

Задание на курсовой проект
Исходные данные:
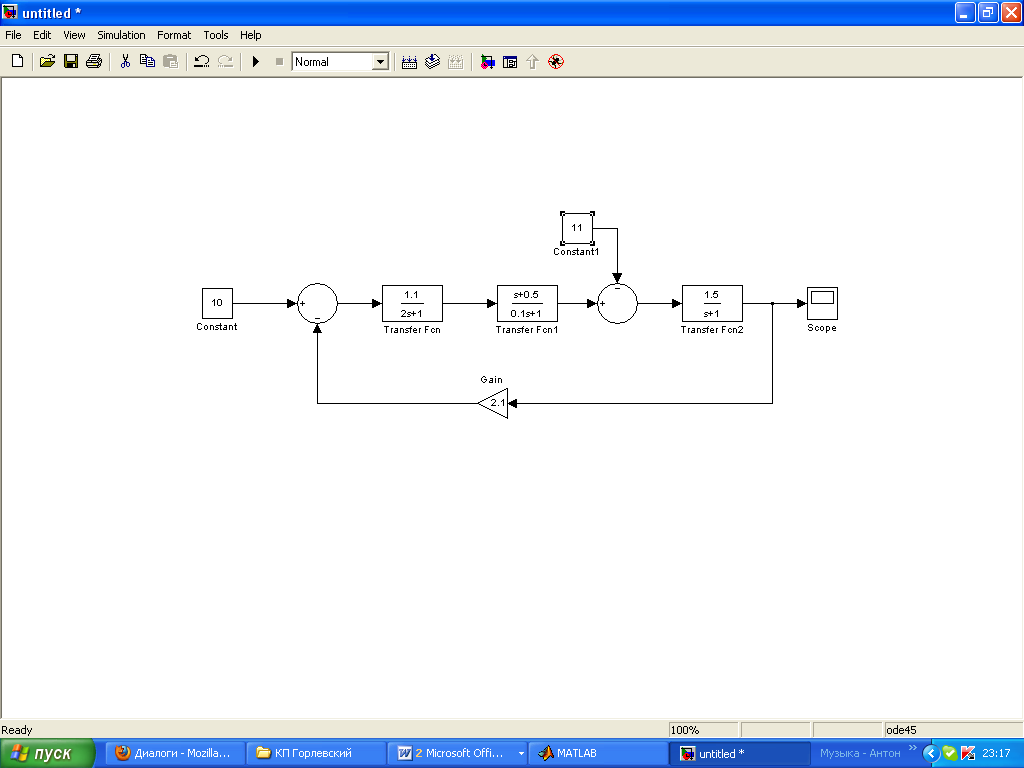
Рисунок 1. – Исходная структурная схема
Выполнить:
Определить передаточные функции разомкнутой, замкнутой систем, передаточные функции по ошибке и по возмущению;
Аналитически с помощью критерия Гурвица для замкнутой системы построить область устойчивости в параметрах регулятора k и . Выбрать их значение в пределах области устойчивости;
Определить устойчивость замкнутой системы по корням характеристического уравнения, по критерию Найквиста, по ЛАХ с помощью MatLab. По корням и полученным характеристикам определить запасы устойчивости по амплитуде и фазе, время регулирования, колебательность системы;
Рассчитать значение установившейся ошибки;
Записать уравнение системы в векторно-матричном виде. Определить матрицы A,B,C,D для случая измерения координаты системы. Определить управляемость, наблюдаемость системы, фундаментальную матрицу для момента времени t=10 начальных условий
 .
Определить положение системы, устойчивость
системы в векторно-матричном виде;
.
Определить положение системы, устойчивость
системы в векторно-матричном виде;Набрать схему в Simulink, подтвердить рассчитанные характеристики путем моделирования.
Введение
Автоматика — отрасль науки и техники, охватывающая теорию автоматического управления (ТАУ), а также принципы построения автоматических систем и образующих их технических средств.
Развитие автоматики тесно связано с развитием кибернетики. Кибернетика - это наука, занимающаяся установлением общих принципов и законов управления объектами различной физической природы для достижения ими определенных целей на основе получения, передачи, переработки и использования информации. Одной из основных частей кибернетики является техническая кибернетика - наука об управлении техническими устройствами, основу которой составляет ТАУ. Предметом изучения является разработка и техническая реализация общих принципов и методов управления объектами различной физической природы без непосредственного участия человека /2,1/.
Теория автоматического управления (ТАУ) – наука об общих закономерностях исследования (анализа) и построения (синтеза) технических систем. Является основой базовой технической кибернетики.
ТАУ представляет собой теоретическую базу науки об управлении техническими объектами, изучает общие принципы построения автоматических систем вне зависимости от физической природы технического объекта или процесса.
Любой технологический процесс можно расчленить на ряд более простых неравнозначных составных, но связанных между собой процессов. В связи с этим говорят, что в технологическом процессе выделяют рабочие операции, т.е. действия, непосредственным результатом которых является требуемая обработка материала, энергии, информации, и операции управления, обеспечивающие придание в нужные моменты нужных режимов, направлений и т.п.
Рабочие операции сопряжены с затратами энергии, и, если они выполняются человеком, то на их выполнение затрачивается его физическая сила. На операции управления затрачивается интеллектуальный труд человека, и эти операции требуют определенной квалификации исполнителя.
Замена труда человека в рабочих операциях работой машин и механизмов называется механизацией.
Совокупность операций управления образует процесс управления. Таким образом, под управлением понимают такую организацию того или иного процесса, которая обеспечивает достижение определенной цели.
Автоматизация – замена труда человека в операциях управления действиями технических управляющих устройств называется. Задача автоматизации состоит в осуществлении автоматического управления различными техническими процессами. Техническое устройство, выполняющее операции управления без непосредственного участия человека, называется автоматическим устройством.
Совокупность технических средств, выполняющих данный процесс, является объектом управления.
Совокупность средств управления и объекта образует систему управления. Система, в которой все рабочие операции и операции управления выполняют автоматические устройства, называется автоматической. Система, в которой автоматизирована только часть операций, другая же их часть сохраняется за людьми, называется автоматизированной (частично автоматической).
Частным случаем управления является регулирование. При регулировании координаты процесса (давление, температура, расход, положение и пр.) поддерживаются на заданном значении с помощью специальных устройств – автоматических регуляторов. Совокупность регулируемого объекта и автоматического регулятора образует систему автоматического регулирования. Объекты регулирования и управления по своей физической природе весьма разнообразны, но принципы построения систем управления и методы их исследования одни и те же /3/.
В данном курсовом проекте будет проводиться исследование заданной системы на устойчивость и точность. В ходе работы будут использоваться основные методы анализа и синтеза САУ, а также программное обеспечение Matlab.
1 Определение передаточной функции
Передаточная функция элемента или системы – отношение преобразования по Лапласу выходного сигнала к преобразованию по Лапласу входного сигнала при нулевых начальных условиях.
В зависимости от того, на какое входное воздействие ищется реакция (выходное воздействие) системы, передаточные функции делятся на виды. Рассмотрим их на примере одноконтурной системы с неединичной обратной связью, представленной на рисунке 1.
Обозначим передаточные функции:
![]()
![]()
![]()
![]()
В зависимости от того, какие сигналы выбираются в качестве входных и выходных различают 4 основных вида передаточных функций:
1.1
Передаточная функция разомкнутой
системы – исследует реакцию выходного
сигнала на сигнал ошибки
![]() .
.
![]() (1.1)
(1.1)
![]()
1.2
Передаточная функция замкнутой системы
– исследует реакцию системы (выходного
сигнала) на входное воздействие
![]() .
.
![]() (1.2)
(1.2)

1.3
Передаточная функция по ошибке –
исследует поведение ошибки на входное
воздействие
![]()
![]() (1.3)
(1.3)

1.4
Передаточная функция по возмущению –
показывает влияние возмущения либо на
входное воздействие, либо на сигнал
ошибки
![]()
![]() .
.
![]()
![]() (1.4)
(1.4)

Вывод:
Система называется разомкнутой, если у неё разомкнут основной контур обратной связи (на входе обратной связи суммирующий элемент). Замкнутая система включает в себя разомкнутую часть системы и сравнивающее утройство, которое вырабатывает сигнал ошибки путём вычитания сигнала обратной связи и задающего воздействия. Между перечисленными видами передаточных функций, существует взаимосвязь, которая позволяет не прибегать к грамоздким расчетам, а выразить одну передаточную функцию через другую.
2 Исследование на устойчивость и точность
Устойчивость – свойство системы возвращаться в исходное состояние после вывода из этого состояния и прекращения влияния возмущающего воздействия.
Реакция
системы на задающее входное воздействие
всегда состоит из двух составляющих:
собственного (свободного) ![]() движения и вынужденного движения
движения и вынужденного движения ![]() .
Для того что бы система могла обеспечить
регулирование в соответствии с входным
воздействием, составляющая собственного
движении
.
Для того что бы система могла обеспечить
регулирование в соответствии с входным
воздействием, составляющая собственного
движении ![]() должна затухать, т.е.
должна затухать, т.е.
![]() (2.1)
(2.1)
Собственное движение системы может быть определено из соотношения:
![]() (2.2)
(2.2)
Очевидно, что условие (2.1) может быть выполнено только тогда, когда каждое слагаемое из (2.2) стремится к нулю. А это условие, в свою очередь, может быть выполнено только тогда, когда вещественные части всех корней s характеристического уравнения отрицательны.
Таким образом, если вещественные части корней характеристического уравнения известны, то вопрос об устойчивости решён.
Правила, позволяющие судить о знаках корней характеристического уравнения без его решения, называются критериями устойчивости. Их можно разделить на алгебраические (основаны на составлении по данному характеристическому уравнению по определённым правилам алгебраических выражений, по которым можно судить об устойчивости САР (Система Автоматического Регулирования)) и частотные (основаны на исследовании частотных характеристик).
В условиях эксплуотации параметры системы по тем или иным причинам могут меняться в определённых приделах (старение, температурные колебания и т.п.). Эти колебания параметров могут привести к потере устойчивости системы, если она работает вблизи границы устойчивости. Поэтому стремятся спроектировать САУ так, чтобы она работала вдали от границы устойчивости. Степень этого удаления называют запасом устойчивости.
Определение запаса устойчивости по годографу Найквиста:
Запас
устойчивости по амплитуде (![]() )
характеризует удлинение годографа АФЧХ
разомкнутой САР от критической точки
(-1,j0)
в направлении вещественной оси и
определяется расстоянием h
от критической точки до точки пересечения
годографом оси абсцисс.
)
характеризует удлинение годографа АФЧХ
разомкнутой САР от критической точки
(-1,j0)
в направлении вещественной оси и
определяется расстоянием h
от критической точки до точки пересечения
годографом оси абсцисс.
Запас
устойчивости по фазе (![]() )
характеризует удаление годографа от
критической точки по дуге окружности
единичного радиуса и определяется углом
между отрицательным направлением
вещественной полуоси и лучом, проведённым
через начало координат в точку пересечения
годографа с единичной окружностью.
)
характеризует удаление годографа от
критической точки по дуге окружности
единичного радиуса и определяется углом
между отрицательным направлением
вещественной полуоси и лучом, проведённым
через начало координат в точку пересечения
годографа с единичной окружностью.
Алгоритм оценки запаса устойчивости по амплитуде и фазе по ЛАХ и ЛФХ:
построить ЛАХ и ЛФХ;
на частоте
 опустить
перпендикуляр до пересечения с линией,
соответствующей уровню
опустить
перпендикуляр до пересечения с линией,
соответствующей уровню
 .
Длинна перпендикуляра выраженная в
градусах, от ЛФХ до линии
будет соответствовать запасу по фазе
.
Длинна перпендикуляра выраженная в
градусах, от ЛФХ до линии
будет соответствовать запасу по фазе
 ;
;
на частоте
 провести
перпендикуляр до пересечения с осью
абсцисс 0дБ. Длина перпендикуляра,
выраженная в децибелах от ЛАХ до оси
0дБ соответствует запасу по амплитуде
провести
перпендикуляр до пересечения с осью
абсцисс 0дБ. Длина перпендикуляра,
выраженная в децибелах от ЛАХ до оси
0дБ соответствует запасу по амплитуде
 .
.
В данном курсовом проекте расчёт запасов устойчивости будет проводится с помощью встроенных функций Matlab.