

Лекции 9-11 Управляемые системы Основные понятия
Управление - такая организация изучаемого процесса на основе имеющейся информации, которая направлена на достижение определённых целей, т.е. целенаправленное воздействие на объект или процесс.
Основными элементами САУ являются: ОУ и УУ (сравнивает выход управляемого объекта с желаемым и в зависимости от результата вырабатывает управляющий сигнал на объект).
Рассмотрим подробнее ОУ и выделим характеризующие его переменные:
управляющие воздействия (u1, … um) – это такие переменные, с помощью которых можно влиять на поведение объекта;
выходные переменные (у1, … ур) – доступные измерению величины, которые отражают реакцию объекта на управляющие воздействия;
переменные состояния (х1, … хn) – внутренние и часто недоступные измерению переменные, которые определяют состояние объекта в каждый момент времени, причем nm;
возмущающие воздействия (f1, … fl) – отражают случайные воздействия окружающей среды на объект управления и обычно недоступны измерению. Требование парирования их влияния приводит к необходимости создания систем автоматического управления.
Каждый объект управления (ОУ) как некоторая конструкция имеет регулирующий орган (РО), изменение положения которого приводит к изменению переменных состояния. В качестве РО в организационных системах выступает организация, администрация. Если количество РО и переменных состояния больше двух, то ОУ называется многомерным, в противном случае - одномерным.

С информационной точки зрения процесс замкнутого управления состоит из следующих этапов (подпроцессов).
получение информации о задачах и целях управления (планирование) ( поток информации);
получение информации о результатах управления, т.е. о состоянии ОУ на данный момент (анализ состояния ОУ);
анализ полученной информации и принятие решения ( возмущения в системе);
исполнение принятого решения в виде перемещения (движения) РО и установление их в требуемое положение (состояние).
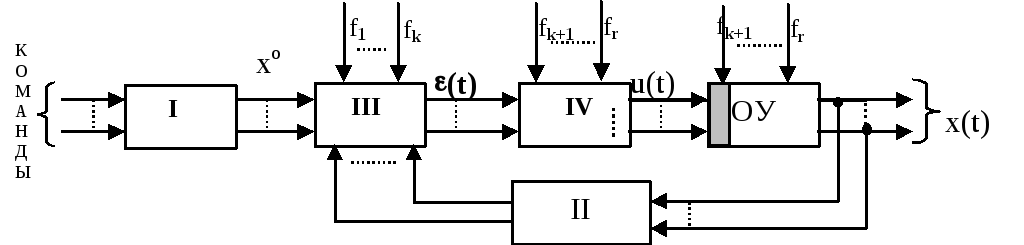
Каждому из указанных процессов соответствует своя система, которая может иметь различную физическую природу. Например, если ОУ является техническим объектом, то II - информационно-измерительная система (система датчиков и преобразователей), I - формирователь программы управления, III - управляющее устройство, вычислительная система (спецмикропроцессор), выдающая сигнал управления, IV - исполнительная система (система приводов: гидро-, электро-, пневмо-), перемещающая РО (регулирующий орган).
Пример САУ: Система стабилизации скорости вращения двигателя постоянного тока с независимым возбуждением. Ее цель – поддержание заданной скорости вращения двигателя при действии «нагрузки» на валу (металлорежущие станки, где независимо от глубины резания металла нужно выдержать заданную скорость вращения). Система стабилизации температуры в холодильнике при изменении массы и температуры закладываемых продуктов или при открывании дверей.
Здесь Uзад – сигнал, соответствующий заданной температуре; УМ – усилитель мощности с релейной характеристикой, который используется в качестве управляющего устройства, он включает или отключает холодильный агрегат (ХА), «прокачивающий» хладоагент через трубки камеры; ДТ –датчик температуры, выходной сигнал Uк которого пропорционален температуре камеры.
Если ОУ - производство, то I - планирование производства, II оценка текущего состояния производства, III - оценка отклонения от выполнения плана и принятие решений по ликвидации этих отклонений (например, за счёт перераспределения ресурсов), IV - исполнение управленческого решения (доставка ресурсов на рабочие места). РО - люди, машины.
Если ОУ - Армия: I, – штаб по выработке стратегии (плана боевых действий); III – тактики (алгоритма) конкретного поведения в боевых условиях по данным разведки – (II) и выдача приказов, исполнение приказа (IV) на местах.
Если ОУ – (биосистема), то I – человеческий организм, III – мозг, где записана программа и алгоритм её реализации, II – система рецепторов, IV - система мышц, а нервная система осуществляет передачу сигналов.
Отметим, что в устройстве IIIпринятие решения может осуществлять человек (ЛПР): лётчик - ЛА.
В чём проблема управления?
Г
 лавная
задача (цель) управления
состоит в том, что в каждый момент времени
вектор выходных координат (у нас: вектор
состояния) был бы равен заданному вектору
x°(t),
т.е. x(t)
= x°(t).
лавная
задача (цель) управления
состоит в том, что в каждый момент времени
вектор выходных координат (у нас: вектор
состояния) был бы равен заданному вектору
x°(t),
т.е. x(t)
= x°(t).
x°(t) – плановое значение управляемой координаты.
Главная проблема управления - как своевременно и с высокой точностью достичь цель при действии возмущений, т.е. в условиях помех, противодействия и дефицита ресурсов? Эта задача решается с использованием принципов управления.