

1.Охарактеризовать состав типовой структуры автоматизированного электропривода и объяснить назначение основных узлов.
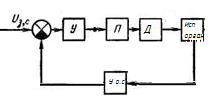
Автоматизированный электропривод представляет собой совокупность двигателя и механической системы и в отличие от электропривода отличается наличием цепи обратной связи и устройством для обработки и формирования управляющих сигналов. Измеритель рассогласования алгебраически суммируя задающий сигнал и сигналы поступающие с устройства обратной связи вырабатывает сигнал рассогласования, который затем поступает на усилитель. Усилитель в схемах автоматического управления электроприводами предназначен для увеличения мощности сигналов в канале управления. Преобразователь обеспечивает необходимое преобразование сигнала рассогласования в напряжение, поступающее на двигатель. Электродвигатель обеспечивает перемещение исполнительного органа. В данной схеме имеется цепь обратной связи для получения достоверной информации о параметрах электропривада. В качестве устройств обратной связи применяют датчики. Как правило, это датчики по напряжению, току и скорости. Датчик-это устройство предназначенное для получения сигналов обратных связей, пропорциональных контролируемым или измеряемым величинам.
2. Объяснить особенности работы типовой системы «преобразователь-двигатель постоянного тока» для поддержания скорости вращения двигателя.

На валу ДПТ находится датчик скорости — тахогенератор (ТГ), выходное напряжение которого пропорциональное скорости ДПТ и является сигналом обратной связи. Uтг=γω=Uо.с. Сигнал обратной связи сравнивается с задающим сигналом скорости и их разность в виде сигнала рассогласования подается на вход дополнительного усилителя У, который с коэффициентом kу усиливает сигнал рассогласования и подает его в виде сигнала управления на вход преобразователя П.
Рассмотрим физическую сторону задачи стабилизации скорости в данной замкнутой системе. Пусть, по каким либо причинам в системе электропривода увеличилась нагрузка, что привело к уменьшению скорости вращения двигателя. В соответствии с уравнением U=Uо.с-Uзад. сигнал рассогласования увеличит свое значение. Данный сигнал поступает на преобразователь, который в соответствии с данным сигналом вырабатывает и подает ДПТ большее напряжение. Соответственно скорость двигателя восстанавливает прежнее значение.
3.Охарактеризовать особенности регулирования скорости дпт в системе «преобразователь-двигатель»: принцип и схема регулирования, особенности.
На валу ДПТ находится датчик скорости — тахогенератор (ТГ), выходное напряжение которого пропорциональное скорости ДПТ и является сигналом обратной связи. Uтг=γω=Uо.с. Сигнал обратной связи сравнивается с задающим сигналом скорости и их разность в виде сигнала рассогласования подается на вход дополнительного усилителя У, который с коэффициентом kу усиливает сигнал рассогласования и подает его в виде сигнала управления на вход преобразователя П.
Рассмотрим физическую сторону задачи стабилизации скорости в данной замкнутой системе. Пусть, по каким либо причинам в системе электропривода увеличилась нагрузка, что привело к уменьшению скорости вращения двигателя. В соответствии с уравнением U=Uо.с-Uзад. сигнал рассогласования увеличит свое значение. Данный сигнал поступает на преобразователь, который в соответствии с данным сигналом вырабатывает и подает ДПТ большее напряжение. При уменьшении момента нагрузки обратная связь действует в другом направлении, сигнал рассогласования будет уменьшать свое значение, следовательно преобразователь будет вырабатывать и подавать на ДПТ меньшее напряжение.