

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное агентство по образованию
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
КОМИ ГОСУДАРСТВЕННЫЙ ПЕДАГОГИЧЕСКИЙ ИНСТИТУТ
ФИЗИКО-МАТЕМАТИЧЕСКИЙ ФАКУЛЬТЕТ
КАФЕДРА ИНФОРМАТИКИ И ВЫЧИСЛИТЕЛЬНОЙ ТЕХНИКИ
Допустить к защите
зав. кафедрой
________________В.В.Исакова
«___»__________ 2010 г.
Выпускная квалификационная работа
Шаговый двигатель
Научный руководитель
к.ф-м.н., доцент ____________ Сметанин А.И.
Исполнитель
студент 153 гр. _____________ Шевелёв Игорь Васильевич
Сыктывкар – 2010
Оглавление
Введение
Глава 1. Виды, устройство и принцип работы шаговых двигателей
1.1 Общие принципы шаговых двигателей…………………………..4
1.2 Виды шаговых двигателей ………………………………………..6
1.3 Способы управления фазами ШД………………………………..15
Глава 2. Контроллеры шаговых двигателей
2.1 Управление шаговым двигателем с
помощью автономного контроллера…………………………………18
2.2 Управление шаговым двигателем……………………………….20
с использованием ЭВМ
2.3 Реализация адаптера шагового двигателя.……………………..21
Глава 3. Управление контроллером с помощью системы программирования PureBasic
3.1 Система программирования PureBasic………………………….24
3.2 Синтаксис………………………………………………………….26
3.3 Сравнение с Basic и Pascal………………………………………..26
3.4 Особенности PureBasic…………………………………………....27
3.5 Программирование LPT порта…………………………………...28
Глава 4. Модель крана как пример применения шаговых двигателей
4.1 Устройство модели………………………………………………..30
4.2 Программа управления краном на языке программирования…31 PureBasic
Заключение…………………………………………………………………..33
Список литературы………………………………………………………….34
Приложения
1. Моделирование элементов устройств управления механизмами……..35
2. Параллельный порт IBM PC…………...…………………………………37
3. Видеофильм о шаговых двигателях……………………………………..38
4. Текст программы управления краном…………………………………...38
5. Результаты моделирования в программе MicroCap 7
устройства выработки управляющих импульсов на D-триггерах……….45
6. Справочный материал по шаговым двигателям ДШИ-200
отечественного производства…... …………………………………………46
Введение
Актуальность:
Уже довольно долгое время используются шаговые двигатели в технике. В составе некоторых устройств, например, в принтерах, дисководах для гибких дисков и других устройствах, имеются шаговые двигатели. Однако информацию по их применению иногда сложно найти. В своей работе я сконцентрировал информацию по шаговым двигателям и их применению.
Цель работы:
Изучение шаговых двигателей и их применения.
Задачи:
Изучение соответствующей литературы
Изучение портов ЭВМ
Реализация контроллера шагового двигателя
Изучение системы программирования PureBasic
Разработка и изготовление модели на шаговых двигателях
Разработка программного обеспечения
Глава 1. Виды, устройство и принцип работы шаговых двигателей [6]
1.1 Общие принципы шаговых двигателей
Шаговый двигатель – механическое устройство, преобразующее электрические импульсы в механическое, причём, в отличие от других двигателей, «управляемое» движение, т.е. угол поворота ротора зависит от количества поступивших на двигатель импульсов. Шаг такого двигателя – величина угла поворота ротора за один поданный импульс. Внешне шаговый двигатель не отличается от двигателей других типов. Обычно это – цилиндрический корпус, вал, несколько выводов. (рис.1.1)
Шаговые
двигатели обладают некоторыми уникальными
свойствами, что делает порой их
исключительно удобными для применения
или даже незаменимыми, а именно:
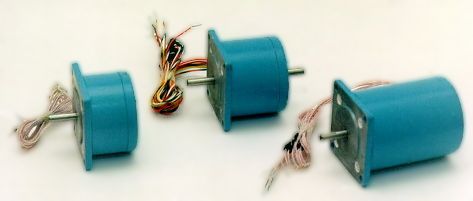
Рис.1.1 Внешний вид ШД семейства ДШИ-200.
-угол поворота ротора определяется числом импульсов, которые поданы на двигатель
-двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны)
- Хорошие шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не накапливается от шага к шагу
-возможность быстрого старта/остановки/реверсирования
-высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников
-однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи(т.е. без дополнительных затрат на устройства реализующие ОС – датчики положения ротора, согласование их с устройством управления и т.д.)
-возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора
-может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов
Также существуют некоторые недостатки:
- Шаговым двигателям свойственен нежелательный эффект, называемый резонансом. Эффект проявляется в виде внезапного падения момента на некоторых скоростях. Это может привести к пропуску шагов и потере синхронности. Эффект проявляется в том случае, если частота шагов совпадает с собственной резонансной частотой ротора двигателя
-возможна потеря контроля положения ввиду работы без обратной связи
-потребление энергии не уменьшается даже без нагрузки
-затруднена работа на высоких скоростях
-невысокая удельная мощность
-относительно сложная схема управления