

1.3 Выбор принципиальной схемы главных цепей и структурной электрической схемы системы.
Выбор конкретного варианта реализации силовой схемы зависит от мощности двигателя и характера работы системы, а также числа пусков и торможений, которые обуславливают возможность уменьшения потерь в приводе и способность частичного возврата тормозной энергии в сеть (режим рекуперации энергии). По причине того, что мощность двигателя относительно не велика < 10кВт, то в применении системы обеспечивающей рекуперацию энергии нет необходимости. Энергия, выделяемая при торможении мала и применение системы с рекуперацией экономически не выгодно. Часть энергии выделяемой при торможении привода затрачивается на потери в кинематической цепи, а оставшаяся часть рассеивается в виде тепла на тормозном резисторе. На основании всего вышеизложенного принимаем вариант силовой схемы преобразователя следующего типа:
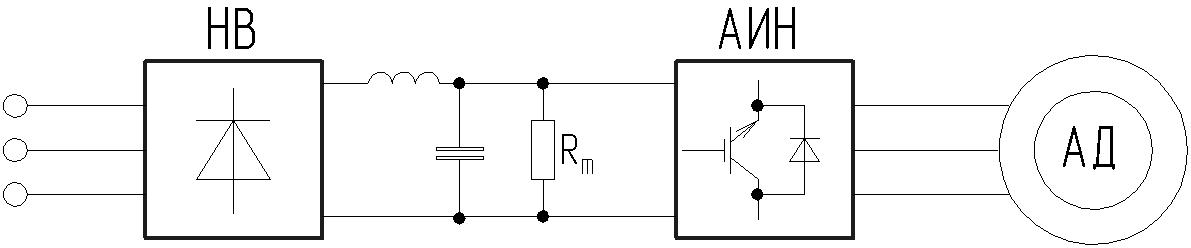
Рисунок 1.3.1 – Обобщенная силовая схема ПЧ.
Данная силовая схема представляет собой двухзвенный преобразователь, который состоит из неуправляемого выпрямителя (НВ) на стороне переменного тока и автономного инвертора (АИН). Оба звена – выпрямитель и инвертор отделены друг от друга звеном постоянного тока, в состав которого входят емкость, сглаживающий дроссель, а также включаемый отдельно специальный тормозной резистор. Данный тип схемы представляет собой наиболее простой и распространенный вариант реализации двухзвенных преобразователей средней и малой мощности. Также существует необходимость в применении тормозного резистора, так как двигатель обладает значительной мощностью и рассеяннее ее в кинематической цепи при торможении не будет полным
2. Выбор системы электропривода.
2.1 Определение параметров главных цепей.
Предварительно произведем расчет параметров асинхронного двигателя на основании его Т-образной схемы замещения.
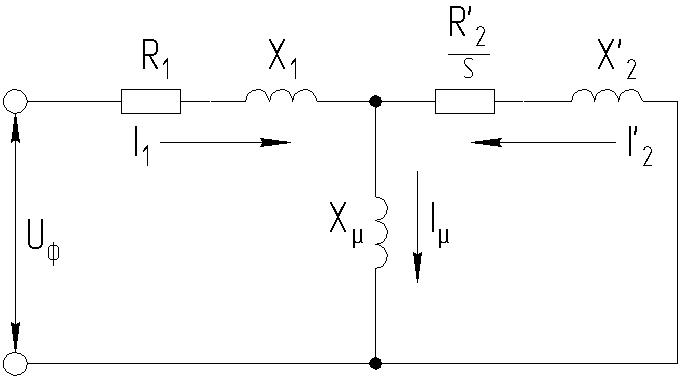
Рисунок 2.1.1 – Эквивалентная Т – образная схема замещения для одной фазы асинхронного двигателя.
Для расчета параметров схемы замещения воспользуемся стандартной методикой изложенной в учебно-методическом пособии [2].
Номинальный ток обмотки статора:
 (2.1)
(2.1)
Определяем номинальные потери мощности:
 (2.2)
(2.2)
Принимаем:
![]() (2.3)
(2.3)
![]() (2.4)
(2.4)
Момент холостого хода:
 (2.5)
(2.5)
Электромагнитный номинальный момент:
![]() (2.6)
(2.6)
Переменные номинальные потери мощности в роторе:
![]() (2.7)
(2.7)
Задаёмся коэффициентом
загрузки
![]() ,
который соответствует максимальному
коэффициенту полезного действия АД:
,
который соответствует максимальному
коэффициенту полезного действия АД:
![]() ,
принимаем:
,
принимаем:
![]()
Переменные номинальные потери мощности:
 (2.8)
(2.8)
Постоянные потери мощности:
![]() (2.9)
(2.9)
Переменные номинальные потери мощности в обмотках статора:
![]() (2.10)
(2.10)
Активное сопротивление обмотки статора:
 (2.11)
(2.11)
Максимальное значение электромагнитного момента:
![]() (2.12)
(2.12)
Коэффициент:
 (2.13)
(2.13)
Сопротивление:
 (2.14)
(2.14)
Приведенное активное сопротивление фазы ротора:
 (2.15)
(2.15)
Индуктивное сопротивление короткого замыкания:
![]() (2.16)
(2.16)
Критическое скольжение:
 (2.17)
(2.17)
Коэффициент:
 (2.18)
(2.18)
Рассчитываем
электромагнитный момент АД по формуле
Клосса для найденных параметров и
скольжения
![]() :
:
 (2.19)
(2.19)

Сравниваем
![]() ,
рассчитанный по формуле (2.6) с
,
рассчитанный по формуле (2.6) с
![]() ,
если погрешность
,
если погрешность
![]() превышает допустимую (обычно 5-10%), то
корректируем
и повторяем расчет.
превышает допустимую (обычно 5-10%), то
корректируем
и повторяем расчет.
![]()
![]()
 (2.20)
(2.20)
Следовательно, дальнейший перерасчет выполнять не стоит.
Принимаем:
![]() (2.21)
(2.21)
Рассчитываем потери в стали:
![]() (2.22)
(2.22)
Рассчитываем ток холостого хода:
![]() (2.23)
(2.23)
Эквивалентное сопротивление намагничивающего контура:
 (2.24)
(2.24)
Синус
![]() холостого хода:
холостого хода:
 (2.25)
(2.25)
Индуктивное сопротивление намагничивающего контура:
 (2.26)
(2.26)
Определив значения сопротивлений, рассчитываем значения индуктивностей.
 (2.27)
(2.27)
 (2.28)
(2.28)
 (2.29)
(2.29)
Выполним построение
механических и электромеханических
характеристик двигателя. Механические
и электромеханические характеристики
асинхронного короткозамкнутого двигателя
при изменении скольжения от
![]() до 1 выражаются параметрическими
уравнениями:
до 1 выражаются параметрическими
уравнениями:
 (2.30)
(2.30)
 (2.31)
(2.31)
 (2.32)
(2.32)
Угловая скорость при этом изменяется по уравнению:
![]() (2.33)
(2.33)
Определяем номинальный ток ротора:
![]() . (2.34)
. (2.34)
Определяем пусковой ток ротора:
![]() (2.35)
(2.35)
![]() (2.36)
(2.36)
Определяем пусковой момент
![]() (2.37)
(2.37)
Принимаем по
пособию [1, стр.29]
![]() .
.
Определяем
![]()
 (2.38)
(2.38)

Определяем
![]() и
и
![]()
![]() (2.39)
(2.39)
![]() . (2.40)
. (2.40)
Определяем действующее значение номинальное ЭДС взаимоиндукции:
![]() (2.41)
(2.41)
![]()
Определяем пусковой ток:
![]() . (2.42)
. (2.42)
Определяем
действующее значение ЭДС взаимоиндукции
при скольжении
![]()
![]() (2.43)
(2.43)
![]()
Определяем
коэффициент
![]()
 . (2.44)
. (2.44)
Определяем
коэффициент
![]()
 (2.45)
(2.45)
 (2.46)
(2.46)
![]() (2.47)
(2.47)
 (2.48)
(2.48)
Определяем
коэффициент
![]()
 (2.49)
(2.49)
Определяем
коэффициент
![]()
![]() . (2.50)
. (2.50)
Определяем эквивалентное сопротивление статора и ротора:
 , (2.51)
, (2.51)
![]() (2.52)
(2.52)
![]() (2.53)
(2.53)
Рассчитав все параметры уравнений (2.30) − (2.33), перенесем уравнения в Mathcad и выполним построение характеристик по уравнениям, изменяя скольжение от до 1. В результате построения получаем следующие характеристики:
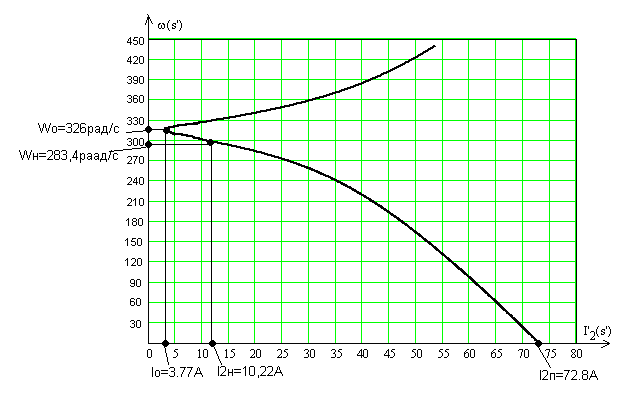
Рисунок 2.1.2 –
Электромеханическая характеристика
АД,
![]()
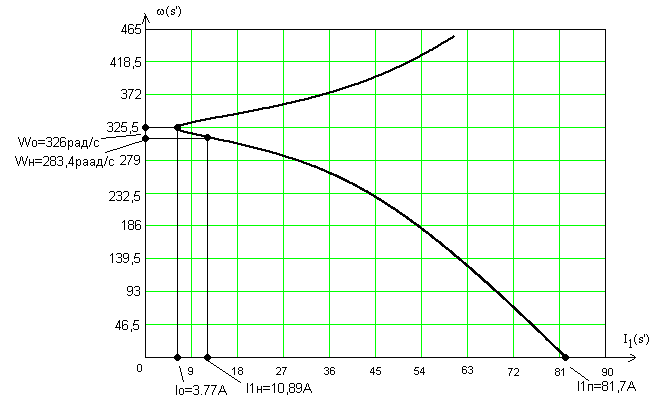
2.1.3 – Электромеханическая
характеристика АД,
![]()
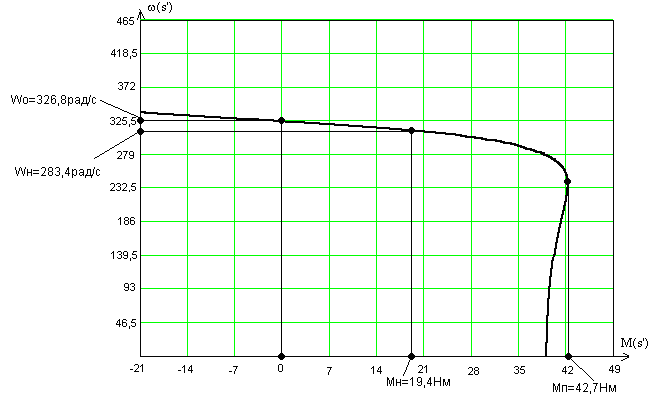
2.1.4 – Механическая
характеристика АД,
![]()