

Практика эмс и орт
2-ой семестр
Тема 4. Принципы построения систем регулирования
4.1.1 Задачей регулирования является поддержание X – заданной (регулируемой) величины в соответствии с W. В процессе регулирования происходит измерение X, сравнение с эталоном W и выработка управляющего воздействия Y. Изменение X обусловлено внешним возможным воздействием (возмущением) Z. Закон поддержания X – задающее воздействие W.
4.1.2. Свойства систем регулирования.
1. Замкнутые контуры.
2. Направленность распространения воздействия ( но не энергии ).
3. Передачи контуров < 0 .
4. Время регулирования равно времени работы системы – дX
4.1.3. Принципы построения систем регулирования.
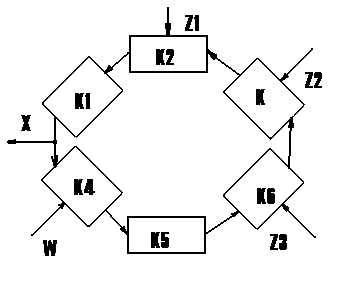
Схема регулирования может быть преобразована (рис.1) следующим образом: объединим все элементы, из которых X выходит и также входит, т.е. элементы, в которые входит имеем:

Yk – выходная величина регулирования
Ys – входная величина регулируемого объекта
Ys = Z – Yr , сигнал рассогласования
Xw = X – W , сигнал на входе регулирования
4.1.4. Граф системы.

Ys = Z – Yr
Xw = X – W
Yr – выходная величина регулятора
Xw – входной cигнал регулятора
4.2. Законы регулирования определяются:
4.2.1) Переходными функциями в звеньях. Регуляторы также исследуются по их переходным функциям.
|
Тип регул-ра |
Закон |
Характ. Перех. Проц. |
||
1 |
П-регул. |
Y=K*X |
|
|
|
2 |
И-регул. |
Y=Xdt |
|
|
|
3 |
Д-регул. |
Y=dXdt |
|
|
|




4.2.2) Одно- и многоконтурные системы регулирования.
Одноконтурные- изменение Х вызывает Х во всех последующих.
Многоконтурные- вводится дополнительная величина на вход регулятора(Х+Х1) , вводится дополнительное воздействие(Y+Yн), вводится дополнительная связь(Yн=Yм(Z))


4.2.3) Регулирование и управление.
Отличительным признаком регулир-я и управления является наличие замкнутого звена.
Граф управляемого звена:
![]()
Управлением можно решать ту же задачу, что и регулированием.
Например:
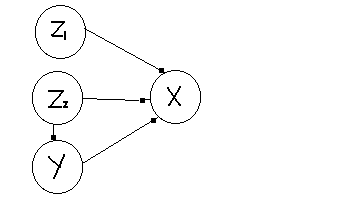
Х может быть равно Const т.к. Z2 измер-ся.
4.2.4. Свойства управления
1.Измерять Z
2.Знать хар-ки X и Y
3.Система управления всегда устойчива(нет замкнутых контуров)
4.При правильной настройке нет кратковременного отклонения Х.
4.2.5 Алгоритмы построения САУ , САР .
1.Строится модель регулируемого объекта (граф).
Выбираются регулируемые величины X1...Xn .
Синтезируется закон регулирования .
Строится модель регулятора (граф) .
Определяются возмущающие воздействия и точки их приложения .
Строится модуль всей системы в целом .
4.3Способы регулирования .
В зависимости от закона регулирования - способы регулирования .
В ЭМП, как правило, регулирование осуществляется по электрическому
сигналу (U , реже I) . При этом различают ведется ли регулирование в системе постоянного или переменного тока .