную систему следующего вида:
Общее решение системы (в состоянии покоя) равен 0. Найдем частное решение, для чего подставим в универсальную систему значения линейной и угловой амплитуды, найдем скорость изменения амплитуды.
Линейная амплитуда: x=A*sint;
Угловая амплитуда: =B*sint;
Закон движения платформы: h=H*sint;
Скорости изменения амплитуд:
x=-2* A*sint;
=-2* B*sint;
h=-2*
H*sint; Н=![]()


Проверка условия равновесия (критерий Сильвестра) F=40 Гц.
 =-50481,152*(-62198,796)-
-(-873,712918)*(-1893,0432)= 3138212906
=-50481,152*(-62198,796)-
-(-873,712918)*(-1893,0432)= 3138212906
 =-78,4*(-62198,7961)-
-(-199,015538)*(-1893,0432)= 4499640,61
=-78,4*(-62198,7961)-
-(-199,015538)*(-1893,0432)= 4499640,61
 =
-50481,152*(-199,015538)- -(-873,712918)*( -78,4)= 9978034,52
=
-50481,152*(-199,015538)- -(-873,712918)*( -78,4)= 9978034,52
A=![]() ,
B=
,
B=![]() .
.
A= *H=
*H=![]() =0,001434
=0,001434
B= *H=
*H=![]() =0,00318
=0,00318
Aабс=A-H
Kд=![]()
Изменяя значения частоты колебаний системы f=40-70 Гц построим график зависимости изменения коэффициента динамичности от круговой частоты вынужденных колебаний. Шаг изменения частоты принимаем равным 5 Гц.
Таблица 2.2.6.1
|
, рад/с |
251,2 |
282,6 |
314 |
345,4 |
376,8 |
408,2 |
439,6 |
|
Kполученный |
0,154034 |
0,11574983 |
0,090595 |
0,073052 |
0,060271 |
0,050642 |
0,04319 |
|
Kд |
0,25 |
0,25 |
0,25 |
0,25 |
0,25 |
0,25 |
0,25 |
Г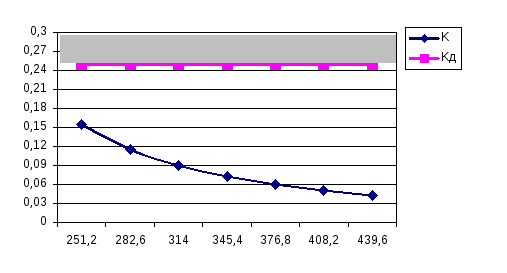 рафик
зависимости коэфициента динамичности
от изменения частоты колебаний.
рафик
зависимости коэфициента динамичности
от изменения частоты колебаний.
Графики зависимости амплитуды А колебаний от угловой частоты .
Таблица 2.2.6.2
|
, рад/с |
251,2 |
282,6 |
314 |
345,4 |
376,8 |
408,2 |
439,6 |
|
А |
0,001434 |
0,001095 |
0,000867 |
0,000705 |
0,000585 |
0,000494 |
0,000423 |

Графики зависимости амплитуды А колебаний от угловой частоты .
Таблица 2.2.6.3
|
, рад/с |
251,2 |
282,6 |
314 |
345,4 |
376,8 |
408,2 |
439,6 |
|
В |
0,00318 |
0,00250834 |
0,002029 |
0,001676 |
0,001407 |
0,001198 |
0,001033 |

СПЕЦИАЛЬНАЯ ЧАСТЬ.