

2 Пример выполнения работы
Синтез модальных регуляторов пониженного порядка.
Дан объект управления
![]() ,
где
,
где
![]() . (12)
. (12)
Требования к качеству управления задаются областью S:
, (13)
где
![]() ,
,
![]() .
.
Необходимо синтезировать модальные регуляторы полного и сокращенного порядков, по возможности обеспечивающие заданные требования к качеству управления.
Решение.
1. Синтез модального регулятора полного порядка. Для расчета модального регулятора полного порядка объект управления (12) представим в операторном виде:
![]() ,
(14)
,
(14)
где
![]() ,
,
![]() .
.
Регулятор полного порядка ищется на классе звеньев 2-го порядка:
![]() .
.
Расчетный эталон
во всех трех случаях будем назначать
по биномиальной схеме с быстродействием
![]() ;
при
этом в
случае полного
порядка
эталон принимает вид
;
при
этом в
случае полного
порядка
эталон принимает вид
![]() .
.
Расчет матриц C, X и d осуществляется по методике, изложенной в предыдущей лабораторной работе (см. формулы (9)-(11); подставляя в них коэффициенты объекта и эталона), получаем:
 ,
,
 ,
,
 .
.
Вектор коэффициентов регулятора находится из матричного уравнения
![]() ,
,
решая которое получаем
![]() .
.
2. Синтез
по «доминирующей динамике».
Необходимо
отметить, что множители
![]() и
и
![]() в операторной передаточной функции
в операторной передаточной функции
![]() обладают следующими свойствами:
обладают следующими свойствами:
1) их корни находятся внутри заданной области S;
2) их корни расположены близко друг от друга (по отношению к другим корням в и к границе области S).
Следовательно, в первом приближении данные множители можно сократить, тем самым понизив порядок объекта с третьего до второго. В результате исходный объект управления (12) представляется в следующем виде:
![]()
где
![]() ,
,
![]() ,
,
операторы «доминирующей динамики», а
![]() ,
,
![]() ,
,
операторы
«структурных возмущений».
«Сокращенная» модель объекта управления
![]() имеет второй порядок, при этом модальный
регулятор для данной системы ищется в
виде звена первого порядка:
имеет второй порядок, при этом модальный
регулятор для данной системы ищется в
виде звена первого порядка:
![]() .
(15)
.
(15)
Вектор коэффициентов
![]()
модального регулятора (15) находится аналогично модальному регулятору полного порядка, поэтому, опуская все расчеты, приведем только окончательный результат:
![]() .
.
3. Синтез по «среднеквадратичному отклонению». Для объекта управления (12) регулятор пониженного порядка ищется в виде звена первого порядка (15). В результате расчетный эталон будет иметь четвертый порядок:
![]() .
.
Матрицы C, X и b (определяемые формулами (9), (10) в предыдущей лабораторной работе, и формулой (9) в текущей) равны
 ,
,
 ,
,
 .
.
Матрицу
![]() ,
определяющую метрику в пространстве
коэффициентов характеристического
полинома замкнутой системы, назначим
в виде
,
определяющую метрику в пространстве
коэффициентов характеристического
полинома замкнутой системы, назначим
в виде
![]() .
Матрица
.
Матрица

существует, при этом искомый вектор настроек регулятора X может быть найден из выражения (10); подставляя в (10) матрицы C, Q и b, окончательно получаем
![]() .
.
Переходные процессы в замкнутых системах для всех трех случаев показаны на рис. 2 (графики 1, 2 и 3 соответственно).
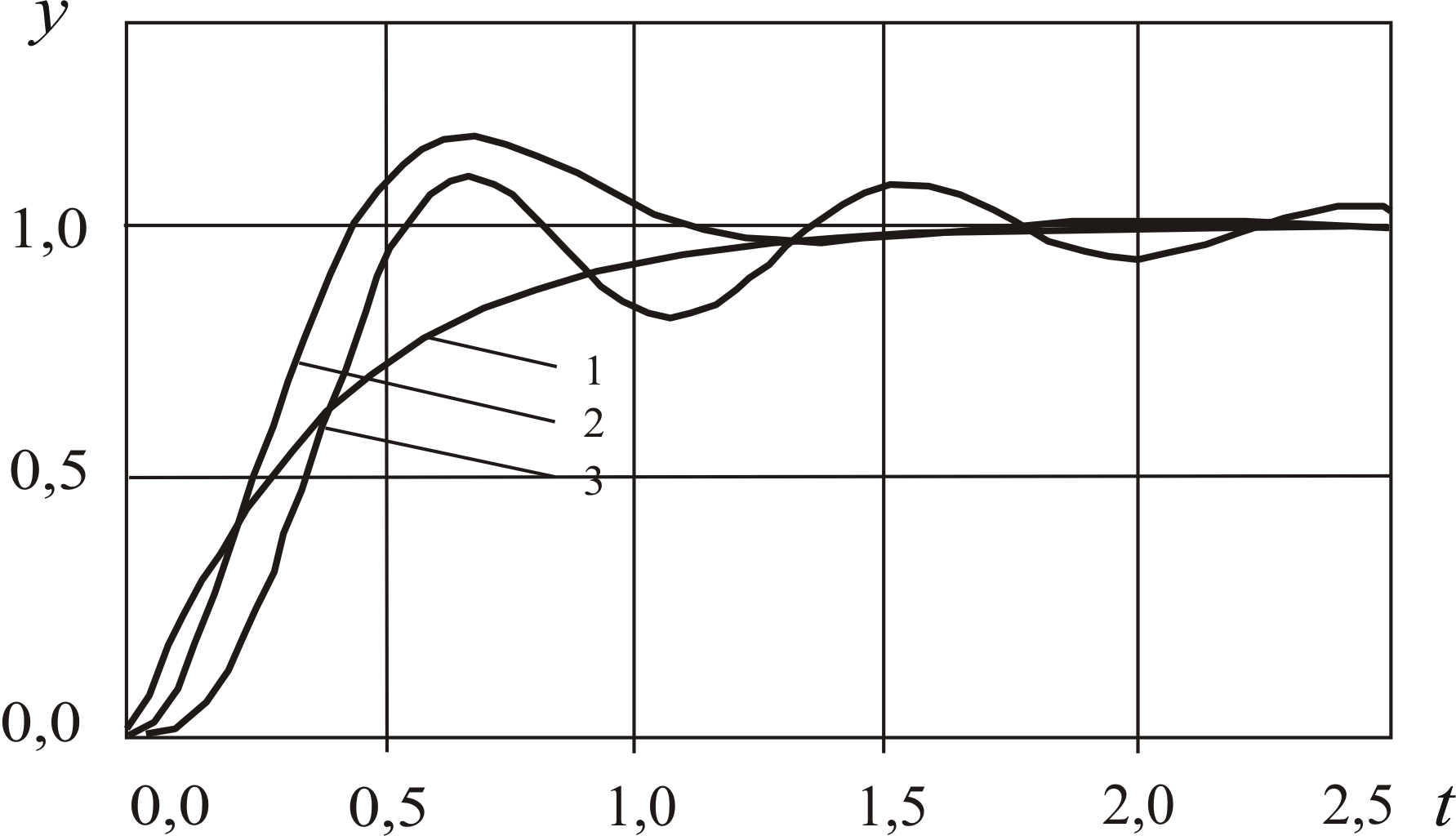
Рис. 2. Переходные процессы в замкнутой системе
Первому графику
соответствует
![]() и
и
![]() ;
второму –
;
второму –
![]() и
;
третьему –
и
;
третьему –
![]() и
и
![]() .
Сравнивая полученные показатели качества
с заданными (13):
.
Сравнивая полученные показатели качества
с заданными (13):
![]() ,
,
![]() %,
%,
можем сделать вывод, что переходные процессы 1 и 2 удовлетворяют требуемым показателям качества.