

5 Подтверждение рассчитанных характеристик путем моделирования
5.1 Соберём схему в Simulink – рисунок 8.
Р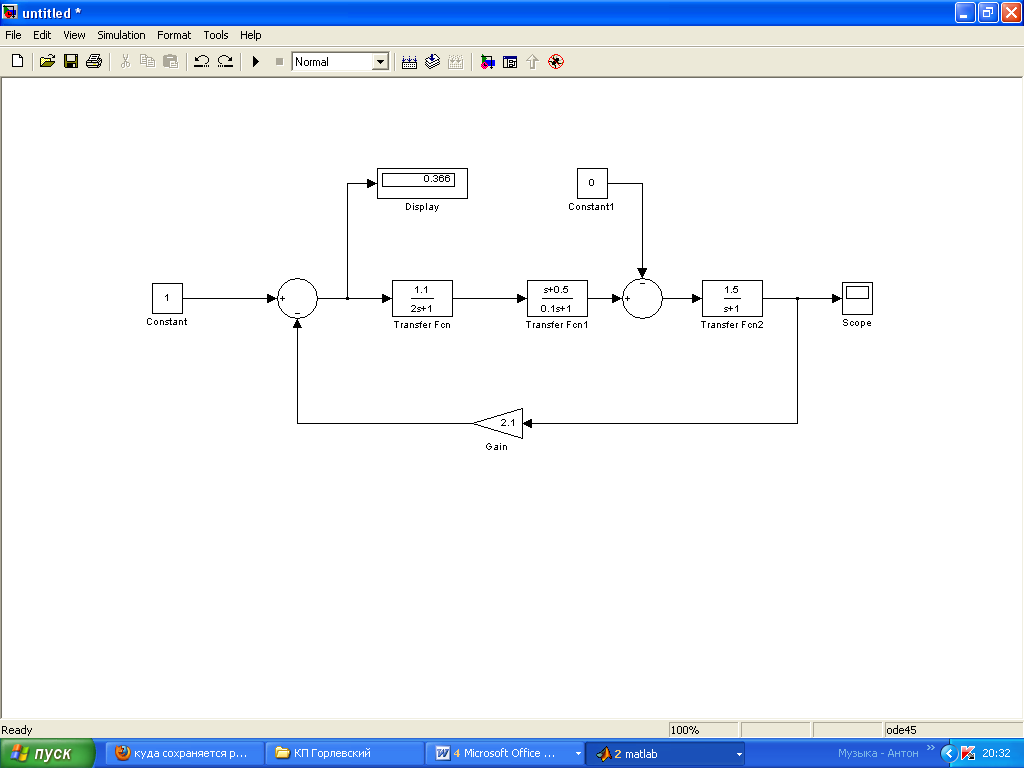 исунок
7. – Исходная структурная схема
исунок
7. – Исходная структурная схема
Получили переходную характеристику, которая представлена на рисунке 8.
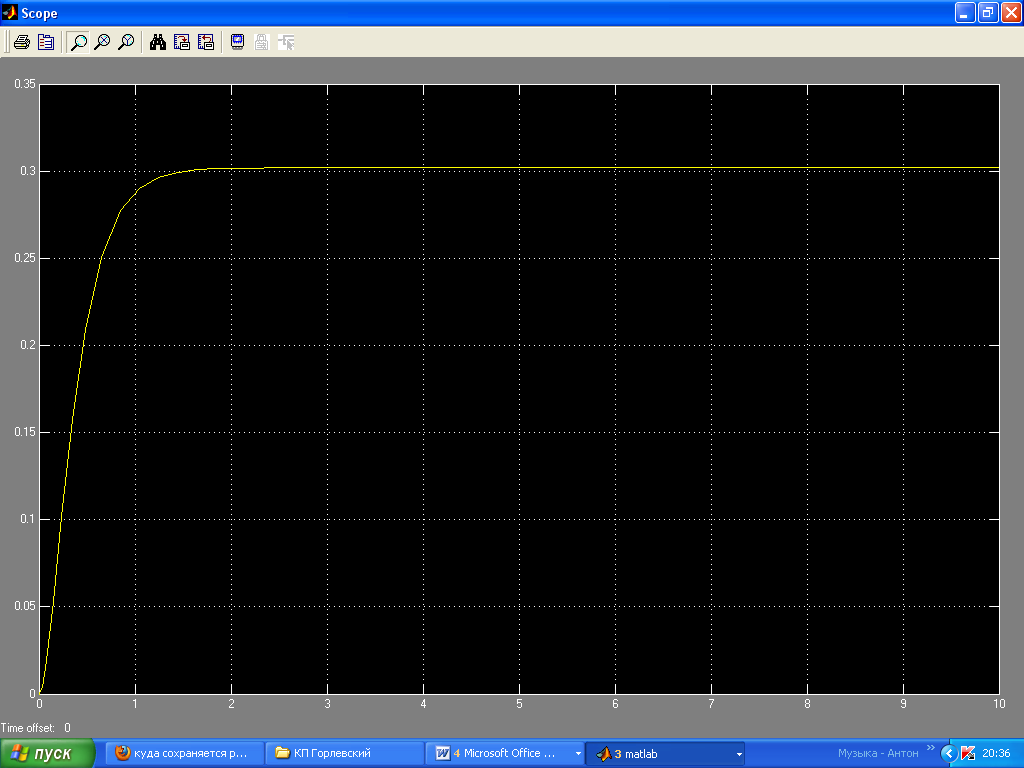
Рисунок 8. – График переходной характеристики
Полученная путем моделирования переходная характеристика идентична переходной характеристике, полученной аналитически.
5.2 Определим величину установившейся ошибки по входному сигналу, которая представлена на рисунке 9.

Рисунок 9. – Схема моделирования с определением установившейся ошибки по входному сигналу
Из рисунка 9 мы видим, что величина установившейся ошибки = 3,66. Это значение совпадает с величиной установившейся ошибки, вычисленной аналитически.
5.3 Определили величину установившейся ошибки по помехе, которая представлена на рисунке 10.
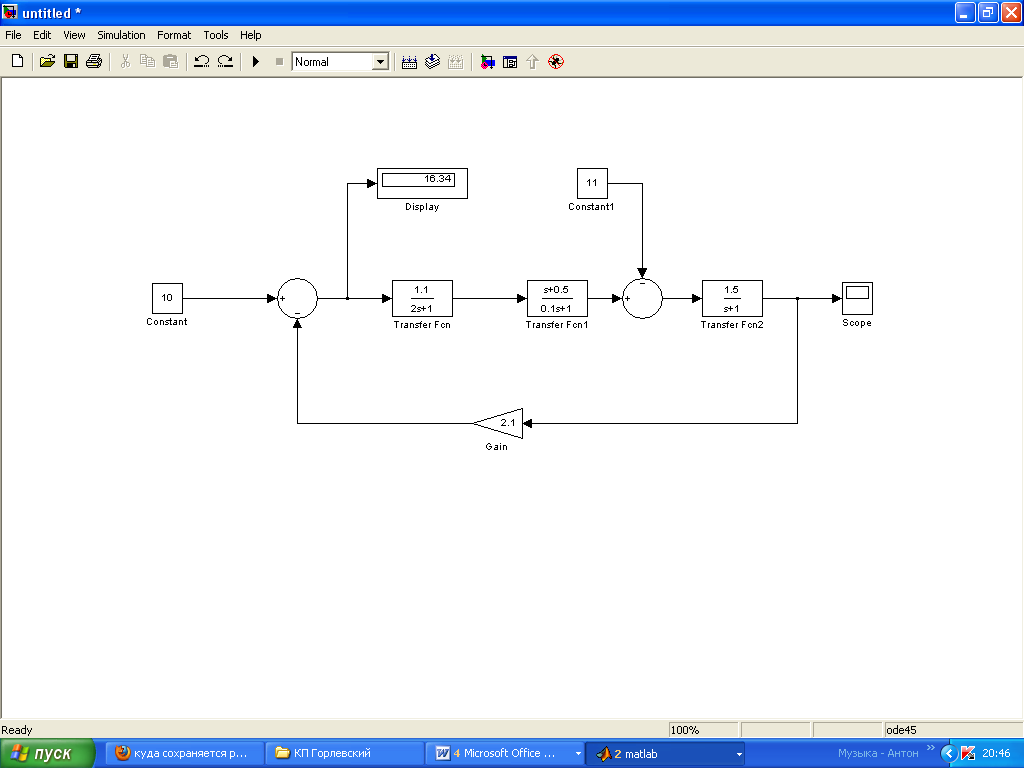
Рисунок 10. – Схема моделирования с определением установившейся ошибки по помехе
Из рисунка 10 мы видим, что величина установившейся ошибки = 16,34. Это значение совпадает с величиной установившейся ошибки, вычисленной аналитически.
Вывод: полученная путем моделирования переходная характеристика идентична переходной характеристике, полученной аналитически. Величины установившихся ошибок, вычисленные аналитически совпадают со значениями установившихся ошибок, полученных путем моделирования. Таким образом, мы подтвердили рассчитанные характеристики путем моделирования.
Заключение
В ходе выполнения курсового проекта было сделано исследование системы автоматического управления на устойчивость и точность, определение основных показателей качества САУ, характеристик САУ в векторно-матричном виде и подтверждение рассчитанных характеристик путем моделирования. Система представляла собой одноконтурную цепь с неединичной обратной связью.
Определили
передаточные функции системы. Передаточная
функция разомкнутой системы
![]() ,
передаточная функция замкнутой системы
,
передаточная функция замкнутой системы
![]() ,
передаточная функция по ошибке
,
передаточная функция по ошибке
![]() ,
передаточная функция по возмущению
,
передаточная функция по возмущению
![]() .
.
Определили область устойчивости с помощью критерия Гурвица для замкнутой системы. Для системы третьего порядка необходимым и достаточным условием устойчивости является:
1. положительность всех коэффициентов характеристического уравнения;
2. произведение средних коэффициентов должно быть больше произведения крайних.
Построили график области устойчивости, представленный на рисунке 2. Выбрали значения параметров регулятора в пределах области устойчивости: k=0,5, =1 и в дальнейшем учитывали их значения.
Определили устойчивость замкнутой системы по корням характеристического уравнения по критерию Найквиста. Все корни вещественные с отрицательной частью, система устойчива, характер движения апериодический.
Определили
устойчивость замкнутой системы по ЛАХ
и ЛФХ. Запас устойчивости по амплитуде![]() .
Запас устойчивости по фазе
.
Запас устойчивости по фазе![]() .
Определили основные показатели качества
САУ: время регулирования tp=4
c,
величина перерегулирования
.
.
Определили основные показатели качества
САУ: время регулирования tp=4
c,
величина перерегулирования
.
В
работе исследуется влияние параметров
системы (k,),
изменения её структуры и величины
входных воздействий на точность работы
системы. Точность работы системы
характеризуется величиной ошибки
системы, которая появляется при
воздействии на систему полезного
входного сигнала x(t)
и помехи f(t)
/4/. В установившемся режиме работы
системы величина установившейся ошибки
по входному сигналу
,
а по помехе
.
Определили матрицы
 ,
,
,
.
Система управляема и наблюдаема не
полностью, т.к. ранг матриц P
и Q
равен порядку системы в обоих случаях,
т.е. 3. Определили фундаментальную матрицу
для момента времени t=10
и начальных условий
.
Определили собственные числа матрицы
состояния
,
,
,
.
Система управляема и наблюдаема не
полностью, т.к. ранг матриц P
и Q
равен порядку системы в обоих случаях,
т.е. 3. Определили фундаментальную матрицу
для момента времени t=10
и начальных условий
.
Определили собственные числа матрицы
состояния
 .
Подтвердили, согласно теореме Ляпунова,
устойчивость системы.
.
Подтвердили, согласно теореме Ляпунова,
устойчивость системы.
Полученная путем моделирования переходная характеристика идентична переходной характеристике, полученной аналитически. Величины установившихся ошибок, вычисленные аналитически совпадают со значениями установившихся ошибок, полученных путем моделирования.
Таким образом, мы подтвердили рассчитанные характеристики путем моделирования.
Поставленные задачи на курсовой проект были выполнены. Закрепили полученные знания, навыки и применили их в расчётах.
Список литературы
Канушкин С.В. Теория Автоматического Регулирования: Учебное пособие. Министерство обороны РФ. – Серпухов 2009. – 222с.
Пушкарёв Ю.А., Пушкарёва Е.Ю. Теория Автоматического Управления. Министерство обороны РФ. – Серпухов 2010. – 476с.
Методы современной теории автоматического управления//под ред. Егупова Н.Д.- М: Учебник в 3-х т. МГТУ им. Н. Э. Баумана. - Москва 2004. - 748 с.
Вятков Н.М., Канушкин С.В., Романов О.В. Теория Автоматического Управления: Руководство к лабораторным работам. Издательско– полиграфический комплекс СВИРВ. – часть 1 – Серпухов 2006. – 48с.
Вятков Н.М., Канушкин С.В., Романов О.В., Бугаков И.А. Теория Автоматического Управления: Руководство к лабораторным работам. Издательско – полиграфический комплекс СВИРВ. - часть 2 – Серпухов 2007. – 56с.