

2.2. Расчет системы.
2.2.1 Определение количества степеней свободы
Для выполнения расчета и построения характеристик необходимо составление уравнения Лагранжа, причем уравнений должно быть столько, сколькими степенями свободы обладает система.
Числом степеней свободы механической системы (амортизированного объекта) называется минимальное число независимых координат, необходимых для полного определения положения всех точек системы в любой момент времени. Для реальных механических систем это число всегда велико, но в ряде случаев практически достаточен учет конечного числа существующих степеней свободы. Чаще всего оно равно числу возможных независимых свободных перемещений.
Таким образом, если объект имеет возможность свободного перемещения в пространстве, то он имеет три степени свободы.
Система с одной степенью свободы – это такая система для которой требуется только одна координата, чтобы полностью определить положение системы в любой момент времени.
Наша система обладает двумя степенями свободы, так как обладает возможностью перемещения поступательно с применением дополнительной амортизации.
2.2.2 Выбор обобщенных координат
Для выбора обобщенных координат сначала произведем упрощение нашей системы.
Система первого вида:
Сэкв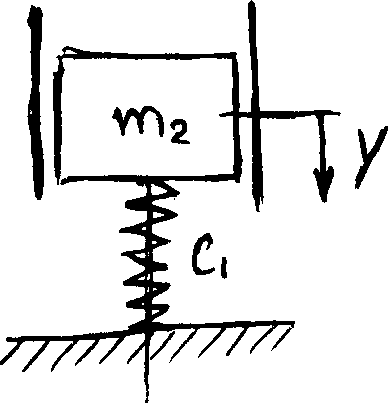

Рис. 2.2.1.1
Система второго вида:

Рис. 2.2.1.2.
Количество степеней свободы, находится как количество возможных перемещений системы (каждой ее сборной единицы)
S=2 – колличество степеней свободы равно 2;
Так же необходимо определение вида движения каждого отдельного элемента системы (поступательное, вращательное, сложное).
За обобщенные координаты возьмем:
x–координата перемещения элемента РЭА
(вид перемещения –поступательное).
q1=x
q2= - координата перемещения (вид перемещения –вращательное).
2.2.3. Уравнения Лагранжа для вычисляемой системы.
Разобив систему на несколько простых систем со количеством степеней свободы равных 1 (S=1), и составим для каждой системы уравнение Лагранжа. В общем виде уравнение Лагранжа записывается: L=T+П, т.е. общая энергия системы равна сумме его кинетической и потенциальной энергий.
Найдем общую кинетическую энергию системы 1:
1) T=T1+T2
T1=1/2m2v12=1/2m2(x-h)2 v1=x-h -кинетическая энергия элемента РЭА
T2=1/2m1v22+1/2J02 v2=R=1.5*l* =
v2=(1.5*l*-h) J0=1/12m2*4.5l1
x2=1.5*l*sin1.5*l*
-Кинетическая энергия амортизационной площадки.
T=1/2m2(x-h)2+1/2m1(5.5/2*l*-h)2+1/2J02 -общая кинетическая энергия.
Статическую деформацию не учитываем, она компенсируется весом.
Общая потенциальная энергия системы равна сумме потенциальных энергий каждого элемента:
П=П1+П2+П3
П1=1/2с112=1/2*с1(1,5*l*-x)2; -Пружина 1 сжимается под весом элемента РЭА на 1=1.5*l*-x
П2=1/2c222=1/2*c2(4.5*l*)2; - Пружина 2 растягивается на угол 2=4.5*l*
П3=1/2c332=1/2*c3(0.5*l*)2; - Пружина 3 сжимается на угол 3=0.5*l*
Далее найдем частные призводные для каждого перемещения системы как разницы потенциальной и кинетической энергии для последующего составления уравнений Лагранжа второго рода.
Для поступательного перемещения элемента РЭА:
Производная
![]() =m2(x-h)
=m2(x-h)
Производная
![]()
![]() =m2(x-h)
=m2(x-h)
Производная
![]() =-с1(1,5*l*-x)
=-с1(1,5*l*-x)
Уравнение Лагранжа в общем виде для поступательного перемещения элемента РЭА :
L=
![]()
![]() -
-![]() =
m2(x-h)-
с1(1,5*l*-x)=0;
=
m2(x-h)-
с1(1,5*l*-x)=0;
Для вращательного движения амортизационной площадки:
Производная
![]() =
=![]() l*m1*(
l*m1*(![]() l*-h)+J0*=
(J0+
l*-h)+J0*=
(J0+![]() *
m1)
-
*
m1)
-![]() l
m1*h;
l
m1*h;
Производная
![]()
![]() =J*-
=J*-![]() l
m1*h;
l
m1*h;
Производная
-![]() =-1,5*l*c1*(1.5*l*-x)-0.5*l*c3*(0.5*l*)-4.5*l*c2*(4.5*l*)=
=-(2.25* c1+0.25*
c3+20.25*
c2)*l2*+1.5*l*x*c1=0;
=-1,5*l*c1*(1.5*l*-x)-0.5*l*c3*(0.5*l*)-4.5*l*c2*(4.5*l*)=
=-(2.25* c1+0.25*
c3+20.25*
c2)*l2*+1.5*l*x*c1=0;
Уравнение Лагранжа в общем виде для вращательного перемещения амортизационной площадки будет:

Разделим верхнее уравнение на m1, а нижнее на J и получим систему вида:
