

2.13 Передаточные функции систем автоматического регулирования
Общая структурная схема одномерной САР представлена на рис. 2.13.1. На структурной схеме возмущающее воздействие F приведено к выходу системы.
Рис. 2.13.1 Общая структурная схема одномерной САР:
Wз передаточная функция задатчика; Wф передаточная функция устройства, формирующего управляющее воздействие на объект; WОУ передаточная функция объекта управления по управляющему воздействию; WOF передаточная функция цепи от места приложения возмущающего воздействия до выхода системы (передаточная функция объекта управления по возмущающему воздействию, если возмущающее воздействие приложено к объекту); WД передаточная функция датчика; YЗ управляющее (задающее) воздействие на систему; Хз сигнал задатчика; ХД сигнал датчика; ес сигнал ошибки; Хy управляющее воздействие на объект; Yy реакция объекта на управляющее воздействие; YF реакция объекта на возмущающее воздействие;
Y регулируемая величина
При исследовании систем необходимо определить, как изменяется регулируемая величина Y и ошибка е = Yз –Y при изменениях управляющего воздействия Yз и возмущающего воздействия F. Для этого пользуются четырьмя передаточными функциями. При получении этих передаточных функций следует иметь в виду, что согласно принципу суперпозиции изменение регулируемой величины системы Y складывается из изменения регулируемой величины при изменении управляющего воздействия Yз на систему и изменения регулируемой величины при изменении возмущающего воздействия F. Аналогичным образом изменение ошибки системы е складывается из изменения еу ошибки системы при изменении управляющего воздействия Yз на систему и изменения еF ошибки системы при изменении возмущающего воздействия F. Поэтому при получении передаточных функций по управляющему воздействию принимают F = 0, а при получении передаточных функций по возмущающему воздействию принимают Yз = 0.
Перед нахождением передаточных функций структурную схему системы необходимо привести к одноконтурному виду.
1. Передаточная функция САР по управляющему воздействию определяет взаимосвязь между изменением регулируемой величины Y и изменением управляющего воздействия Yз:
![]() ; (2.13.1)
; (2.13.1)
где Wп(p) передаточная функция прямой цепи системы; Wр(p) передаточная функция разомкнутой системы.
При выводе передаточной функции (2.13.1) воспользовались (2.12.1) и (2.12.3).
2. Передаточная функция САР по возмущающему воздействию определяет взаимосвязь между изменением регулируемой величиной Y и изменением возмущающего воздействия F:
![]() . (2.13.2)
. (2.13.2)
При выводе (2.13.2) исходную структурную схему для наглядности можно преобразовать к виду, представленному на рис. 2.13.2. При таком преобразовании учитывали то, что Yз = 0 и поэтому звено Wз можно исключить.
WOY
WOF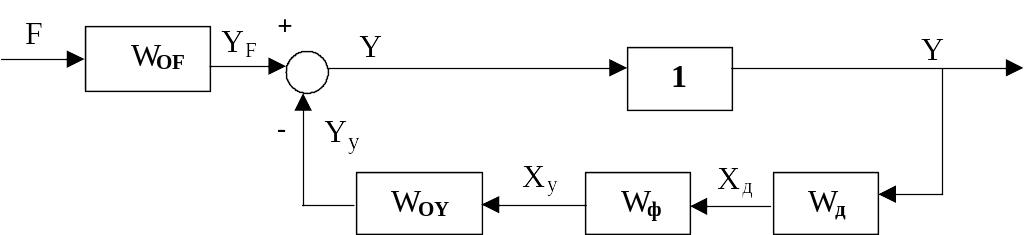
Рис. 2.13.2 Преобразованная структурная схема САР при условии Yз = 0
3. Передаточная функция САР для ошибки по управляющему воздействию определяет взаимосвязь между изменением ошибки еy и изменением задающего воздействия Yз:
(2.13.3)
Коэффициенты передачи датчика и задатчика равны друг другу, поскольку Yз и Y должны быть представлены в одном масштабе. Поэтому, если пренебречь инерционностью датчика и задатчика или считать их динамические свойства приблизительно одинаковыми, то Wз = WД и передаточная функция (2.13.3) приобретает вид:
![]() .
(2.13.4)
.
(2.13.4)
Форма 2.13.4 особенно удобна для исследования статических ошибок, когда инерционность звеньев системы не имеет значения.
4. Передаточная функция САР для ошибки по возмущающему воздействию определяет взаимосвязь между изменением ошибки е и изменением возмущающего воздействия F:
![]() .
(2.13.5)
.
(2.13.5)
Примеры получения передаточных функций САР приведены в литературе [1].