

2. КУРСОВАЯ РАБОТА
|
|
|
Рис. 9 |
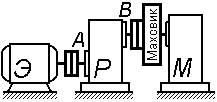
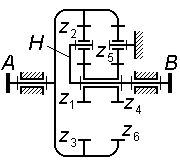
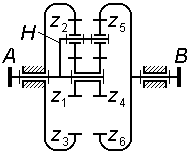
Вал двигателя и входной вал A редуктора, а также выходной вал B редуктора и вал входного звена (кривошипа) рычажного механизма соединены между собой муфтами. На валу кривошипа размещен маховик с целью снижения неравномерности хода.
Рабочий цикл агрегата совершается за один оборот кривошипа.
2.1. Проектирование редукторов общего назначения
2.1.1. Содержание задания
Для редуктора заданы:
кинематическая схема (табл. 2.1);
модули m зубчатых передач редуктора;
условия проектирования одной из зубчатых пар внешнего зацепления (перечень свойств, которыми должна обладать проекти-руемая пара – табл. 2.3);
продолжительность
(в секундах) рабочего цикла агрегата
![]() ;
частота вращения
;
частота вращения![]() и угловая скорость
и угловая скорость![]() выходного валаB
редуктора
выходного валаB
редуктора
![]() ,
об/мин;
,
об/мин;
![]() ,
рад/с.
,
рад/с.
Для заданной схемы редуктора требуется:
вывести
формулу передаточного отношения
![]() редуктора, выразив его величину через
числа зубьев колес;
редуктора, выразив его величину через
числа зубьев колес;
оценить
кинематические возможности редуктора,
установив до-стижимые пределы его
передаточного отношения и приемлемый
диапазон частоты вращения
![]() входного вала (или вала электродвигателя,
поскольку
входного вала (или вала электродвигателя,
поскольку![]() );
);
из
каталога (табл. 2.2) выбрать приемлемый
по частоте вращения
![]() электродвигатель и уточнить требуемую
величину передаточного отношения
редуктора
электродвигатель и уточнить требуемую
величину передаточного отношения
редуктора![]() ;
;
подобрать
числа зубьев всех колес редуктора,
обеспечивая получение знака (если он
оговорен в задании) и требуемой величины
|![]() |;
для соосных частей редуктора предусмотреть
(если это возможно) многосателлитное
исполнение. По подобранным числам зубьев
определить фактическое значение
передаточного отношения
|;
для соосных частей редуктора предусмотреть
(если это возможно) многосателлитное
исполнение. По подобранным числам зубьев
определить фактическое значение
передаточного отношения
![]() и фактическую частоту вращения выходного
вала редуктора
и фактическую частоту вращения выходного
вала редуктора
![]() =
=
![]() (отклонение полученной величины
(отклонение полученной величины
![]() от требуемой не должно превышать 2%).
от требуемой не должно превышать 2%).
При
кинематическом расчете рычажного
механизма частоту вращения вала кривошипа
считать равной найденной здесь вели-
чине
![]() .
.
Выполнить
кинематический расчет редуктора,
используя выбран-ную частоту вращения
![]() вала электродвигателя и подобранные
числа зубьев колес; для всех звеньев
рассчитать частоту абсолютного вращения,
а для звеньев, образующих вращательные
пары, рассчитать также частоту
относительного вращения.
вала электродвигателя и подобранные
числа зубьев колес; для всех звеньев
рассчитать частоту абсолютного вращения,
а для звеньев, образующих вращательные
пары, рассчитать также частоту
относительного вращения.
Рассчитать соответствующие найденным частотам вращения угловые скорости;
исследовать геометрию указанной в задании зубчатой пары внешнего зацепления:
- выбрать коэффициенты смещения для колес ислледуемой пары, обеспечивая получение передачи с заданными свойствами;
- произвести геометрический расчет пары и проверить его правильность на компьютере с помощью контролирующей программы;
- выполнить проверку геометрических показателей качества зацепления;
- рассчитать измерительные размеры;
- вычертить картину зацепления.
Исследовать энергетические и силовые соотношения для редуктора;
-
рассчитать значение момента полезного
сопротивления
![]() на выходном валу редуктора (если оно не
задано), приняв его равным среднему
значению движущего момента
на выходном валу редуктора (если оно не
задано), приняв его равным среднему
значению движущего момента![]() на валу кривошипа рычажного механизма;
в общем случае для его расчета можно
использовать соотношение
на валу кривошипа рычажного механизма;
в общем случае для его расчета можно
использовать соотношение
![]() ;
;
здесь
![]() - угол (в градусах) качания звена рычажного
механизма, нагруженного моментом
- угол (в градусах) качания звена рычажного
механизма, нагруженного моментом![]() полезного сопротивления, Н×м;
полезного сопротивления, Н×м;
![]() - ход звена (в метрах), нагруженного силой
- ход звена (в метрах), нагруженного силой![]() ,
Н; если механизм пре-одолевает только
момент
,
Н; если механизм пре-одолевает только
момент![]() (или только силу
(или только силу![]() ),
то в этой формуле будет отсутствовать
второе (соответственно, первое) слагаемое;
любое слагаемое может повторяться, если
у механизма не менее двух рабочих звеньев
с однотипной нагрузкой;
),
то в этой формуле будет отсутствовать
второе (соответственно, первое) слагаемое;
любое слагаемое может повторяться, если
у механизма не менее двух рабочих звеньев
с однотипной нагрузкой;
- составить все необходимые уравнения равновесия и баланса мощностей с учетом потерь на трение в кинематических парах;
-
вывести расчетные формулы и рассчитать
значения всех вращающих моментов с
учетом трения; если значения КПД
кинемати-ческих пар в задании не
оговорены, руководствоваться величинами:
![]() - для вращательной пары,
- для вращательной пары,![]() - для зацепления цилиндрическими колесами
(как внешнего, так и внутреннего),
- для зацепления цилиндрическими колесами
(как внешнего, так и внутреннего),![]() - для конического зацепления и
- для конического зацепления и![]() - для червячного; определить КПД редуктора
- для червячного; определить КПД редуктора![]() ;
по тем же расчетным формулам определить
значения вращающих моментов без учета
трения и убедиться, что в этом случае
;
по тем же расчетным формулам определить
значения вращающих моментов без учета
трения и убедиться, что в этом случае![]() =
1.0. Для редукторов, выполенных по замкнутой
схеме, установить характер распределения
мощностей по ветвям кинематической
цепи редуктора и установить наличие
(или отсутствие) замкнутой мощности;
=
1.0. Для редукторов, выполенных по замкнутой
схеме, установить характер распределения
мощностей по ветвям кинематической
цепи редуктора и установить наличие
(или отсутствие) замкнутой мощности;
-
рассчитать величины окружных сил
![]() в зацеплении; при этом одну из величин
-
в зацеплении; при этом одну из величин
-![]() или
или![]() (найденную без учета трения), считать
заданной, а другую - проверить по
результатам расчета усилий.
(найденную без учета трения), считать
заданной, а другую - проверить по
результатам расчета усилий.
Примечание: исходные данные к этой части задания кодируются в виде набора символов и обозначений дополнительных условий (если эти условия оговариваются, то они помещаются в круглые скобки); например
04(![]() =3)
- 3.5 -
=3)
- 3.5 -![]() - 4 (
- 4 (![]() ,
,
![]() =1),
=1),
где
04
- обозначение схемы (табл. 2.1); (![]() =
3) -число сателлитов
в соосной части редуктора (если
=
3) -число сателлитов
в соосной части редуктора (если
![]() не оговарено, то
оно может быть любым, отличным от
единицы); 3.5
- модуль зубчатых колес, мм;
не оговарено, то
оно может быть любым, отличным от
единицы); 3.5
- модуль зубчатых колес, мм;
![]() -обозначение
рассчитываемой зубчатой пары внешнего
зацепления; 4 -
условие проектирования пары (табл. 2.3);
(
-обозначение
рассчитываемой зубчатой пары внешнего
зацепления; 4 -
условие проектирования пары (табл. 2.3);
(![]() ,
,
![]() =1)
- дополнительные
условия (могут отсутствовать) в данном
случае означают, что межосевое расстояние
должно быть округлено до целого числа
и коэффициент смещения у колеса
=1)
- дополнительные
условия (могут отсутствовать) в данном
случае означают, что межосевое расстояние
должно быть округлено до целого числа
и коэффициент смещения у колеса
![]() равен
равен![]() .
.
2.1.2. Кинематические схемы редукторов
|
Табл. 2.1 | ||
|
01 |
02 |
03 |
|
|
|
|
|
04 |
05 |
06 |
|
|
|
|
|
07 |
08 |
09 |
|
|
|
|
|
10 |
11 |
12 |
|
|
|
|





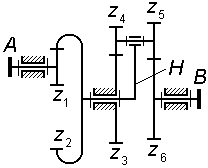



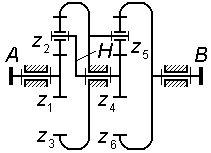


Табл. 2.1 (продолжение)
|
13 |
14 |
15 |
|
|
|
|
|
16 |
17 |
18 |
|
|
|
|
|
19 |
20 |
21 |
|
|
|
|
|
13 |
14 |
15 |
|
|
|
|




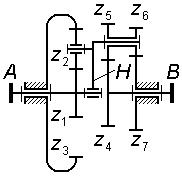





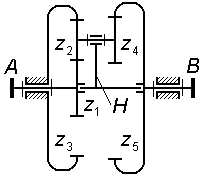
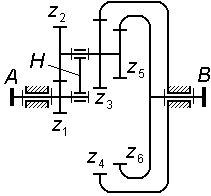
Табл. 2.1 (продолжение)
|
16 |
17 |
18 |
|
|
|
|
|
19 |
20 |
21 |
|
|
|
|
|
22 |
23 |
24 |
|
|
|
|
|
25 |
26 |
27 |
|
|
|
|
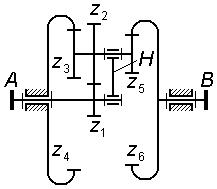
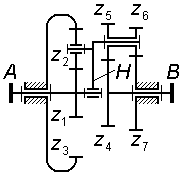










Табл. 2.1 (продолжение)
|
28 |
29 |
30 |
|
|
|
|
|
31 |
32 |
33 |
|
|
|
|
|
34 |
35 |
36 |
|
|
|
|
|
37 |
38 |
39 |
|
|
|
|












Табл. 2.1 (продолжение)
|
40 |
41 |
42 |
|
|
|
|

2.1.3.
Частоты
вращения
![]() валов
электродвигателей, об/мин
валов
электродвигателей, об/мин
Табл. 2.2.
|
670 |
730 |
935 |
975 |
1430 |
1465 |
2880 |
|
675 |
900 |
950 |
1390 |
1435 |
1470 |
2900 |
|
680 |
910 |
955 |
1415 |
1445 |
2810 |
2940 |
|
700 |
915 |
965 |
1420 |
1455 |
2840 |
2945 |
|
720 |
920 |
970 |
1425 |
1460 |
2850 |
2950 |
2.1.4. Условия проектирования зубчатой передачи
|
Табл. 2.3 | |
|
№№ |
Условие |
|
1 |
Набольшая изгибная прочность передачи. |
|
2 |
Набольшая контактная прочность передачи. |
|
3 |
Набольшая износостойкость передачи. |
|
4 |
Набольшая плавность зацепления пары. |
|
5 |
Наибольшие диаметральные размеры шестерни. |
|
6 |
Наибольшие диаметральные размеры колеса. |
|
7 |
Наименьшие диаметральные размеры шестерни. |
|
8 |
Наименьшие диаметральные размеры колеса. |